1.本发明属于无人机技术和电机控制领域,涉及一种绳系无人机自主对接系统的协调控制方法。
背景技术:
2.在使用旋翼直升机之类的大型空中平台吊运物资时,普遍存在空中平台与被吊运物资的对接问题。现在普遍采用的方法是通过地面工作人员手动将物资与平台挂载点连接。空中运输载体首先要尽可能的靠近待运输物资,然后地面工作人员用吊杆将挂载着物资的缆绳对接到载体上。这对操作人员,包括平台驾驶员和地面人员的相互配合提出了要求,同时工作流程复杂,具有一定的危险性。
3.如何实现空中平台与地面物资的自主对接自然而然成为了亟待解决的问题。尤其是在复杂环境下,如何保证自主对接系统的稳定性和可靠性,实现与物资的精准对接都需要细致的考量。目前相关的研究较少,更多的是研究对接以后物资运输的过程问题。
技术实现要素:
4.要解决的技术问题
5.为了避免现有技术的不足之处,本发明提出一种绳系无人机自主对接系统的协调控制方法。目的在于设计一种能够实现大型空中平台与地面物资自主对接的系统,最终实现对接机构和目标物体之间的对接或分离。该对接系统可广泛应用于航母舰群之间或是复杂地形的无障碍运输,利用没有地形限制的大型空中平台,能完成灵活的垂直补给、特种作战,战场救援等多种任务。利用设计的控制律,保证对接过程的稳定性和可靠性。
6.技术方案
7.一种绳系无人机自主对接系统的协调控制方法,其特征在于协调控制步骤如下:
8.步骤1、构建自主对接系统:自主对接系统包括末端自主对接机构和平台系绳收放机构;以飞行器作为与地面物资的末端对接机构,电机固连在空中平台上,系绳两端分别连接电机和末端飞行器;
9.步骤2、对末端自主对接系统施加相应的控制:
10.1)构建空间坐标描述:末端四旋翼无人机在笛卡尔直角坐标系下表示,分别建立惯性坐标系o-xyz和固连在机身上的机体坐标系o
b-xbybzb;
11.2)建立自主对接系统的动力学模型:末端自主对接系统的动力学方程分为平台系绳收放和末端四旋翼两部分:
12.平台系绳收放:
[0013][0014]
j为电机转动惯量,ω为电机角速度,k
t
为扭矩常数,b
t
为粘性摩擦系数;t和dr分别为系绳拉力和电机转轴半径;
[0015]
四旋翼:
[0016][0017]
其中(x,y,z)和(φ,θ,ψ)分别表示四旋翼的位置和欧拉角;(i
x
,iy,iz)和m分别表示四旋翼的转动惯量和质量,为电机转轴到四旋翼中心的机臂长度,g为重力加速度;t表示系绳拉力,α,β分别表示系绳在水平面投影与x轴夹角以及系绳与水平面夹角;di,i=1,
…
,6表示收到的干扰;
[0018]
3)保持系绳控制力矩恒定:以无人机的实时位置,计算系绳的角度和长度变化,控制电机使得系绳拉力保持定值,此时系绳处于微张状态;
[0019]
伺服电机的pi控制器:
[0020][0021]
其中u为电压输入,k
p
和ki分别为比例系数和积分系数。id为期望电流,i为实际电流;
[0022]
4)设计末端四旋翼无人机的控制律:控制分为位置环和姿态环控制;
[0023]
位置环控制包括分为高度和水平位置控制;姿态环包括俯仰,横滚和偏航的控制流程:
[0024]
高度:
[0025][0026]
水平:
[0027][0028]
滚转角:
[0029][0030]
偏航角:
[0031][0032]
以控制律实现整个自主对接系统的良好控制。
[0033]
有益效果
[0034]
本发明提出的一种绳系无人机自主对接系统的协调控制方法,构建自主对接系统,包括末端自主对接机构和平台系绳收放机构。对末端自主对接系统施加相应的控制,分别设计了末端四旋翼无人机再高度、水平、滚转角和偏航角的控制律。能够实现大型空中平台与地面物资自主对接的系统,最终实现对接机构和目标物体之间的对接或分离。该对接系统可广泛应用于航母舰群之间或是复杂地形的无障碍运输,利用没有地形限制的大型空中平台,能完成灵活的垂直补给、特种作战,战场救援等多种任务。利用设计的控制律,保证对接过程的稳定性和可靠性。
附图说明
[0035]
图1为自主对接系统示意图
[0036]
图2为自主对接系统控制流图
[0037]
图3为x轴位置和位置误差
[0038]
图4为y轴位置和位置误差
[0039]
图5为z轴位置和位置误差
[0040]
图6为对接流程
具体实施方式
[0041]
现结合实施例、附图对本发明作进一步描述:
[0042]
步骤一的自主对接系统分为两个部分:
[0043]
1)四旋翼飞行器作为垂直起降无人机中的一种,由于机动性强,结构简单,成本低,可实现低空飞行和定点悬停等功能,在军事和民用领域得到了广泛的应用。这里使用四旋翼飞行器作为与地面物资的末端对接机构,在搭载摄像头等传感器后可实现对物资的识别定位,进而通过自主控制实现与物资的对接。
[0044]
2)平台系绳收放机构主要包括伺服电机和系绳,电机固连在空中平台上,系绳两端分别连接电机和末端四旋翼。该机构的主要作用是配合四旋翼无人机的飞行,平台电机根据四旋翼的实时位置对系绳进行收放控制。既要避免系绳收放过度导致系绳与四旋翼发生缠绕,又要保证系绳对四旋翼的作用力不会影响其正常飞行。
[0045]
步骤二:
[0046]
1)构建空间坐标描述
[0047]
末端四旋翼无人机在笛卡尔直角坐标系下表示,分别建立惯性坐标系o-xyz和固连在机身上的机体坐标系o
b-xbybzb,如图1所示。
[0048]
2)建立自主对接系统的动力学模型
[0049]
平台系绳收放机构:
[0050]
为了完成系统的模型,我们添加了系绳和电机的行为。为此,绳子的张力是:
[0051]
[0052][0053]kt
是绳的弹性系数,这里为定值。r为实际绳长,dr为电机滚轮半径,为电机转过的角度。
[0054]
电机的电路方程为:
[0055][0056]
v和i表示电机电压和电流,l和re为电机的电感和内阻,ω为电机角速度,ke为与电力相关的常数。
[0057]
电机力矩方程可以表示为:
[0058][0059]
j为电机转动惯量,ω为电机角速度,k
t
为扭矩常数,b
t
为粘性摩擦系数。t和dr分别为系绳拉力和电机滚轮半径。
[0060]
末端四旋翼:
[0061]
作用在机体上的沿惯性坐标轴的绳拉力可以分别表示为:
[0062]
tz=tsinβ
[0063]
t
x
=tcosβcosα
[0064]
ty=tcosβsinα
[0065]
由牛顿-欧拉方程
[0066][0067]
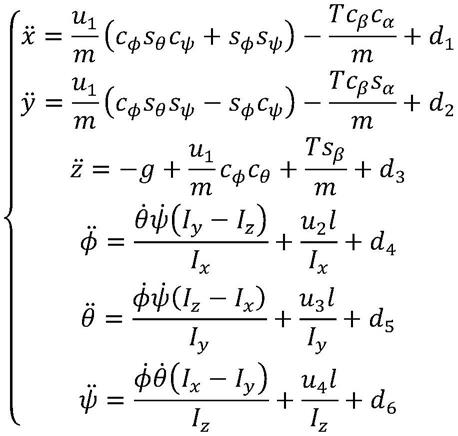
代入到目标对象四旋翼中可以得到动力学方程为:
[0068][0069]
其中(x,y,z)和(φ,θ,ψ)分别表示四旋翼的位置和欧拉角。(i
x
,iy,iz)和m分别表示四旋翼的转动惯量和质量,为电机转轴到四旋翼中心的机臂长度,g为重力加速度。t表示
系绳拉力,α,β分别表示系绳在水平面投影与x轴夹角以及系绳与水平面夹角。di(i=1,
…
,6)表示收到的干扰。
[0070]
3)保持平台电机力矩恒定
[0071]
这里使用工业级伺服电机,输入的电流最终会转化为实际转矩。由于电流的采样率非常高,加入微分项会引入高频噪声,所以这里只采用pi控制。控制器设计如下:
[0072][0073]
其中u为电压输入,k
p
和ki分别为比例系数和积分系数。id为期望电流,i为实际电流。
[0074]
4)设计末端四旋翼无人机的控制律
[0075]
末端四旋翼的控制分为位置环和姿态环控制。位置环控制又分为高度和水平位置控制,而姿态环俯仰,横滚和偏航的控制流程相似。
[0076]
高度:
[0077]
取虚拟控制量
[0078][0079]
设计pid控制器如下
[0080][0081]
于是有
[0082][0083]
水平位置输出期望的俯仰角和横滚角:
[0084]
取虚拟控制量
[0085][0086][0087]
设计pid控制器如下
[0088][0089][0090]
进一步可以推导出
[0091]
[0092][0093]
俯仰角:
[0094]
取虚拟控制量
[0095][0096]
设计pid控制器如下
[0097][0098]
于是有
[0099][0100]
滚转角:
[0101]
取虚拟控制量
[0102][0103]
设计pid控制器如下
[0104][0105]
于是有
[0106][0107]
偏航角:
[0108]
取虚拟控制量
[0109][0110]
设计pid控制器如下
[0111][0112]
于是有
[0113][0114]
最终可以实现整个自主对接系统的良好控制。
[0115]
以上描述的实施例仅仅是本发明适用的一个实施例。凡是基于本发明中的实施例所做的简单修改和任何没有创造性劳动所得出的成果本质上仍属于本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
