双光电二极管光检测和测距
背景技术:
1.光检测和测距(也称为激光成像、检测和测距;激光雷达(lidar;lidar;lidar;或ladar))是一种通过用激光源照射目标并用传感器测量激光的反射来测量距离(也称为测距)的方法。激光返回时间和相位和/或波长差可以随后用于估计目标和激光源之间的距离。激光雷达具有地面、机载和移动应用。
2.lidar的一个应用是对对象进行测距和检测以用于自主车辆(例如,汽车、卡车、船艇、飞机和航天器)的控制和导航。自主车辆lidar尤其具有挑战性,因为自主车辆包装要求需要复杂的光学器件来定向lidar系统的激光源。此外,目标尺寸、形状和相对速度以及到自主车辆的距离对于自主车辆lidar系统来说是未知的。此外,目标对象在自主车辆lidar系统范围内的位置可能随着时间的推移而迅速变化。因此,本公开的技术用于扩展现有技术lidar系统的动态范围。此外,由lidar光学器件引入的误差或干扰在此具体地处理,这些lidar光学器件先前未被当作现有技术lidar系统中的误差的单独贡献者来处理。
技术实现要素:
3.本文描述和要求保护的实现方式通过提供双光电二极管激光雷达系统来解决上述问题,该双光电二极管激光雷达系统包括光源,光源将距离测量光束定向到目标上;主光电二极管,主光电二极管接收来自目标的光束的反射;次光电二极管,次光电二极管接收说明光学器件误差的平衡信号;以及定时电路,定时电路基于主光电二极管和次光电二极管的组合输出来确定光源和目标之间的距离。
4.本文描述和要求保护的实现方式通过进一步提供操作双光电二极管激光雷达系统的方法来进一步解决上述问题。该方法包括将来自光源的距离测量光束定向到目标上;在主光电二极管上接收来自目标的光束的反射;在次光电二极管上接收说明光学器件误差的平衡信号;以及使用定时电路基于主光电二极管和次光电二极管的组合输出来确定光源和目标之间的距离。
5.本文描述和要求保护的实现方式通过更进一步提供双光电二极管激光雷达系统来更进一步解决上述问题。该系统包括光源,光源将距离测量光束定向到目标上;主光电二极管,主光电二极管接收来自目标的光束的反射;次光电二极管,次光电二极管接收说明光学器件误差的平衡信号;以及光学器件组,光学器件组将来自光源的光束定向到目标并定向来自目标的光束的反射。光学器件误差是由来自光学器件组的错误反射和折射中的一者或多者引起的。该系统进一步包括跨阻放大器,其中主光电二极管的输出和次光电二极管的输入两者都连接到公共节点处的跨阻放大器的电流输入。该系统仍进一步包括定时电路,定时电路基于与公共节点处的跨阻放大器的电流输入相对应的来自跨阻放大器的电压输出来确定光源和目标之间的距离。
6.本文还描述和叙述了其他实现方式。
附图说明
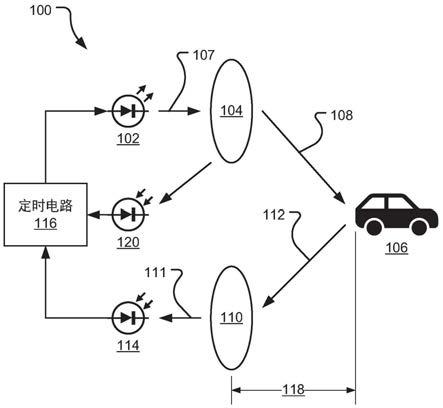
7.图1示出了示例双光电二极管lidar系统。
8.图2示出了用于双光电二极管lidar系统的示例光学器件组件。
9.图3示出了示例双光电二极管lidar电路图。
10.图4示出了另一个示例双光电二极管lidar电路图。
11.图5示出了用于操作双光电二极管lidar系统的示例操作。
12.图6示出了适于实现双光电二极管lidar系统的计算机系统的示例系统图。
具体实施方式
13.lidar光学路径,特别是共同定位的发射器/接收器路径配置中的lidar光学路径可能引入可能落在一个或多个光电传感器上的由镜、透镜和/或包壳材料或玻璃带来的意外和不需要的反射。由于一个或多个光电传感器接收到的光可能既包括从目标反射的光,也包括没有超出lidar系统的光,因此这些不期望的信号可能会导致输出放大器偏置的明显中断和/或严重通道饱和。自主车辆lidar系统具有独特的约束,其中部分或全部约束可能不存在于其他lidar系统中。目前公开的双光电二极管lidar系统用于分离和补偿lidar光学器件引入的误差,以提高lidar系统(包括但不限于自主车辆lidar系统)的精度和可靠性。
14.图1示出了与例如自主汽车结合使用的示例双光电二极管lidar系统100。系统100从光源102(例如,激光二极管或发光二极管(led))开始,光源102通过发射器光学器件104发射光束(例如,红外光,如箭头107、108所示),以将光定向并聚焦在目标106(此处图示为汽车)上。如箭头111、112所示,光束的一部分从目标106反射并在检测器光学器件110处返回到系统100。检测器光学器件110收集反射光并将反射光聚焦在主光电传感器114(例如,雪崩光电二极管(apd)、多像素光子计数器(mppc)或pin光电二极管)上。光源102和光电传感器114都连接到定时电路116(例如,时间-数字转换器(tdc)),该定时电路116计算光束的返回时间(也称为飞行时间或tof),并比较发射光和返回光的相位差,以测量到目标106的距离118。
15.可以使用直接或间接检测方案来测量tof。在示例直接tof检测方案中,光源102发射短光脉冲(例如,几纳秒长),并且定时电路116测量直到每个脉冲都返回到光电传感器114的时间,以测量到目标106的距离118。在示例间接tof检测方案中,光源102发射调制光的连续波。光电传感器114检测来自目标106的任何反射光,并且反射光的定时和相位(在一些实现方式中为波长差)用于计算到目标106的距离118。
16.使用直接检测方案,系统100可以发射速率超过100khz的快速光脉冲。使用间接检测方案,lidar系统100可以通过将反射的相位与源波形的相位匹配来提高定时分辨率。无论系统100利用哪种检测方案(或使用两种检测方案),都很难以所需的精度和分辨率精确地测量反射定时(和相位),特别是对于自主车辆。
17.由于目标106的尺寸、形状、和相对速度以及到自主车辆的距离未知,自主车辆lidar尤其具有挑战性。因此,系统100的校准可能需要在距光源102的各种距离(例如,1-250米)处准确地检测小目标对象和大目标对象,这导致来自光电传感器114的输出电流范围相对较宽(例如,从10纳安到100毫安)。此外,系统100范围内的目标对象(例如,目标106)
的位置可能潜在地随着时间而迅速变化(例如,由于目标106相对于自主车辆的相对速度,由自主车辆的速度、目标的速度或其组合而引起的)。因此,系统100可能需要相对高的采样率(例如,大于20个采样/秒)和检测精度,以防止未检测到的目标撞击自主车辆,或反之亦然,从而潜在地导致自主车辆和/或目标106损坏,或自主车辆和/或目标106的(多个)乘员受伤或死亡。
18.在各种实现方式中,发射器光学器件104和检测器光学器件110包括镜、透镜和/或滤波器的阵列,所述镜、透镜和/或滤波器中的任意或全部可能导致光在系统100内的不希望的反射或折射。然而,存在于光学器件104、110的各种表面上的污垢或其他污染物、对光学器件104、110的各种表面造成的损坏(例如,划痕)和/或光学器件104、110内的制造缺陷可能增加光的不希望的反射或折射的量,在不存在任何特定污染物、损坏或缺陷的情况下,光的一些不希望的反射或折射可能存在于光学器件104、110上或内部。光的不希望的反射或折射的一部分可以到达主光电传感器114,从而使到目标106的距离118的计算发生偏差。系统100内产生到目标106的距离118的偏差计算的光的不希望的反射或折射在本文中被称为光学器件误差。
19.为了使系统100的检测准确度和精度最大化,系统100利用次光电传感器120(例如,apd、mppc或pin光电二极管)来检测光学器件误差,并消除来自被定向到主光电传感器114的光的反射和/或折射误差。定时电路116利用来自两个光电传感器114、120的输出,并将这些输出与由光源102生成的光进行比较,以计算到目标106的光学器件误差补偿距离118。
20.系统100还可以用于通过扫描区域并使用到目标106的所计算的距离的结果矩阵来映射目标106,来制作目标106的数字三维表示。本文所公开的双光电二极管lidar创建的测距和三维表示的各种应用包括测量学、大地测量学、地理信息学、考古学、地理学、地质学、地貌学、地震学、林业、大气物理学、激光制导、机载激光测绘(alsm)和激光测高。
21.图2示出了用于双光电二极管lidar系统的示例光学器件组件232。光源202向一对转向镜222、224发射出射光束(如实心箭头208所示),转向镜222、224依次以期望的角度将光束定向到振镜226。光束从振镜226反射到多边形镜228,多边形镜228定向光穿过窗口230并从光学器件组件232射出,窗口230是保护玻璃或塑料屏障。
22.在操作期间,振镜226上下振荡,并且多边形镜228旋转(如箭头212所示),以提供从光学器件组件232垂直朝外(例如,与水平方向成 /-10度,总范围为20度)和水平朝外(例如,范围为60度)的扫描视场。由于在平面视图中描绘了光学器件组件232,因此未示出振镜226的垂直振荡和光学器件组件232的结果垂直检测范围,而箭头212所示的多边形镜228的旋转产生箭头234所示的结果水平检测范围。
23.目标206(此处图示为汽车)存在于光学器件组件232的扫描视场和范围内。如虚线236、238所示,光束的一部分从目标206反射并返回光学器件组件232边界内,虚线236、238定义了光学器件组件232可检测的反射光的边界。具体地,入射光通过窗口230进入光学器件组件232并被定向到多边形镜228。入射光从多边形镜228沿着与出射光束类似的路径反射到振镜226。入射光被定向到收集透镜240,其将入射光聚焦在主光电传感器214上。尽管未示出,入射光也可以从一个或多个转向镜反射以定向入射光并将入射光分布在收集透镜240上。光源202和主光电传感器214都连接到定时电路(未示出,参见例如图1的定时电路
116),该定时电路计算光束的返回时间(也称为飞行时间或tof),并比较出射光束和入射光的相位差,以测量到目标206的距离。
24.使用扫描视场内的重复距离测量,双光电二极管lidar系统可以构建扫描视场的复杂地图(也可以是点云),包括目标206的表面。更具体地,可以使用lidar图像处理器转换原始距离测量阵列,以基于原始距离测量阵列创建三维点云。这可以通过以扫描模式定向出射光束来实现,使用检测到的反射和相对应的距离测量来创建捕获扫描视场的图像,包括但不限于具有细节、深度和清晰度的目标206。
25.然后,点云可以由lidar图像处理器进一步处理,以提供扫描视场的详细感测,包括到各种目标(例如,目标206)的形状和距离,其中每个目标可能随时间而改变。这可能导致一系列连续的点云,这些点云可以与lidar系统的已知位置、速度和方向结合使用,以识别对象及其相对运动矢量,并预测和避免lidar系统与任何已识别的目标之间的碰撞。
26.如本文所设想的光学器件组件232包括发射器光学器件和检测器光学器件中的一者或两者,光学器件组件232中的一些组件可以在发射器光学器件和检测器光学器件之间共享,如图2所示。例如,发射器光学器件包括转向镜222、224、振镜226、多边形镜228和窗口230,而检测器光学器件包括振镜226、多边形镜228、窗口230和收集透镜240。因此,整个光学器件组件232包括转向镜222、224、振镜226、多边形镜228、窗口230和收集透镜240。进一步的实现方式可以包括发射器光学器件和检测器光学器件中的一者或两者内的附加光学部件(例如,镜、滤波器和透镜)。
27.光学器件组件232的任意或所有镜、透镜和/或滤波器(包括明确示出和描述的镜、透镜和/或滤波器以及未明确示出和描述的光学器件组件232的其他部件)可能导致光学器件组件232内的光发生不希望的反射或折射。然而,存在于光学器件组件232的各种表面上的污垢或其他污染物、对光学器件组件232各种表面造成的损坏和/或光学器件组件232内的制造缺陷可能会增加光的不希望的反射或折射的量,在不存在任何特定污染物、损坏或缺陷的情况下,光的一些不希望的反射或折射可能存在于光学器件组件232上或内部。光的不希望的反射或折射的一部分可以到达主光电传感器214,从而使到目标206的距离的计算发生偏差。光学器件组件232内产生到目标206的距离的偏差计算的光的不希望的反射或折射在本文中被称为光学器件误差。
28.为了使光学器件组件232的检测准确度和精度最大化,光学器件组件232利用次光电传感器220来检测光学器件误差,并消除来自被定向到主光电传感器214的光的反射和/或折射误差。定时电路利用来自两个光电传感器214、220的输出,并将这些输出与由光源202生成的光进行比较,以计算到目标206的光学器件误差补偿距离,并使用重复的光学器件误差补偿测量连续映射目标206。
29.虽然在图2中描述了单通道双光电二极管lidar系统并且描绘了相关联的光学器件组件232,但是其他实现方式可以包括具有类似的(多个)相对应的光源、发射器光学器件、检测器光学器件和(多个)光电传感器的附加通道。一些部件可在多个通道之间共享(例如,多边形镜228可以在两通道双光电二极管lidar系统之间共享)。
30.图3示出了示例双光电二极管lidar电路图300。光源302连接到电源342,低阻抗能量存储设备(或电容器)344在光源302附近并联连接以用于为tof脉冲提供能量。光源302进一步连接到n型mosfet 346,该n型mosfet 346从定时电路(未示出,参见例如,图1的定时电
路116)接收信号348,以按照预定频率和脉冲宽度点亮光源302。如箭头308所示,光源302通过发射器光学器件(未示出,参见例如,图2的光学器件232的子集)发射光束,该发射器光学器件将光定向并聚焦在目标306(此处,图示为汽车)上。如箭头312所示,光束的一部分从目标306反射并通过检测器光学器件(未示出,参见例如,图2的光学器件组件232的另一个子集)返回到主光电传感器314。
31.发射器光学器件和/或检测器光学器件的各种部件可能导致从光源302发射的光的不希望的反射或折射。如箭头334所示,光的不希望的反射或折射的一部分可到达主光电传感器314,从而将由于不希望的信号而产生的误差添加至到目标306的距离的计算中或改变模拟偏置点。产生到目标306的距离的偏差计算的光的不希望的反射或折射在本文中被称为光学器件误差。
32.如箭头350所示,次光电传感器320还接收光的不希望的反射或折射(或近似光的不希望的反射或折射的单独专用馈源,也称为平衡信号或馈源)。在各种实现方式中,来自光源302的平衡信号可以通过专用路径(例如,从光源302到次光电传感器320的一系列镜或光纤线缆)传输。专用路径可以被选择为具有与被定向到主光电传感器314上的光的不希望的反射或折射的内部定时相等的长度。在其他实现方式中,平衡信号可以是来自窗口(例如,图2的窗口230)的漫反射。平衡信号可以用于消除由被定向到主光电传感器314上的不希望的反射光和/或折射光所产生的光学器件误差。
33.平衡信号用于扩展主传感器路径的动态范围(如箭头334所示),并允许主路径在没有不希望的反射和/或折射光(如箭头350所示)引起的噪声的情况下工作。此外,下文详细讨论的跨阻放大器(tia)358的饱和在其恢复时导致一段有限的“盲”期。平衡信号消除或减少了盲期。此外,使用平衡信号在主传感器路径的精度上有一些提升。本文中使用的“光学器件误差”可以被视为误差和对主路径的干扰中的一者或两者。
34.在各种实现方式中,光电传感器314、320是在系统300内物理上充分间隔开的独立设备,以区分被定向到光电传感器314、320中的一者上的光与被定向到光电传感器314、320中的另一者上的光。在光电传感器314、320物理上未充分间隔开(例如,光电传感器314、320靠近彼此放置)的实现方式中,可以在光电传感器314、320之间放置光学屏障(optical barrier)或其他遮挡物。在更进一步的实现方式中,可以在公共管芯(例如,三端子双光电二极管)上制造光电传感器314、320。三端子双光电二极管的一侧可以被遮挡,并被单独馈送平衡信号(例如,通过将光纤耦合到光电二极管之一中)。此外,在三端子双光电二极管中,光电二极管可以朝向不同方向(例如,主光电二极管可以朝向上方,而次光电二极管可以朝向侧面)来取向,以帮助光分离。无论实现方式如何,将光电传感器314、320之间的光的光学消除最小化,使得电路图300可以电消除光,如图所示和所述。
35.光电传感器314、320两者都连接到包括电源356、电容器352和电阻器354的偏置电路,以设置光电传感器314、320的高反向偏置电压。主光电传感器314的输出被输入到tia 358,以将输入电流(i
输入
)转换并放大为可由定时电路使用以计算到目标306的距离的电压(v
出
)。到tia 358的输入进一步连接到次光电传感器320,这允许来自主光电传感器314的电流的一部分流过次光电传感器320(本文是指消除电流(i
消除
))而不是流入tia 358。次光电传感器320可以通过另一个电源357流向接地,从而为消除电流(i
消除
)提供负偏置。这会根据光学器件误差的量成比例地减少输入电流(i
输入
)。
36.双光电二极管lidar对输入电容特别敏感。双光电二极管lidar电路图300示出了利用公共节点作为tia 358的输入的两个光电传感器314、320。消除电流(i
消除
)对输入电流(i
输入
)的总量的减法效应可以防止或减少tia 358饱和的发生或发生的可能性。饱和可以由特别大的光学器件误差引起,否则(不存在次光电传感器320)将导致输入电流(i
输入
)超出tia 358的闭环电流处理能力。tia 358的饱和需要时间来恢复,同时可能不进行到目标306的距离测量。
37.在各种实现方式中,可以校准主光电传感器314、次光电传感器320和tia 358中的一者或多者处的偏置和增益中的一者或多者,以实现期望的光学器件误差消除效果。此外,进入次光电传感器320的光的强度(或增益)和/或相位可以手动或电子地调整,以与由于光学器件误差而定向到主光电二极管320上的光的强度(或增益)和/或相位进行匹配。例如,次光电传感器320的手动调整可以包括移动次光电传感器320或改变次光电传感器320相对于入射光的取向中的一者或多者。次光电传感器320的手动调整还可以包括一个或多个镜的操纵,该操纵定义到次光电传感器320的光路径或改变将光传输到次光电传感器320的光纤的长度和/或位置。此外,对进入次光电传感器320的光的增益和/或相位的手动或电子调整可以通过对准操作主动或自适应地完成。此外,可能需要校准输入电流(i
输入
)和消除电流(i
消除
)上的振幅和相位延迟,以正确匹配。此类校准和对准操作可以在制造点或现场迭代地执行,直到达到期望的光学器件误差消除效果。在其他实现方式中,光学器件误差是已知的,并且基于已知的光学器件误差预设偏置和增益。
38.图4示出了另一个示例双光电二极管lidar电路图400。光源402连接到电源442和n型mosfet 446,该n型mosfet 446从定时电路(未示出,参见例如,图1的定时电路116)接收信号448,以按照预定频率和脉冲宽度点亮光源402。本文设想了除所描绘和描述的n型mosfet 446之外的用于生成tof脉冲的其他系统和方法,例如q开关激光源。如箭头408所示,光源402通过发射器光学器件(未示出,参见例如,图2的光学器件232的子集)发射光束,该发射器光学器件将光定向并聚焦在目标406上。如箭头414所示,光束的一部分从目标406反射并通过检测器光学器件(未示出,参见例如,图2的光学器件组件232的另一个子集)返回到主光电传感器412。
39.发射器光学器件和/或检测器光学器件的各种部件可能导致从光源402发射的光的不希望的反射或折射。如箭头434所示,光的不希望的反射或折射的一部分可到达主光电传感器414,从而将由于不希望的信号而产生的误差添加至到目标406的距离的计算中或改变模拟偏置点。产生到目标406的距离的偏差计算的光的不希望的反射或折射在本文中被称为光学器件误差。
40.如箭头450所示,次光电传感器420还接收光的不希望的反射或折射(或近似光的不希望的反射或折射的单独专用馈源,也称为平衡信号或馈源)。在各种实现方式中,来自光源402的平衡信号可以通过专用路径传输。在其他实现方式中,平衡信号可以是来自窗口(例如,图2的窗口230)的漫反射。平衡信号可以用于消除由被引导到主光电传感器414上的不希望的反射光和/或折射光所产生的光学器件误差。
41.主光电传感器414连接到包括电源456、电容器454的偏置电路,以设置光电传感器414的高反向偏置电压。主光电传感器414的输出被输入到tia 458,以将输入电流(i
输入
)转换并放大为可由定时电路使用来计算到目标406的距离的电压(v
出
)。次光电传感器420连接
到包括电源460、电阻器464的偏置电路,以设置光电传感器420的高反向偏置电压。次光电传感器420的输出被输入到tia 466,以将输入电流(i
消除
)转换并放大为可由定时电路使用来消除由被定向到主光电传感器414上的不希望的反射和/或折射光所产生的光学器件误差的电压(v
出
)。
42.定时电路可以包括差分电路,差分电路接收来自两个tia 458、466的电压输出(v
出
),并使用来自tia 466的电压输出来偏移来自tia 458的电压输出,以消除由被定向到主光电传感器414上的不希望的反射和/或折射光所产生的光学器件误差。图4的电路图400具有到分开的tia 458、466的分开的输入,tia 458、466可以产生与电路图300相比整体增加的电容。对于两个电路图300、400,附加电容可以由定时电路或其他机制来说明。
43.在各种实现方式中,可以校准主光电传感器414、次光电传感器420和tia 458中的一者或多者处的偏置和增益中的一者或多者,以实现期望的光学器件误差消除效果。此外,进入次光电传感器420的光的强度(或增益)和/或相位可以手动或电子地调整,以与由于光学器件误差而定向到主光电二极管420上的光的强度(或增益)和/或相位进行匹配。例如,次光电传感器420的手动调整可以包括移动次光电传感器420或改变次光电传感器320相对于入射光的取向中的一者或多者。次光电传感器420的手动调整还可以包括一个或多个镜的操纵,该操纵定义到次光电传感器420的光路径或改变将光传输到次光电传感器420的光纤的长度和/或位置。此外,对进入次光电传感器420的光的增益和/或相位的手动或电子调整可以通过对准操作主动或自适应地完成。此外,可能需要校准输入电流(i
输入
)和消除电流(i
消除
)上的振幅和相位延迟,以正确匹配。此类校准和对准操作可以在制造点或现场迭代地执行,直到达到期望的光学器件误差消除效果。在其他实现方式中,光学器件误差是已知的,并且基于已知的光学器件误差预设偏置和增益。
44.图5示出了用于操作双光电二极管lidar系统的示例操作500。定向操作505将来自光源的距离测量光束定向到目标上。定向操作505可以将光定向通过一组发射器光学器件,该发射器光学器件可能在双光电二极管lidar系统内引起不希望的反射或折射。接收操作510在主光电二极管上接收来自目标的光束的反射。接收操作510可以将光定向通过一组检测器光学器件,该检测器光学器件可能在双光电二极管lidar系统内引起不希望的反射或折射。双光电二极管lidar系统内的不希望的反射或折射的一部分可能落在主光电二极管上,这导致接收光信号中的噪声和/或误差(本文称为光学器件误差)。
45.馈送操作515馈送平衡信号,以说明从光源到次光电二极管的光学器件误差。馈送操作515可以利用专用路径(例如,一组专用的光学器件或光纤线缆)。在各种实现方式中,专用路径具有所选择以产生与光学器件误差的定时等同的定时的长度。在一些实现方式中,馈送操作515是从双光电二极管lidar系统的前窗口或玻璃收集漫内反射的被动操作。接收操作520在次光电二极管上接收平衡信号。在一些实现方式中,次光电二极管可以与主光电二极管类似地定位在双光电二极管lidar系统内(因此位于不希望的反射或折射的类似光路径内),但位于从目标反射的光路径外。在此类实现方式中,馈送操作515可以被省略。此外,在一些实现方式中,当取消导致平衡信号的光时,来自主路径的光的有限取消可能是可接受的。
46.转换操作525将输入到跨阻放大器的电流转换为从跨阻放大器输出的电压。在各种实现方式中,主光电二极管的输出和次光电二极管的输入都连接到公共节点处的跨阻放
大器的电流输入。在其他实现方式中,主光电二极管和次光电二极管的每个的输出各自独立地连接到单独的跨阻放大器。(多个)跨阻放大器的(多个)定时电路输出连接到定时电路。
47.确定操作530使用定时电路基于来自跨阻放大器的主光电二极管和次光电二极管的组合输出来确定光源和目标之间的距离。调整操作535调整平衡信号的振幅和相位延迟,以与由于光学器件误差而被定向到主光电二极管上的光的振幅和相位延迟进行匹配。可作为校准序列来迭代地执行调整操作535以实现期望的光消除效果。
48.图6示出了适于实现双光电二极管lidar系统的计算机系统600的示例系统图。双光电二极管lidar系统包括由mosfet 646驱动的光源602,mosfet 646接收来自定时电路616的信号以按照预定频率点亮光源602。光源602向目标(未示出)处发射光束,并且光束的一部分从目标反射并返回到主光电传感器614。
49.发射器光学器件和/或检测器光学器件的各种部件可能导致从光源602发射的光的不希望的反射或折射。光的不希望的反射或折射的一部分可以到达主光电传感器614,从而使到目标的距离的准确计算发生偏差或受阻。次光电传感器620还接收以平衡信号形式的光的不希望的反射或折射。平衡信号可以用于消除由被定向到主光电传感器614上的不希望的反射光和/或折射光所产生的光学器件误差。
50.主光电传感器614的输出被输入到跨阻放大器(tia)658,以将输入电流转换并放大为可由定时电路616使用来计算到目标的距离的电压。到tia 658的输入进一步连接到次光电传感器620,这允许来自主光电传感器614的电流的一部分流过次光电传感器620而不是流入tia 658。这基于光学器件误差的量成比例地减小输入电流,该光学器件误差可以随时间变化,但是被假定为类似地影响主光电传感器614和次光电传感器620。
51.计算机系统600管理对定时电路616的访问。计算机系统600包括总线601,总线601互连主要子系统以及外部设备,主要子系统为诸如处理器605、系统存储607(诸如随机存取存储器(ram)和只读存储器(rom))、输入/输出(i/o)控制器609、可移动存储器(诸如存储卡)623、电源628,外部设备为诸如经由显示适配器612的显示屏610和各种输入外围设备615(例如,鼠标、触摸板、键盘、触摸屏、操纵杆和/或智能卡接收设备)。无线接口625和有线网络接口627一起可以用于使用本领域技术人员已知的任何网络接口系统与数据存储网络和/或局域网或广域网(诸如互联网)进行对接(interface)。
52.许多其他设备或子系统(未示出)可以以类似的方式连接(例如,服务器、个人计算机、平板计算机、智能手机、移动设备等)。此外,图6中所描绘的部件中的全部部件不必存在以实践当前公开技术。此外,其设备和部件可以与图6所示的不同的方式互连。代码(例如,包括用于实现当前公开技术的移动应用(app)的计算机软件)可以操作地设置在系统存储607和/或数据存储623中(例如,用于实现本文详细描述的定时电路616的代码)。
53.计算系统600可以包括各种有形计算机可读存储介质(例如,系统存储607和数据存储623)和无形计算机可读通信信号。有形计算机可读存储可以由可由计算系统600访问的任何可用介质实现,并且包括易失性和非易失性存储介质,以及以用于存储信息(诸如计算机可读指令、数据结构、程序模块和/或其他数据)的任何方法或技术实现的可移动和非可移动存储介质。有形计算机可读存储介质包括但不限于固件、ram、rom、电可擦除可编程只读存储器(eeprom)、闪存或其他存储器技术、光盘存储、磁带盒、磁带、磁盘存储或其他磁
存储设备,或可以用于存储期望的信息并且可由计算系统600访问的任何其他有形介质。
54.无形计算机可读通信信号可以具体化计算机可读指令、数据结构、程序模块、或驻留在调制数据信号(诸如载波或其他信号传输机制)中的其他数据。术语“调制数据信号”是指以在信号中编码信息的方式来设置或改变其特性中的一个或多个的信号。通过示例而非限制,无形通信信号包括通过有线介质(诸如有线网络或直接有线连接)以及无线介质(诸如声学、射频(rf)、红外(ir)和其他无线介质)传输的信号。如本文所定义的计算机可读存储介质具体地排除无形的计算机可读通信信号。
55.一些实现方式可以包括制品,这些制品可以包括用于存储逻辑的有形存储介质。存储介质的示例可以包括能够存储电子数据的一种或多种计算机可读存储介质,包括易失性存储器或非易失性存储器、可移动存储器或不可移动存储器、可擦除存储器或不可擦除存储器、可写入存储器或可重写存储器等。逻辑的示例可以包括各种软件元件,诸如软件部件、程序、应用、计算机程序、应用程序、系统程序、机器程序、操作系统软件、中间件、固件、软件模块、例程、子例程、操作段、方法、进程、软件接口、应用程序接口(api)、指令集、计算代码、计算机代码、代码段、计算机代码段、字、值、符号或它们的任意组合。例如,在一种实现方式中,制品可以存储可执行的计算机程序指令,当计算机执行该指令时,使计算机根据所描述的实现方式执行方法和/或操作。可执行的计算机程序指令可以包括任何合适的类型的代码,诸如源代码、编译代码、解释代码、可执行代码、静态代码、动态代码等。可执行的计算机程序指令可以根据预定义的计算机语言、方式或语法来实现,以用于指示计算机执行特定操作段。指令可以使用任何合适的高级、低级、面向对象、可视化、编译和/或解释编程语言来实现。
56.当前公开技术可以被实现为一个或多个计算机系统中的逻辑步骤(例如,作为在一个或多个计算机系统中执行的处理器实现的步骤的序列,以及作为一个或多个计算机系统中的互连机器或电路模块)。实现方式是一种选择,取决于实现当前公开技术的计算机系统的性能要求。因此,构成当前公开技术的实现方式的逻辑操作被不同地称为操作、步骤、对象或模块。此外,应当理解,逻辑操作可以按任何顺序执行,根据期望添加或替换操作,除非另有明确要求或者权利要求语言固有地需要特定顺序。
57.上述说明书、示例和数据提供了当前公开技术的示例性实现方式的结构和使用的完整描述。由于可以在不脱离当前公开技术的精神和范围的情况下作出当前公开技术的许多实现方式,因此当前公开技术位于下文所附的权利要求中。此外,不同实现方式的结构特征可以在又另一个实现方式中组合而不脱离所述权利要求。进一步的示例:示例1.一种双光电二极管激光雷达系统,包括:光源,所述光源将距离测量光束定向到目标上;主光电二极管,所述主光电二极管接收来自所述目标的所述光束的反射;次光电二极管,所述次光电二极管接收说明光学器件误差的平衡信号;以及定时电路,所述定时电路基于所述主光电二极管和所述次光电二极管的组合输出来确定所述光源和所述目标之间的距离。示例2.如示例1所述的双光电二极管激光雷达系统,进一步包括:发射器光学器件组,所述发射器光学器件组将所述光束从所述光源定向到所述目标,所述光学器件误差是由来自所述发射器光学器件组的错误反射和折射中的一者或多者引起的。
示例3.如示例2所述的双光电二极管激光雷达系统,其特征在于,所述发射器光学器件包括一个或多个转向镜、振荡振镜和旋转多边形镜。示例4.如示例1所述的双光电二极管激光雷达系统,进一步包括:检测器光学器件组,所述检测器光学器件组将所反射的光束从所述目标定向到所述主光电二极管,所述光学器件误差是由来自所述检测器光学器件组的错误反射和折射中的一者或多者引起的。示例5.如示例1所述的双光电二极管激光雷达系统,进一步包括:跨阻放大器,其中所述主光电二极管的输出和所述次光电二极管的输入都在连接到公共节点处的所述跨阻放大器,并且其中来自所述跨阻放大器的结果电压输出被输入到所述定时电路。示例6.如示例1所述的双光电二极管激光雷达系统,进一步包括:第一跨阻放大器,其中所述主光电二极管的输出连接到所述第一跨阻放大器的输入;以及第二跨阻放大器,其中所述次光电二极管的输出连接到所述第二跨阻放大器的输入,其中来自所述第一跨阻放大器和所述第二跨阻放大器两者的电压输出被输入到所述定时电路。示例7.如示例1所述的双光电二极管激光雷达系统,其特征在于,所述平衡信号经由专用路径从所述光源被馈送到所述次光电二极管。示例8.如示例7所述的双光电二极管激光雷达系统,其特征在于,所述专用路径具有被选择以产生与所述光学器件误差的定时等同的定时的长度。示例9.如示例1所述的双光电二极管激光雷达系统,其特征在于,所述主光电二极管和所述次光电二极管在所述系统内物理地间隔开。示例10.如示例1所述的双光电二极管激光雷达系统,进一步包括:光学屏障,所述光学屏障在所述主光电二极管和所述次光电二极管之间取向。示例11.如示例1所述的双光电二极管激光雷达系统,其特征在于,所述主光电二极管和所述次光电二极管靠近彼此放置并且朝向公共管芯上的不同方向来取向。示例12.如示例1所述的双光电二极管激光雷达系统,其特征在于,调整所述平衡信号的振幅和相位延迟,以与由于所述光学器件误差而被定向到所述主光电二极管上的光的振幅和相位延迟进行匹配。示例13.如示例12所述的双光电二极管激光雷达系统,其特征在于,所述平衡信号的所述振幅和所述相位延迟被电子地调整。示例14.如示例12所述的双光电二极管激光雷达系统,其特征在于,所述平衡信号的所述振幅和所述相位延迟被机械地调整。示例15.一种操作双光电二极管激光雷达系统的方法,所述方法包括:将来自光源的距离测量光束定向到目标上;在主光电二极管上接收来自所述目标的光束的反射;在次光电二极管上接收说明光学器件误差的平衡信号;以及使用定时电路基于所述主光电二极管和所述次光电二极管的组合输出来确定所述光源和所述目标之间的距离。示例16.如示例15所述的方法,其特征在于,所述主光电二极管的输出和所述次光电二极管的输入都连接到公共节点处的跨阻放大器的电流输入,所述方法进一步包括:将所述电流输入转换为来自所述跨阻抗放大器的电压输出,其中所述电压输出被输入到所述定时电路。示例17.如示例15所述的方法,进一步包括:调整所述平衡信号的振幅和相位延迟,以与由于所述光学器件误差而被定向到所述主光电二极管上的光的振幅和相位延迟进
行匹配。示例18.如示例15所述的方法,进一步包括:将所述平衡信号经由专用路径从所述光源馈送到所述次光电二极管。示例19.如示例18所述的方法,其特征在于,所述专用路径具有被选择以产生与所述光学器件误差的定时等同的定时的长度。示例20.一种双光电二极管激光雷达系统,包括:光源,所述光源将距离测量光束定向到目标上;主光电二极管,所述主光电二极管接收来自所述目标的所述光束的反射;次光电二极管,所述次光电二极管接收说明光学器件误差的平衡信号;光学器件组,所述光学器件组将来自所述光源的所述光束定向到所述目标并定向来自所述目标的所述光束的反射,所述光学器件误差是由来自所述光学器件组的错误反射和折射中的一者或多者引起的;跨阻放大器,其中所述主光电二极管的输出和所述次光电二极管的输入两者都连接到公共节点处的所述跨阻放大器的电流输入;以及定时电路,所述定时电路基于与所述公共节点处的所述跨阻放大器的所述电流输入相对应的来自所述跨阻放大器的电压输出来确定所述光源和所述目标之间的距离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。