1.本发明涉及智能垃圾桶技术领域,特别是涉及一种红外感应装置及智能垃圾桶。
背景技术:
2.随着社会的发展,家居生活逐渐向智能化发展,使人们的生活更加便利、舒适,智能垃圾桶是生活中较为常见的智能家居,其价格亲民,使用方法简单,作为日用品自然受到人们的青睐。
3.现有的智能垃圾桶大多采用红外感应来控制垃圾桶桶盖的开合,但是现有的红外感应结构一般采用红外接收管和红外发射管集成,形成回路控制垃圾桶桶盖的开合,而红外发射管和红外接收管工作面积较大,使用在垃圾桶上容易有工作面积的重叠,导致智能垃圾桶桶盖错误开合,为此提出一种红外感应装置及智能垃圾桶。
技术实现要素:
4.为了克服现有技术的不足,本发明提供一种红外感应装置及智能垃圾桶,有利于提高装置的实用性,结构紧凑且能有效防止智能垃圾桶桶盖的错误开合。
5.为解决上述技术问题,本发明提供如下技术方案:一种红外感应装置,所述红外感应装置包括红外支架,所述红外支架底部固定安装有pcb板,所述pcb板上固定安装有红外发射管和红外接收管,所述红外发射管和红外接收管上分别套设有遮光套,所述遮光套固定于所述红外支架顶部。
6.优选的,所述遮光套内底部开设有卡槽,所述红外发射管和红外接收管位于所述卡槽内,所述遮光套内固定安装有限位卡块,所述限位卡块与所述红外发射管和红外接收管抵接。
7.优选的,所述红外发射管和红外接收管工作面均为扇形。
8.本发明还提供了如下技术方案:一种智能垃圾桶,采用了上述的红外感应装置,所述智能垃圾桶包括桶身,所述桶身顶部铰接固定有大翻盖,所述红外感应装置固定安装于所述大翻盖内一侧,所述大翻盖内远离所述红外感应装置一侧固定安装有驱动件,所述红外感应装置内位于所述驱动件一侧通过光轴固定安装有旋转角码,所述旋转角码一端穿过大翻盖固定安装有小翻盖,所述小翻盖活动连接所述大翻盖,所述驱动件传动连接所述旋转角码,所述红外感应装置电气连接所述驱动件。
9.优选的,所述大翻盖包括基座和翻盖框架,所述基座底部与所述桶身顶部活动连接,所述翻盖框架固定安装于所述基座顶部。
10.优选的,所述驱动件包括马达,所述马达输出端同轴固定有齿轮,所述马达表面贴合有固定架,所述固定架上螺纹连接有锁紧螺栓,所述锁紧螺栓螺纹连接所述翻盖框架。
11.优选的,所述旋转角码包括第一旋转角码和第二旋转角码,所述第二旋转角码内侧设有啮合齿,所述齿轮与啮合齿啮合。
12.优选的,所述大翻盖表面一侧固定安装有控制按钮,所述控制按钮电气连接所述
驱动件。
13.优选的,所述大翻盖顶部一侧固定安装有红外滤光片,所述红外滤光片位于所述红外感应装置上方。
14.优选的,所述桶身底部四角均固定安装有支撑脚。
15.本发明的红外感应装置及智能垃圾桶的工作原理为:在需要往智能垃圾桶内丢垃圾时,先将智能垃圾桶通电,用物体通过红外滤光片上方,红外感应装置上的红外发射管发出扇形的红外线,透过红外滤光片与物体接触后反射,部分红外线反射进红外接收管的扇形工作面内,被红外接收管接收,形成回路后控制驱动件启动,驱动件带动齿轮转动,通过与啮合齿啮合带动第二旋转角码绕光轴转动,带动小翻盖转动翻起,第一旋转角码被小翻盖带动与第二旋转角码同步运动,智能垃圾桶打开,随后驱动件反转带动小翻盖和旋转角码复位,智能垃圾桶完成一个开合进程;
16.同时还可通过控制按钮控制驱动件的启动,使智能垃圾桶完成开合进程,进一步提高装置的实用性。
17.与现有技术相比,本发明能达到的有益效果是:
18.1、通过设置的遮光套,将遮光套套设在红外发射管和红外接收管上,便于对红外发射管和红外接收管的重合部分工作面进行阻挡,防止因红外发射管和红外接收管的工作面重合,导致电路错误导通,智能垃圾桶错误开合,有利于提高装置的实用性;
19.2、通过设置在遮光套内的卡槽,将红外发射管和红外接收管设置在卡槽内,便于对红外发射管和红外接收管进行定位,通过设置在遮光套内的限位卡块,将限位卡块抵接在红外发射管和红外接收管上,进一步对红外发射管和红外接收管定位,提高装置的稳定性,保障装置正常工作,进一步提高装置的实用性。
附图说明
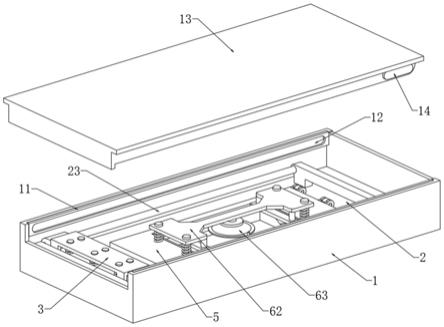
20.图1为实施例中一种智能垃圾桶的整体结构示意图;
21.图2为实施例中一种智能垃圾桶的大翻盖结构示意图;
22.图3为实施例中一种智能垃圾桶的翻盖框架内部结构示意图
23.图4为实施例中一种智能垃圾桶的驱动件结构爆炸视图;
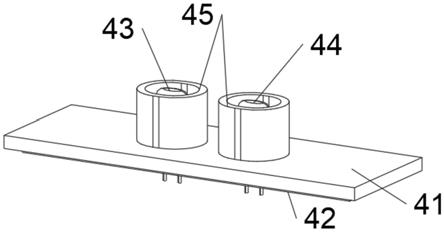
24.图5为实施例中一种红外感应装置的整体结构示意图;
25.图6为实施例中一种红外感应装置的整体结构爆炸视图;
26.图7为实施例中一种红外感应装置的遮光套内部结构示意图;
27.其中:1、桶身;2、大翻盖;21、基座;22、翻盖框架;3、小翻盖;4、红外感应装置;41、红外支架;42、pcb板;43、红外发射管;44、红外接收管;45、遮光套;451、卡槽;452、限位卡块;5、旋转角码;51、第一旋转角码;52、第二旋转角码;521、啮合齿;6、驱动件;61、马达;62、齿轮;63、固定架;64、锁紧螺栓;7、支撑脚;8、控制按钮;9、红外滤光片。
具体实施方式
28.下面结合说明书附图1-7,通过具体实施例进行阐述,说明本发明的技术方案。
29.实施例:
30.如图1-7所示,本发明提供的一种红外感应装置及智能垃圾桶,智能垃圾桶包括桶
身1,桶身1顶部铰接固定有大翻盖2,大翻盖2包括基座21和翻盖框架22,基座21底部与桶身1顶部活动连接,翻盖框架22固定于基座21顶部,翻盖框架22内一侧固定安装有红外感应装置4,翻盖框架22表面一侧固定安装有控制按钮8,翻盖框架22顶部位于红外感应装置4上方固定安装有红外滤光片9,翻盖框架22内远离红外感应装置4一侧通过光轴固定有旋转角码5和驱动件6,旋转角码5一端穿过翻盖框架22固定安装有小翻盖3,小翻盖3与翻盖框架22活动连接,旋转角码5包括第一旋转角码51和第二旋转角码52,第二旋转角码52内侧设有啮合齿521,驱动件6包括马达61,马达61输出端同轴固定有齿轮62,齿轮62与啮合齿521啮合,马达61表面贴合有固定架63,固定架63上螺纹连接有若干锁紧螺栓64,锁紧螺栓64螺纹连接翻盖框架22,红外感应装置4和控制按钮8分别电气连接驱动件6,桶身1底部固定安装有支撑脚7,红外感应装置4包括红外支架41,红外支架41底部固定安装有pcb板42,pcb板42上固定安装有红外发射管43和红外接收管44,红外发射管43和红外接收管44位于红外支架41上方,红外发射管43和红外接收管44外侧均套设有遮光套45,遮光套45固定安装于红外支架41顶部,遮光套45内底部开设有卡槽451,红外发射管43和红外接收管44位于卡槽451内,遮光套45内固定安装有限位卡块452,限位卡块452于红外发射管43和红外接收管44抵接,红外发射管43和红外接收管44的工作面均为扇形。
31.该实施例中的红外感应装置控制智能垃圾桶可采用红外感应控制,也可通过控制按钮的方式控制智能垃圾桶的工作,具体工作步骤如下。
32.红外感应装置控制智能垃圾桶的工作步骤为:
33.(1)、首先,将智能垃圾桶通电,红外发射管43开始工作,发射扇形红外线透过红外滤光片9,用物体经过红外滤光片9上方,红外发射管43发射的扇形红外线触碰物体后发生反射,部分红外线进入红外接收管44的扇形工作面内,形成回路后控制驱动件6启动;
34.(2)、马达61开始转动,在齿轮62和啮合齿521配合下传动第二旋转角码52绕光轴转动,带动小翻盖3绕光轴转动翻起,第一旋转角码51在小翻盖3作用下与第二旋转角码52同步运动,智能垃圾桶开启;
35.(3)、随后马达61反转,带动第一旋转角码51、第二旋转角码52和小翻盖3复位,完成智能垃圾桶的单个开合进程。
36.控制按钮控制智能垃圾桶的工作步骤为:
37.(1)、智能垃圾桶通电后,按动控制按钮8,控制按钮8发出信号控制驱动件6启动;
38.(2)、随后的工作步骤与红外感应装置控制智能垃圾桶的工作步骤(2)和(3)相同。
39.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。