基于角激光技术(alt)的形态长度测量设备和相关方法
技术领域
1.本发明涉及利用角激光技术(alt)执行形态长度测量方法的设备,由此本公开描述了测量元件以及具体地使用该测量元件进行该测量的方法。本发明的设备包括主壳或盒,该主壳或盒由通过枢轴点连接在一起的两个部分限定,使得第一部分可以相对于第二部分转动或旋转,并且在第一部分的内部装有用于使用光子返回进行测量的激光测距仪、加速度计、数据处理器、显示元件、电位计或电阻调节器、一系列操作按钮或开关以及电源系统(例如电池或相似物)。
背景技术:
2.当前,对不规则形状的形态学测量需要相当复杂的设备和过程,这又需要使用相当昂贵的技术和合格的人员来获得足够且准确的测量结果。这个事实是完全不希望的,因此代表了本领域的明确需求。
3.因此,在现有技术中,存在与通过激光技术执行某种类型的长度测量的设备有关的多个公开,其中存在描述了水平和垂直水平的角度和距离测量设备的文献us 7350303,角度和距离测量设备适用于指示两个或更多个点何时彼此齐平,并且适合于测量两个或更多个点(点和线或点和平面)之间的距离和角度。该测量设备包括:测量点,用于识别要从何处计算出测量结果;用户激活的执行器;以及向用户实时或以记忆模式显示测量结果的屏幕。该设备具体包括壳体(外壳)、电源、检测六个自由度的一个或多个传感器、处理器、启动器按钮和显示屏。该设备还包括多个运动传感器,该运动传感器包括至少三个加速度计和三个角速率传感器。
4.然而,该公开的缺点在于,尽管其涉及一种使用激光和传感器来检测所述激光的用于测量距离或长度的设备,以及用于倾斜测量的加速度计,其中所有信息都显示在屏幕上并且可以通过激活按钮和显示模式来操纵,上面仅提及其具有在其中包括所有元件的壳或盒,其中所述盒是固定和静态的元件,其不旋转并且不允许在传感器和加速度计之间进行适当的对准以便以最充分,最准确的方式获得测量结果。
5.另一方面,us 7568289公开了包括距离测量引擎和角位置测量引擎的手持式测量设备,其中,控制器控制这种测量引擎并将仰角、方位角位置或相对角位置与从仰角引擎获取的距离测量结果相关联。同样,该设备具有存储在存储器中的算法,用于计算取决于所述位置引擎的距离测量结果的测量结果。另外,它包括可以对应于屏幕的用户界面,以显示从目标获得的测量结果。除上述之外,该设备在角位置马达中具有加速度计,该加速度计与所述距离测量引擎一起安装在共同的刚性基板上。
6.然而,与先前定义的文献一样,前述的缺点在于其利用静态的固定盒,没有枢轴点或移动轴,因此不可能正确地对加速度计和激光计进行对准。因此具有运动自由度,因此可以得出结论,测量结果不准确,因此完全是不希望的。
7.现在,在现有技术中,us 2011288818还描述了一种用于测量距离、角度和相关几何量的非接触式测量装置。因此,可见光束或超声波束允许用户将设备指向测量距离的一
个或多个点,并且可以测量和记录各个关注点之间的角旋转。以此方式,该设备包括:适合于人类使用者抓握并由此携带该设备的壳体;相干光源,可以沿第一方向指向,以照亮要测量的距离;距离测量元件;确定特定角度的角位移或旋转感测元件;数据存储元件;处理器,其从传感器接收多个输入;显示单元,向用户提供操作特征和测量信息;以及适于接收来自所述用户的输入以控制所述装置的操作的用户界面。
8.但是,其中描述的技术基于测量元件,而未针对角位置使用加速计,这可能会导致测量结果不一致或错误,而壳或外盒则很简单,没有枢轴点或不同的部分,进一步增加了测量误差的可能性。
9.除上述之外,cn 106093468公开了一种角加速度测量设备,当使用加速度计测量角加速度时,该角加速度测量设备可减少校准和时间成本,其中,该设备包括沿敏感轴平行安装的两个柔性石英加速度计,加速度计的质心之间的距离可以通过精确的角振动台进行校准来获得。
10.但是,与先前公开的文献一样,该文献具有以下缺点:它没有具体提及线性距离或其测量,而是着眼于角加速度测量(运动中),同时使用固定且简单的外盒或壳,没有分歧或枢轴点;同样,它与用户之间没有任何交互元件,因此无法以任何方式对其进行控制,而仅限于预先建立的配置。
11.最后,us 2017097235描述了一种非接触式测量装置,该非接触式测量装置测量相对于平坦表面上的点在平面中的两个或三个维度的取向和/或相对于曲面来测量二维的取向,其中,该测量装置包括:多个测距元件,能够测量所提供的任何信息量的处理器,将输出信号转换为用户用来了解信息的输出格式的输入设备,可携带的电源,执行封装信号或与电源有关的功能中的一项或多项功能的连接电路,以及支撑件,其中支撑件包括物理覆盖物、设备、紧固件和/或可用于支撑和/或布置测量装置的一个或多个组件的组件的任意组合。
12.但是,与上面提到的某些现有技术文献一样,该方法的缺点是它没有具体提及加速度计的使用,因此所获得的测量结果可能是错误的或不一致的,而它是基于固定和简单的盒或壳,没有枢轴部分,因此不可能将激光器和其他元件对准以得到更充分和/或更准确的测量结果。
13.类似地,在本领域中存在公开内容“a simple optical device for measuring free surface deformations of nontransparent liquids(用于测量非透明液体的自由表面变形的简单光学设备)”,journal of colloid and interface science,第288卷,第2期,2005年8月15日,第508-512页,其为科学文献,涉及一种用于测量无液表面变形的光学设备,其中该设备使用光束激光,该激光可以聚焦在任何选定的位置。光学器件设计为在镜头和所选点之间的距离等于焦距时测量最大强度,从而可以进行高度测量。然后,该设备将重点放在铁磁流体池的测量上,在其中测量法向场不稳定性峰的高度。
14.从前几段中的定义可以清楚地看到,有许多公开内容定义了一种用于基于光束激光和以及一系列传感器来测量距离或长度的设备或装置,传感器检测所述光束反射强度,从而确定从起点到终点的长度,其中所有现有技术的设备都具有外壳或盒,键盘或输入设备以及用于向用户显示信息的输出设备,但是其中所述壳或盒是完全固定的或静止的,没有运动的元件,因此不允许激光与加速度计充分对准来获得最合适和最准确的测量结果。
15.根据以上信息,对于本领域技术人员而言,显然需要设计和实现一种用于测量长度,特别是生物形态的设备,其中该设备允许通过使用一系列激光传感器和加速度计执行对具有完全不规则的形状的生物体各部分的测量,从而可以进行准确,适当的测量,同时要求移动元件在这些传感器和加速度计之间进行对齐,以便这些元件始终位于同一平面内,因此,可以实现适当测量的目的。
16.发明概述
17.在第一方面,本发明涉及用于借助于角激光技术(alt)测量长度的设备,该角激光技术是用于获得特定长度的新方法,其中所述技术基于函数和三角关系来利用激光测距仪提供的两个测量结果以及加速度计提供的角度计算个体或特定形态学度量的长度。
18.另外,该计算出的长度可以用于将初始长度外推到其他形态学测量。因此,一旦所有设备都在运行,遵循以下步骤来获得测量结果:
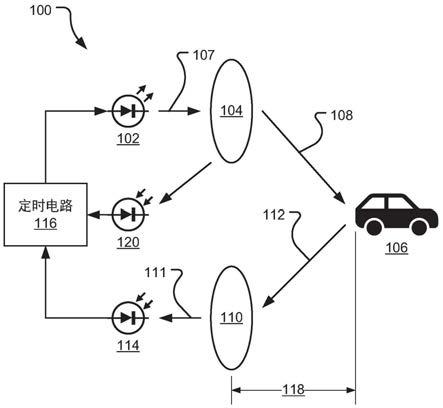
19.该设备旨在收集四个数据以获得lc,数据如下:距离1,即设备与初始测量点之间的距离;位置1(a),由圆形空间(1)中的一个点组成;距离2(b),即设备与颅骨检查台背面之间的距离;最后是位置2(2),这是设备标记的第二位置。
20.因此,位置1和2相减的绝对值将得到距离1和2之间的角度。使用这些距离和该角度寻求的是应用三角形的三角关系来找到导管,在这种情况下,将是个体的部分长度或全长。
21.在内部,设备被编程为自动执行这些计算,因此,在该协议中,仅指示设备的内部过程,其优点在于,所述设备的操作者不必执行任何计算。
22.在优选实施方案中,本发明基于一种先前定义的设备,该设备主要由定制的外盒或外壳组成,在其中容纳了五个基本组件,在这些组件中,既有商业硬件,也有开放式硬件设备。它们的内部单元和容纳在壳或盒中的内部单元是:激光测距仪,一到三轴加速度计,数据处理单元,显示元件,操作按钮和电源,例如电池。
23.在甚至更优选的实施方案中,盒或外壳是定制的元件,并且具有两个主要部件或部分,这两个主要部件或部分通过称为枢轴点的轴线彼此耦接,该枢轴点使两个主要部件或部分能够相关地运动。该运动是可能的,因为壳的第一部分只在加速度计的旋转轴线上有一个销,并且该销插入壳的另一部分中的孔中,这使得第一部分可以在轴线上运动。
24.随着壳体的第一部分相对于第二部分的旋转,主要特征是它使激光测距仪和加速度计都可以在同一轴线上对齐,此外,还可以保护电子组件,例如电缆和数据处理器。
25.在另一个实施方案中,本发明涉及一种通过应用或使用上述设备来测量距离,优选地是生物的形态的方法,其中,所述方法基于设备在待测量物体的同一测量平面中的位置。然后,使用激光计进行(a)的测量,并使用操作按钮记录该距离值和位置值。然后,移动设备的上部,直到激光器位于位置2。(b)被测量并与(2)一起记录。完成上述步骤后,您将具有(a),(b),(1)和(2),并且设备将显示所需的长度。为了进行测量的外推,设备将采用已经建立的公式,并将此结果与初始测量的长度一起显示在屏幕上。
26.计算公式:
27.距离间的角度:长度公式:
28.29.根据目标距离(t.d)校正偏差
30.l
correction
=lc
alt-(
–
0.00134-0.002x t.d)
31.在整个说明书和权利要求书中,词语“包括”及其变体并不旨在排除其他技术特征、添加剂、组分或步骤。对于本领域技术人员而言,本发明的其他目的、优点和特征将部分地从描述中得到,部分地从本发明的实践中得到。通过举例的方式提供以下实施例和附图,并不旨在限制本发明。
附图说明
32.从以下附图中更清楚地理解本发明,其中示出了与本设备、装置、系统或方法相关的不同组件、部件或步骤,以及相对于现有技术的新颖性元素,其中,附图并非旨在限制本发明的范围,本发明的范围仅由所附权利要求书确定,其中:
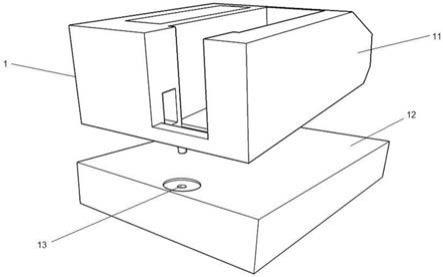
33.图1对应于本发明的设备的透视图,其中示出了在外壳或盒的第一上部和第二下部之间的旋转或枢轴点。
34.图2对应于该设备的上部和下部的俯视图。
35.图3对应于该设备的侧视图,其中可以看到上部和下部。
36.发明详述
37.然后,将定义本发明及其最佳实施方式,其中包括其最佳实施方案,应将其尽可能广泛地理解为没有限制。
38.从这个意义上讲,本发明主要针对一种使用角激光技术(alt)测量形态长度的设备,该设备包括以下组件或部件:
39.·
包括第一上部部分(11)和第二下部部分(12)的盒或外壳(1),其中,这些部分在枢轴点(13)处接合在一起,从而使它们能够相对于彼此旋转,作为本设备一部分的所有元件都位于所述部分内部。
40.·
激光测距仪(2),其对应于通过光子返回来测量本发明的设备与固定点之间的距离的组件,其中,所述测距仪(2)位于盒或外壳(1)的上部部分(11)内。
41.·
加速度计(3),其操作为1到3维轴,并且与任何开放式硬件设备兼容,并负责测量设备与测量点之间的距离与所述设备与待测对象的背面之间的角度,其中所述加速度计(3)位于盒或外壳(1)的下部部分(12)内。
42.·
数据处理器(4),其对应于控制所有其他元件和本发明设备的操作的控制元件,其中所述处理器优选地使激光计(2)和加速度计(3)能够开启,进行组件校准以及进行距离测量后获得的处理和数据计算。
43.·
显示元件(5),其优选地对应于与数据处理器(4)兼容的屏幕,其中,所述屏幕可以优选地是触摸型的。
44.·
与显示元件(5)兼容的电位计,其最小电阻特性为10kω。
45.·
与数据处理器(4)兼容的操作按钮,通过它们可以控制设备的操作,并使用户能够进行适当的测量。此外,这些按钮对应于与用户的接口,因此它们也用于配置本发明的设备的元件。
46.·
电源,对应于以完整方式为设备供电的模块,其中,所述电源最好是可拆卸类型的电源,例如商用电池,并且最好具有9v dc的最小工作电压,尽管根据先前定义的本发明
的元件的工作条件也可以考虑较低的电压。
47.因此,在本发明的一个实施方案中,激光测距仪(2)是可商购的组件,其在本发明的设备中用于操作的最小特征是:40m的最小距离范围;设备标准误差
±
2mm或更小。
48.同样,优选的是,数据处理器(4)具有其最低规格必须为以下的工作特征:工作电压:5v,闪存:32kb,sram:2kb,时钟速度:16mhz,模拟输入:8;数字输入:8至12。
49.另一方面,所有组件都通过电缆彼此连接,这对于本领域技术人员而言可能是显而易见的,其中,所述电缆的材料可以根据所需的导电性需求而变化,但是其中可以在本发明内考虑进行所述修改。
50.在一优选实施方案中,盒或外壳(1)由高强度且优选地重量轻的材料制成。
51.现在,本发明还涉及一种通过上述设备测量距离的方法,其中,所述方法包括以下步骤:
52.a)将设备放置在与要进行测量的同一平面上;
53.b)通过激光计获得设备与初始测量点之间的距离1;
54.c)确定位置a,该位置a由圆形空间中的点组成;
55.d)获得设备与待测设备的颅骨检查台背面之间的距离2;
56.e)移动设备的上部部分(11)时,确定位置b,这是设备标记的第二位置;
57.f)将位置1和2相减以获得距离1和2之间的角度;
58.g)当具有a,b,1和2的值时,查看在屏幕(5)上获得的信息;
59.h)从以下方程式外推测量结果:
60.距离间的角度:
61.长度:
62.i)在显示元件中显示计算结果。
63.迄今为止,该描述对应于本发明的一个或多个实施方案,并且不意图限制如所附权利要求书中所建立和定义的本技术的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。