具有宽视角的lidar装置
1.相关申请的交叉引用
2.本技术基于并要求于2020年10月12日向韩国知识产权局提交的韩国专利申请no.10-2020-0131292的优先权,该申请的公开通过全文引用合并于此。
技术领域
3.与本公开一致的示例实施例涉及光检测和测距(lidar)装置,并且更具体地,涉及具有宽视角的lidar装置。
背景技术:
4.用于在工厂或仓库中运输和返还货物的自动导航车辆(agv)通常沿规定的路线行驶。然而,为了增加工作灵活性,越来越需要通过同时定位和地图绘制(slam)来在没有定义路线的情况下基于路径规划进行自动驾驶。而且,需要使用二维(2d)光检测和测距(lidar)传感器来避开障碍物的技术。另外,近年来,已尝试通过在工厂中的各种自主移动机器人(amr)或叉车上安装三维(3d)lidar传感器来增加工作灵活性。而且,对3d lidar技术的需求正在增加,该3d lidar技术可以在室内和室外应用于从建筑物外部的仓库中运输物料。3d lidar技术不仅在检测宽水平视角(约150度至约270度)和竖直视角(约30度至约60度)的障碍方面具有优势,而且在具体地检测特定视角以便准确地测量地板的3d状态方面具有优势。
技术实现要素:
5.示例实施例至少解决上述问题和/或缺点以及以上未描述的其他缺点。此外,示例实施例不需要克服上述缺点,并且可以不克服上述问题中的任一个。
6.根据实施例的一方面,提供了一种光检测和测距(lidar)装置,包括:第一可旋转镜阵列,包括在圆周方向上布置的多个第一倾斜镜;多个光源,被构造为朝第一可旋转镜阵列发射光;第二可旋转镜阵列,包括在圆周方向上布置的多个第二倾斜镜,该第二可旋转镜阵列面对第一可旋转镜阵列,以将由第一可旋转镜阵列反射的光反射到lidar装置的外部;以及光电检测器,被构造为检测由第二可旋转镜阵列反射的光,其中,多个光源设置在通过在圆周方向上以相等间隔划分180度或更大的角度范围所得的多个区间中。
7.第一可旋转镜阵列和第二可旋转镜阵列可以被布置为绕同一轴旋转。
8.第一可旋转镜阵列的多个第一倾斜镜的数量可以是第二可旋转镜阵列的多个第二倾斜镜的数量的倍数。
9.第二可旋转镜阵列的多个第二倾斜镜可以具有不同倾斜角。
10.第一可旋转镜阵列的多个第一倾斜镜的至少一部分可以具有不同的倾斜角。
11.第一可旋转镜阵列的多个第一倾斜镜中的至少两个倾斜镜可以具有相同的倾斜角。
12.在第一可旋转镜阵列的多个第一倾斜镜当中,具有相同的倾斜角的至少两个倾斜
镜可以彼此面对。
13.lidar装置在仰角方向上的扫描通道的数量可以是第一可旋转镜阵列的多个第一倾斜镜的倾斜角的数量与第二可旋转镜阵列的多个第二倾斜镜的倾斜角的数量的乘积。
14.多个光源当中的两个相邻光源之间的角度可以是第二可旋转镜阵列的多个第二倾斜镜当中的两个相邻倾斜镜之间的角度的一半。
15.第二可旋转镜阵列的多个第二倾斜镜包括具有第一倾斜角的第一倾斜镜、具有第二倾斜角的第二倾斜镜、具有第三倾斜角的第三倾斜镜、以及具有第四倾斜角的第四倾斜镜,并且第一倾斜角、第二倾斜角、第三倾斜角和第四倾斜角可以彼此不同。
16.多个光源可以包括在圆周方向上以45度的间隔顺序地布置在225度的角度范围内的第一光源、第二光源、第三光源、第四光源和第五光源。
17.在第二可旋转镜阵列旋转时,在第一光源、第三光源和第五光源面对第二镜阵列的第一倾斜镜至第四倾斜镜中的任一个的第一模式下,第一光源、第三光源和第五光源可以顺序地发射光,并且在第二光源和第四光源面对第二可旋转镜阵列的第一倾斜镜至第四倾斜镜中的任一个的第二模式下,第二光源和第四光源可以顺序地发射光。
18.第一可旋转镜阵列的多个第一倾斜镜包括具有第五倾斜角的第五倾斜镜、具有第六倾斜角的第六倾斜镜、具有第七倾斜角的第七倾斜镜、具有第八倾斜角的第八倾斜镜、具有第五倾斜角的第九倾斜镜、具有第六倾斜角的第十倾斜镜、具有第七倾斜角的第十一倾斜镜、以及具有第八倾斜角的第十二倾斜镜,并且第五倾斜角、第六倾斜角、第七倾斜角和第八倾斜角彼此不同。
19.第二可旋转镜阵列可以被构造为连续地旋转,并且第一可旋转镜阵列被构造为以45度为单位逐步旋转。
20.在第一可旋转镜阵列停止时,第二可旋转镜阵列可以旋转360度,并且在第一可旋转镜阵列旋转一步时,第二可旋转镜阵列可以旋转90度。
21.lidar装置还可以包括:多个中间镜,设置在多个区间中,以将从多个光源发射的光反射到第一可旋转镜阵列。
22.多个光源中的若干光源可以在径向方向上布置在多个区间的每个区间内。
23.在径向方向上布置在每个区间内的光源可以以不同角度倾斜。
24.lidar装置还可以包括:多个楔形棱镜,多个楔形棱镜中的每一个被构造为改变从在径向方向上布置在每个区间内的若干光源发射的光的光行进方向,从而使得光以不同角度入射在对应的中间镜上。
25.lidar装置在仰角方向上的扫描通道的数量可以是在径向方向上布置在多个区间中的每个区间内的若干光源的数量、第一可旋转镜阵列的多个第一倾斜镜的倾斜角度的数量、以及第二可旋转镜阵列的多个第二倾斜镜的倾斜角的数量的乘积。
26.多个中间镜中的每一个可以包括其中倾斜角通过电控制而被调节的反射面。
27.第一可旋转镜阵列的多个第一倾斜镜的反射面可以具有不同的径向位置,使得从多个光源之中的相同光源发射的光和由第一可旋转镜阵列的多个第一倾斜镜反射的光入射在第二可旋转镜阵列上的相同位置处。
28.第一可旋转镜阵列的多个第一倾斜镜可以是具有倾斜面的多个直角棱镜,并且多个直角棱镜可以具有相同的高度和不同的基底长度。
29.在方位角方向上的视角可以为约180度至约270度,并且在仰角方向上的视角可以为约30度至约60度。
30.lidar装置还可以包括:凹面镜,反射由第二可旋转镜阵列反射的光并将光会聚在焦点上。
31.光电检测器,可以在凹面镜的焦点上。
32.lidar装置还可以包括:平面镜,通过将由凹面镜反射的光朝光电检测器反射,延伸在凹面镜与光电检测器之间的光路;带通滤波器,设置在平面镜与光电检测器之间,带通滤波器被构造为仅透射多个光源的发射波段中的光;以及透镜,将光聚焦在光电检测器上。
33.lidar装置还可以包括包含所述光电检测器在内的多个光电检测器,该多个光电检测器沿圆周方向布置。
34.多个光电检测器的数量可以等于多个光源的数量。
35.lidar装置还可以包括:掩模,设置在光电检测器的光接收面上并具有与多个光电检测器相对应的多个开口。
36.多个光电检测器中的每一个可以是在径向方向上延伸的一维传感器阵列。
37.根据另一示例实施例的一方面,提供了一种光检测和测距(lidar)装置,包括:多个光源阵列,多个光源阵列中的每一个包括在竖直方向上布置的多个光源;多个第一镜阵列,多个第一镜阵列中的每一个包括被布置为在竖直方向上具有抛物线形状的多个镜,多个镜分别面对多个光源。第二可旋转镜阵列,包括在圆周方向上布置的多个倾斜镜,并且被构造为将由多个第一镜阵列反射的光反射到lidar装置的外部;以及光电检测器,被构造为检测在从lidar装置的外部入射到第二可旋转镜阵列之后被第二可旋转镜阵列反射的光,其中,多个光源阵列和多个第一镜阵列分别设置在通过在圆周方向上以相等间隔划分180度或更大的角度范围所得的多个区间中。
38.根据另一实施例的一方面,提供了一种光检测和测距(lidar)装置,包括:多个光源,被构造为发射光;光电检测器,被构造为检测光;第一镜阵列,具有第一截顶棱锥形状并反射从多个光源入射的光;以及第二镜阵列,具有第二截顶棱锥形状并布置为在lidar装置的竖直方向上与第一镜阵列相对,第二镜阵列将从第一镜阵列入射的光反射到lidar装置的外部,并且反射从lidar装置的外部入射的光从而使光行进到光电检测器,其中,第一镜阵列可以沿lidar装置的竖直方向设置在第二镜阵列与光电检测器之间,以及其中,多个光源可以沿lidar装置的与竖直方向垂直的水平面的圆周布置。
39.多个光源可以沿lidar装置的水平面的圆周布置在180度或更大的角度范围中。
40.第一镜阵列可以被构造为连续地旋转,并且第二镜阵列可以被构造为离散地旋转。
附图说明
41.通过参考附图来描述某些示例实施例,上述和/或其他方案将变得更清楚,在附图中:
42.图1是根据示例实施例的光检测和测距(lidar)装置的视图;
43.图2是根据示例实施例的图1中所示的lidar装置的光接收单元的附加构造的截面图;
44.图3是根据示例实施例的图1中所示的lidar装置的第二镜阵列的构造的平面图;
45.图4a是第二镜阵列的第一倾斜镜和第三倾斜镜在竖直方向上截取的截面图,图4b是根据示例实施例的第二镜阵列的第二倾斜镜和第四倾斜镜在竖直方向上的截面图;
46.图5a是根据示例实施例的第一镜阵列的构造的平面图;
47.图5b是根据另一示例实施例的第一镜阵列的构造的平面图;
48.图6是示出了根据示例实施例的第二镜阵列与多个光源之间的布置关系的视图;
49.图7a和图7b是示出了根据示例实施例的扫描模式根据第二镜阵列的旋转而变化的视图;
50.图8是根据示例实施例的入射在第二镜阵列的一个倾斜镜上的发射光和接收光的视图;
51.图9是示出了根据示例实施例的接收光与倾斜镜之间的相对位置关系的视图,该接收光是由在第二镜阵列旋转时在一个角度区间内在不同方向上扫描的发射光引起的。
52.图10是示出了根据示例实施例的第一镜阵列的顺序步进驱动的视图;
53.图11是根据示例实施例的连续旋转的第二镜阵列的多个区域的视图;
54.图12是示出了根据示例实施例的根据第一镜阵列和第二镜阵列的旋转的相对位置的变化的视图;
55.图13是根据示例性实施例的根据第一镜阵列与第二镜阵列之间的相对位置的变化而形成的仰角方向上的多个竖直通道的视图;
56.图14是示出了根据示例实施例的以不同倾斜角发射光的多个光源的视图;
57.图15是示出了图14中所示的示例实施例中的第二镜阵列与多个光源之间的布置关系的示图;
58.图16是根据图14中所示的示例实施例中的第一镜阵列与第二镜阵列之间的相对位置的变化而形成的仰角方向上的多个竖直通道的视图;
59.图17至图19是示出了根据各种示例实施例的在不倾斜地布置光源的情况下对从光源发射的光的倾斜角进行复用的视图;
60.图20是根据示例实施例的构造的视图,在该构造中,由第一镜阵列的多个倾斜镜反射的光入射在第二镜阵列上的不同位置上;
61.图21是根据示例实施例的构造的视图,在该构造中,由第一镜阵列的多个倾斜镜反射的光入射在第二镜阵列上的相同位置处;
62.图22是根据另一示例实施例的第一镜阵列的构造的视图;
63.图23是根据另一示例实施例的光接收单元的构造的截面图;
64.图24是根据示例实施例的图23中所示的光接收单元的掩模的结构的视图;
65.图25是根据示例实施例的图23中所示的光电检测器阵列的构造的视图;以及
66.图26是根据另一示例实施例的光接收单元的光电检测器阵列的构造的视图。
具体实施方式
67.下面参考附图更详细地描述示例实施例。
68.在以下描述中,即使在不同附图中,类似的附图标记也用于类似的元件。提供描述中定义的内容(例如详细构造和元件)以帮助全面理解示例实施例。然而,应当清楚,即便在
缺少这些具体定义的内容的情况下,也能够实践示例实施例。此外,由于公知的功能或构造会以不必要的细节使描述模糊,因此没有对其进行详细地描述。
69.如本文所使用的,术语“和/或”包括相关列出项目中的一个或多个项目的任意和所有组合。称为
“……
中的至少一个”之类的表述在元件列表之后时修饰整个元件列表,而不是修饰列表中的单独元件。例如,表述“a、b和c中的至少一个”应该被理解为仅包括a、仅包括b、仅包括c、包括a和b两者、包括a和c两者、包括b和c两者、包括全部a、b和c或包括上述示例的任何变型。
70.在下文中,将参考附图来详细描述具有宽视角的光检测和测距(lidar)装置。
71.例如,当元件被称为在另一元件“上”或“上方”时,它可以直接在该另一元件上,或者也可以存在中间元件。本文中使用的单数形式“一”、“一个”和“该”也意在包括复数形式,除非上下文明确地另外指示。另外,将理解的是,当单元被称为“包括”另一元件时,除非明确相反地指出,否则它可以不排除该另一元件,而是还可以包括该另一元件。
72.术语“一”、“一个”和“该”以及相似指代词的使用应被解释为涵盖单数和复数两种情况。除非明确地声明或与构成方法的操作顺序相矛盾,否则可以以适当的顺序执行这些操作,而不必限于所描述的顺序。
73.此外,诸如“...单元”、“...模块”的术语表示用于执行至少一个功能或操作的单元,并且这些单元可以被实现为硬件或软件或者硬件和软件的组合。
74.所呈现的各个附图中示出的连接线或连接器意在表示各个元件之间的示例性功能关系和/或物理或逻辑耦接。应该注意,在实际设备中可以存在许多替代或者附加的功能关系、物理连接或逻辑连接。
75.除非另外要求,否则本文中所提供的任何和所有示例或示例性语言(例如,“诸如”)的使用仅旨在更好地阐明本发明构思,并且不对本发明构思的范围构成限制。
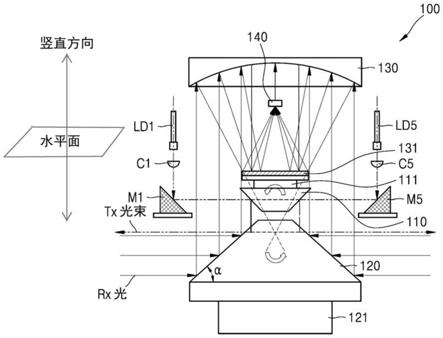
76.图1是根据示例实施例的光检测和测距(lidar)装置100的视图。参考图1,lidar装置100可以包括:第一镜阵列110和第二镜阵列120,被布置为在lidar装置100的竖直方向上彼此面对;多个光源ld1和ld5,朝第一镜阵列110发射光;以及光接收单元,包括元件130、131和140,以检测来自外部的被外部物体反射的光。
77.第一镜阵列110可以具有多边形截头锥体(例如,正方形截头锥体、五边形截头锥体、六边形截头锥体、八边形圆锥体等)或截顶棱锥(例如,截顶正方形棱锥、截顶五边形棱锥、截顶六边形棱锥、截顶八边形棱锥等)的形状。第一镜阵列110可以包括多个倾斜镜,该多个倾斜镜是在lidar装置100的与竖直方向垂直的水平面的圆周方向上布置的。例如,当从第一镜阵列110的顶部观察时,第一镜阵列110可以是多边形镜,并且第一镜阵列110的基底可以具有多边形形状。第一镜阵列110可以绕旋转轴旋转。为此,lidar装置100还可以包括使第一镜阵列110旋转的第一电动机111。
78.第二镜阵列120被布置为面对第一镜阵列110,以将由第一镜阵列110反射的光反射到lidar装置100的外部。类似于第一镜阵列110,第二镜阵列120也可以包括在圆周方向上布置的多个倾斜镜。例如,第二镜阵列120也可以是多边形镜。另外,第二镜阵列120可以绕旋转轴旋转。为此,lidar装置100还可以包括使第二镜阵列120旋转的第二电动机121。第一镜阵列110和第二镜阵列120可以被布置为绕同一轴旋转。
79.尽管在图1的截面图中仅示出了两个光源ld1和ld5,但是在圆周方向上可以以规
则的间隔布置其他光源。光源ld1和ld5均可以被构造为在处理器的控制下以规则的时间间隔发射脉冲光。另外,光源ld1和ld5可以被构造为发射人眼不可见的红外频带的光。例如,光源ld1和ld5可以被构造为发出具有选自从约800nm到约2,000nm的范围内的波段的光。光源ld1和ld5可以是例如脉冲激光二极管,但是不限于此。在将发射波长控制在容许范围内时,发光二极管led可以用作光源ld1和ld5。
80.lidar装置100还可以包括多个准直透镜c1和c5,该多个准直透镜将从光源ld1和ld5发射的光变成平行光束。lidar装置100还可以包括多个中间镜m1和m5,该多个中间镜将从光源ld1和ld5发射的光反射到第一镜阵列110。中间镜m1和m5可以布置在光源ld1和ld5与第一镜阵列110之间的光路上。光源ld1和ld5与第一镜阵列110之间的光路可以通过中间镜m1和m5而弯曲90度。然而,可以省略中间镜m1和m5,并且光源ld1和ld5可以被布置为直接面对第一镜阵列110而没有中间镜m1和m5。
81.从光源ld1和ld5发射的光被第一镜阵列110反射并入射在第二镜阵列120上。然后,可以通过第二镜阵列120的旋转将光扫描到lidar装置100的外部作为发射光。发射光的一部分可以被外部物体反射,并且作为接收光返回到lidar装置100。从外部返回到lidar装置100的接收光可以被第二镜阵列120反射回来并传输到光接收单元。
82.lidar装置100的光接收单元可以包括:凹面镜130,反射由第二镜阵列120反射的从外部返回的接收光,并且将该接收光会聚到焦点上;以及光电检测器140,位于凹面镜130的焦点上。由第二镜阵列120反射的接收光直接入射到凹面镜130上,而不穿过第一镜阵列110。为此,第二镜阵列120的直径可以大于第一镜阵列110的直径,并且凹面镜130的直径可以与第二镜阵列120的直径相似或大于第二镜阵列120的直径。另外,凹面镜130的反射面可以被布置为面对第二镜阵列120,并且第一镜阵列110可以在凹面镜130与第二镜阵列120之间。通过使用凹面镜130,从各个外部方向入射在第二镜阵列120上的接收光可以传输到一个光电检测器140。
83.lidar装置100还可以包括平面镜131,该平面镜将由凹面镜130反射的接收光的光路折叠约180度。当凹面镜130的焦距较长时,平面镜131可以通过将接收光的光路折叠约180度来减小lidar装置100的体积。为此,可以将平面镜131布置在通过将由凹面镜130反射的光朝光电检测器140反射,来延伸凹面镜130与光电检测器140之间的光路的位置。更详细地,平面镜131可以在凹面镜130与第一镜阵列110之间,并且具体地,可以在第一镜阵列110的上表面上。平面镜131的直径小于凹面镜130的直径。由第二镜阵列120和凹面镜130顺序反射的接收光可以由平面镜131反射,然后聚焦在光电检测器140上。
84.为了方便起见,图1仅示出了在凹面镜130与平面镜131的焦点之间的光电检测器140,但是lidar装置100还可以包括除光电检测器140之外的附加组件。例如,图2是示出了图1中所示的lidar装置100的光接收单元的附加构造的截面图。参考图2,lidar装置100的光接收单元还可以包括布置在平面镜131与光电检测器140之间的带通滤波器132和透镜133。带通滤波器132通过仅透射波段与从光源ld1和ld5发射的光的波段相同的光来去除噪声。透镜133进一步将光聚焦在光电检测器140上。在进一步布置透镜133时,光电检测器140可以在由凹面镜130和透镜133形成的焦点上。
85.图3是图1中所示的lidar装置100的第二镜阵列120的构造的平面图。参考图3,第二镜阵列120可以具有截顶正方形棱锥形状,其中,在平行于基底的方向上切割了顶点。因
此,第二镜阵列120可以具有四个倾斜面,并且可以包括分别形成在四个倾斜面上的四个倾斜镜f1、f2、f3和f4。另外,为了减小第二镜阵列120的体积和重量,可以进一步切割基底的不被光学使用的四个角部。
86.图4a是第二镜阵列120的第一倾斜镜f1和第三倾斜镜f3在竖直方向上截取的截面图,图4b是根据示例实施例的第二镜阵列120的第二倾斜镜f2和第四倾斜镜f4在竖直方向上的截面图。如图4a和图4b中所示,第二镜阵列120的四个倾斜镜f1、f2、f3和f4可以具有不同的倾斜角。第一倾斜镜f1可以具有第一倾斜角α1,第二倾斜镜f2可以具有与第一倾斜角α1不同的第二倾斜角α2,第三倾斜镜f3可以具有与第一倾斜角α1和第二倾斜角α2不同的第三倾斜角α3,并且第四倾斜镜f4可以具有与第一倾斜角至第三倾斜角α1、α2和α3不同的第四倾斜角α4。
87.图3示出了第二镜阵列120具有截顶四边形棱锥形状,该截顶四边形棱锥形状在第二镜阵列120的侧面具有四个倾斜镜,但是这仅是示例性的,并且第二镜阵列120的形状不限于此。例如,第二镜阵列120可以具有截顶五边形棱锥形状,该截顶五边形棱锥形状具有五个倾斜镜,或者可以具有截顶六边形棱锥形状,该截顶六边形棱锥形状具有六个倾斜镜。图3示出了第二镜阵列120的底部基底和顶部基底分别具有八边形形状和正方形形状,但是第二镜阵列120的底部基底和顶部基底可以具有其他不同的形状。
88.图5a是根据示例实施例的第一镜阵列110的构造的平面图。参考图5a,第一镜阵列110可以具有截顶多边形棱锥形状,在该形状中,在平行于基底的方向上切割了顶点。具体地,第一镜阵列110的侧面的数量可以是第二镜阵列120的侧面的数量的倍数。例如,当第二镜阵列120是截顶正方形棱锥时,第一镜阵列110可以具有截顶八边形棱锥形状或截顶十二边形棱锥形状。图5a示出了第一镜阵列110具有截顶八边形棱锥形状的示例。在这种情况下,第一镜阵列110可以具有8个倾斜面,并且可以包括分别形成在该8个倾斜面上的8个倾斜镜a1、a2、a3和a4。因此,第一镜阵列110的倾斜镜a1、a2、a3和a4的数量是第二镜阵列120的倾斜镜f1、f2、f3和f4的数量的倍数。
89.另外,第一镜阵列110的倾斜镜a1、a2、a3和a4可以具有不同的倾斜角。例如,第一镜阵列110可以包括具有第五倾斜角的两个第一倾斜镜a1、具有与第五倾斜角不同的第六倾斜角的两个第二倾斜镜a2、具有与第五倾斜角和第六倾斜角不同的第七倾斜角的两个第三倾斜镜a3、以及具有与第五倾斜角至第七倾斜角不同的第八倾斜角的两个第四倾斜镜a4。因此,第一镜阵列110可以包括至少两个倾斜镜,该至少两个倾斜镜具有相同的倾斜角。当第一镜阵列110具有截顶八边形棱锥形状时,在第一镜阵列110的多个倾斜镜a1、a2、a3和a4当中,具有相同倾斜角的两个倾斜镜可以被布置为彼此面对。
90.图5b是根据另一示例实施例的第一镜阵列110的构造的平面图。参考图5b,第一镜阵列110可以具有截顶十二边形棱锥形状。在这种情况下,第一镜阵列110可以具有12个倾斜面,并且可以包括分别形成在12个倾斜面上的12个倾斜镜a1、a2和a3。第一镜阵列110的倾斜镜a1、a2和a3可以具有不同的倾斜角。例如,第一镜阵列110可以包括具有第五倾斜角的四个第一倾斜镜a1、具有与第五倾斜角不同的第六倾斜角的四个第二倾斜镜a2、以及具有与第五倾斜角和第六倾斜角不同的第七倾斜角的四个第三倾斜镜a3。
91.图5a和图5b仅是各种第一镜阵列110的一些示例,并且第一镜阵列110可以被构造为与图5a和图5b不同。例如,当第一镜阵列110具有截顶十二边形棱锥形状时,第一镜阵列
110可以包括具有不同倾斜角的四种类型的倾斜镜,并且可以在每种类型中布置具有相同倾斜角的三个倾斜镜。备选地,当第一镜阵列110具有截顶十二边形棱锥形状时,第一镜阵列110可以包括具有不同倾斜角的六种类型的倾斜镜,并且可以每种类型中布置具有相同倾斜角的两个倾斜镜。另外,当第二镜阵列120具有五边形形状时,第一镜阵列110可以具有截顶十边形棱锥形状。
92.图5b中所示的每个圆圈示例性地示出了入射在第一镜阵列110上的发射光的光束直径。在构造第一镜阵列110时,可以考虑发射光的光束直径。例如,第一镜阵列110可以被构造为使得第一镜阵列110的倾斜镜中的每一个的宽度不小于在发射光入射在倾斜镜上的位置处的发射光的光束直径。
93.图6是示出了第二镜阵列120与多个光源之间的布置关系的视图。参考图6,多个光源ld1、ld2、ld3、ld4和ld5可以被分别布置在通过在圆周方向上以相等间隔划分180度或更大的角度范围所得的多个区间中。例如,当第二镜阵列120具有截顶正方形棱锥形状时,五个光源ld1、ld2、ld3、ld4和ld5可以在圆周方向上以45度的间隔顺序地布置在225度的角度范围内。另外,可以在圆周方向上以45度的间隔顺序地布置五个中间镜m1、m2、m3、m4和m5,以将从五个光源ld1、ld2、ld3、ld4和ld5发射的光反射到第一镜阵列110。当第二镜阵列120具有截顶六边形棱锥形状时,九个光源可以在圆周方向上以30度的间隔顺序地布置在270度的角度范围内。
94.因此,多个光源当中的两个相邻光源之间的角度可以是第二镜阵列120的多个倾斜镜当中的两个相邻倾斜镜之间的角度的一半。例如,当第二镜阵列120具有截顶正方形棱锥形状时,两个相邻倾斜镜之间的角度为90度,并且多个光源以45度的间隔进行布置。当第二镜阵列120具有截顶六边形棱锥形状时,两个相邻倾斜镜之间的角度为60度,并且多个光源以30度的间隔进行布置。
95.通过以这种方式布置多个光源,可以在方位角方向上确保180度或更大的宽角度范围内的水平视角。在第二镜阵列120旋转时,从每个光源发射的光不在方位角方向上的整个视角范围内被扫描,而是仅在布置有各个光源的角度区间内被扫描。例如,在以45度的角度布置五个光源时,从每个光源发射的光在光源周围-22.5至 22.5度的范围内被扫描。此外,在以30度的角度布置九个光源时,从每个光源发射的光在光源周围-15至 15度的范围内被扫描。
96.然而,因为在水平视角范围内光源的数量大于第二镜阵列120的倾斜镜的数量,所以从所有光源发出的光不会同时被第二镜阵列120的倾斜镜扫描。因此,可以通过分为两个模式来执行方位角方向上的扫描操作。例如,图7a和图7b示例性地示出了扫描模式根据第二镜阵列120的旋转而变化。
97.参考图7a,在第一模式下,第一光源ld1、第三光源ld3和第五光源ld5分别面对第二镜阵列120的第一倾斜镜f1、第四倾斜镜f4和第三倾斜镜f3,并且第二光源ld2和第四光源ld4面对两个相邻倾斜镜之间的边界。在这种情况下,第二光源ld2和第四光源ld4处于关闭状态,并且第一光源ld1、第三光源ld3和第五光源ld5交替且顺序地发光。然后,从第一光源ld1、第三光源ld3和第五光源ld5发射的光在方位角方向上被扫描。
98.在图7a中所示的示例中,从第一光源ld1发射的光l1可以被第一倾斜镜f1扫描。另外,从第三光源ld3发射的光l3可以被第四倾斜镜f4扫描,并且从第五光源ld5发射的光l5
可以被第三倾斜镜f3扫描。然而,这只是示例,用于扫描从第一光源ld1、第三光源ld3和第五光源ld5发射的光l1、l3和l5的倾斜镜可以随着第二镜阵列120的旋转而改变。
99.当面对每个光源的倾斜镜的镜面与每个光源间的角度达到-22.5度内时,第一光源ld1、第三光源ld3和第五光源ld5交替且重复地开始发射光。例如,在第二镜阵列120旋转时,在第一光源ld1即时发射脉冲光之后,第三光源ld3即时发射脉冲光,然后第五光源ld5即时发射脉冲光。然后,第一光源ld1再次即时发射脉冲光。同时,当第二镜阵列120旋转且面对每个光源的倾斜镜的镜面与每个光源之间的角度超过 22.5度时,第一模式终止。第一光源ld1、第三光源ld3和第五光源ld5关闭。因此,从第一光源ld1、第三光源ld3和第五光源ld5中的每一个发射的光在布置有每个光源的45度的角度范围的区间内的方位角方向上被扫描。
100.参考图7b,在第二模式下,第二光源ld2和第四光源ld4面对第二镜阵列120的第一倾斜镜f1和第四倾斜镜f4,并且第一光源ld1、第三光源ld3和第五光源ld5面对两个相邻倾斜镜之间的边界。在这种情况下,第一光源ld1、第三光源ld3和第五光源ld5处于关闭状态,并且第二光源ld2和第四光源ld4交替且顺序地发射光。从第二光源ld2和第四光源ld4中的每一个发射的光在布置有每个光源的45度的角度范围的区间内的方位角方向上被扫描。以此方式,lidar装置100总体上可以具有225度的水平视角。
101.图7a和图7b示出了第二镜阵列120具有截顶四边形棱锥形状的情况,但是即使当第二镜阵列120具有不同的形状时,也可以使用相同的原理来执行方位角方向上的扫描。例如,当第二镜阵列120具有截顶六边形棱锥形状且布置了九个光源时,在第一模式下,五个奇数光源交替且顺序地发射光,并且在第二模式下,四个偶数光源可以交替且顺序地发射光。
102.另一方面,在图7a和图7b中,虚线圆圈表示从外部物体反射回来的接收光r1、r2、r3、r4和r5。通过第二镜阵列120的相同倾斜镜同轴地执行光的发送和接收。例如,当从第一光源ld1发射的光l1被第一倾斜镜f1扫描时,从外部物体反射回来的接收光r1可以入射在第一倾斜镜f1上。向外部发射的光l1、l2、l3、l4和l5入射在倾斜镜上,而接收光r1、r2、r3、r4和r5入射在同一倾斜镜上的位置可以不同。例如,向外部发射的光l1、l2、l3、l4和l5可以入射在倾斜镜的上部而不是中心上。这可以通过第一镜阵列110的尺寸来调节。在这种情况下,接收光r1、r2、r3、r4和r5可以入射在倾斜镜的下部上。
103.图8是入射在第二镜阵列120的一个倾斜镜上的发射光和接收光的视图。如上所述,发射光tx入射在第二镜阵列120的倾斜镜的上部上,而接收光rx入射在同一倾斜镜的下部上。接收光rx的光束直径可以大于发射光tx的光束直径。例如,发射光tx的光束直径可以约为5.5mm,而接收光rx可以具有约20mm或更大的入射光瞳直径(epd)。通过使发射光tx入射在倾斜镜的几乎上边缘上,具有较大直径的接收光rx的入射位置相对于发射光tx的入射位置偏移。通过使发射光tx和接收光rx相对于彼此偏移,可以使发射光tx和接收光rx之间的光学干涉最小。
104.图9示例性地示出了在第二镜阵列120旋转时,在一个角度区间内在不同方向上扫描的多束发射光所引起的多束接收光之间的相对位置关系。根据第二镜阵列120的旋转,发射光可以投射在左、中或右方向上。当发射光txc朝倾斜镜的中心投射时,接收光rxc入射在倾斜镜的中心上。当在从第二镜阵列120的上方观看的情况下发射光tx1投射在倾斜镜的左
方向上时,接收光rxl可以入射在倾斜镜的左边缘上。另外,当在从第二镜阵列120上方观看的情况下发射光txr投射在倾斜镜的右方向上时,接收光rxr可以入射在倾斜镜的右边缘上。因为倾斜镜的下部具有比倾斜镜的上部大的面积,所以epd增加的接收光rxl、rxc和rxr可以充分地入射在倾斜镜的区域rx'上。
105.通过旋转第二镜阵列120,可以以上述方式在方位角方向上执行扫描。可以通过第一镜阵列110与第二镜阵列120的组合来执行仰角方向上的扫描。因为第一镜阵列110的倾斜镜具有多个不同的倾斜角且第二镜阵列120的倾斜镜具有多个不同的倾斜角,所以根据入射有光的第一镜阵列110的倾斜镜与第二镜阵列120的倾斜镜的组合,光可以在不同的仰角方向上行进。仰角方向上的扫描通道的数量由第一镜阵列110的多个倾斜镜的倾斜角的数量与第二镜阵列120的多个倾斜镜的倾斜角的数量的乘积给出。例如,当第一镜阵列110具有四个不同倾斜角且第二镜阵列120具有四个不同倾斜角时,可以在仰角方向上形成16个扫描通道。竖直视角由(仰角方向-1上的扫描通道的数量)
×
(竖直角分辨率)给出。
106.第一镜阵列110和第二镜阵列120可以以不同的转速连续旋转,使得第一镜阵列110的多个倾斜角和第二镜阵列120的多个倾斜角可以均匀地组合。备选地,第一镜阵列110可以被逐步驱动,而第二镜阵列120可以连续旋转。例如,在第一镜阵列110停止的同时第二镜阵列120旋转360度之后,第一镜阵列110可以在第一镜阵列110的两个相邻倾斜镜之间旋转一定角度。在这种情况下,使第一镜阵列110旋转的第一电动机111可以是步进电动机。
107.图10示例性地示出了第一镜阵列110的顺序步进驱动。图10示例性地示出了第一镜阵列110具有截顶八边形棱锥形状,该截顶八边形棱锥形状具有八个倾斜镜。在这种情况下,第一镜阵列110可以在顺时针方向上逐步或离散地旋转45度。例如,第一镜阵列110可以在八步期间旋转360度。因为在第一镜阵列110中对称地布置了具有相同倾斜角的两个倾斜镜,所以当第一镜阵列110在四步期间旋转半圈时,可以完成一帧的仰角方向上的扫描。尽管图10示出了第一镜阵列110顺时针旋转,但是也可以逆时针旋转。
108.图11示例性地示出了第二镜阵列120的连续旋转的多个区域。参考图11,当第二镜阵列120顺时针旋转时,从
①
到
⑧
的区域依次面对第一镜阵列110的倾斜镜。备选地,当第二镜阵列120逆时针旋转时,从
①
到
②
的区域依次面对第一镜阵列110的倾斜镜。
109.然而,因为在第二镜阵列120旋转一次之后第一镜阵列110步进到下一位置的同时,第二镜阵列120继续旋转,所以第一镜阵列110的倾斜镜的位置和第二镜阵列120的倾斜镜的位置可以不完全相同。因此,可以将适当的时间延迟应用于第一镜阵列110的步进驱动和停止操作,使得第二镜阵列120相对于第一镜阵列110旋转90度,同时第一镜阵列110执行一个步进驱动。例如,第二镜阵列120在第一镜阵列110停止时旋转360度,第二镜阵列120可以在第一镜阵列110步进到下一位置时旋转90度,并且第二镜阵列120可以在第一镜阵列110再次停止时旋转360度。然后,在执行一帧的仰角方向扫描时,第一镜阵列110可以旋转半圈且第二镜阵列120可以旋转5圈。
110.图12示例性地示出了根据第一镜阵列110和第二镜阵列120的旋转的相对位置的变化。首先,第二镜阵列120的从
①
到
⑧
的区域在第二镜阵列120旋转360度时依次面对第一镜阵列110的第一倾斜镜a1。此后,在第一镜阵列110步进到下一位置时,第二镜阵列120从区域
①
旋转到区域
②
。另外,第二镜阵列120的区域
③
到
②
在第二镜阵列120旋转360度时依次面对第一镜阵列110的第二倾斜镜a2。在第一镜阵列110步进到下一位置时,第二镜阵列
120从区域
③
旋转到区域
④
。然后,第二镜阵列120的区域
⑤
到
④
在第二镜阵列120旋转360度时依次面对第一镜阵列110的第三倾斜镜a3。在第一镜阵列110步进到下一位置时,第二镜阵列120从区域
⑤
旋转到区域
⑥
。然后,第二镜阵列120的区域
⑦
到
⑥
在第二镜阵列120旋转360度时依次面对第一镜阵列110的第四倾斜镜a4。最后,在第一镜阵列110步进到下一位置时,第二镜阵列120从区域
⑦
旋转到区域
⑧
以完成一帧。
111.图13示例性地示出了根据第一镜阵列110与第二镜阵列120之间的相对位置的变化而形成的仰角方向上的多个竖直通道。在图10至图12中所示的情况下,可以在仰角方向上形成16个扫描通道。假设第一镜阵列110的倾斜镜光学上具有-3度、-1度、 1度和 3度的倾斜角,并且第二镜阵列120的倾斜镜光学上具有-12度、-4度、 4度和 12度的倾斜角,那么可以在从-15度到 15度的范围内以2度间隔进行每个仰角方向上的扫描。因此,竖直视角可以为30度。在此,倾斜角表示基于45度增加或减少的角度。
112.为了便于描述,示出了参考图10至图13描述的第一镜阵列110和第二镜阵列120的构造。在不同地选择第一镜阵列110和第二镜阵列120的构造时,仰角方向上的扫描通道的数量、竖直视角的范围、第二镜阵列120在一帧期间的旋转数等可以不同。此外,在图13中,例示了第二镜阵列120的倾斜镜的倾斜角大于第一镜阵列110的倾斜镜的倾斜角,但是不限于此。
113.图14示例性地示出了包括以不同倾斜角发射光的多个光源的示例实施例。为了进一步增加仰角方向上的扫描通道的数量,可以对从光源入射在第一镜阵列110上的光的入射角进行复用。换言之,光可以以多个不同的倾斜角入射在第一镜阵列110上。为此,如图14中所示,多个光源ld11、ld12和ld13可以在径向方向上布置在方位角方向上的一个角度区间内。在径向方向上布置在一个角度区间内的多个光源ld11、ld12和ld13可以以不同角度倾斜。从多个光源ld11、ld12和ld13发射的光穿过对应的准直透镜c11、c12和c13,并且以不同角度入射在一个中间镜m1上。然后,由中间镜m1反射的光以不同角度入射在第一镜阵列110上。结果,可以由第二镜阵列120在仰角方向上以不同角度扫描从多个光源ld11、ld12和ld13发射的光。
114.图15示例性地示出了图14中所示的示例实施例中的第二镜阵列120与多个光源之间的布置关系。参考图15,当第二镜阵列120具有截顶正方形棱锥形状时,多个光源可以在径向方向上布置在五个角度范围内,该五个角度范围是在圆周方向上以45度的间隔分别布置的。例如,多个光源ld11、ld12、ld13在径向方向上布置在第一角度区间中,并且多个光源ld11、ld12和ld13以不同角度倾斜。此外,多个光源ld21、ld22和ld23在径向方向上布置在第二角度区间中,并且多个光源ld21、ld22、ld23以不同角度倾斜。类似地,在第三角度区间至第五角度区间内,可以在径向方向上布置以不同角度倾斜的多个光源ld31、ld32和ld33、多个光源ld41、ld42和ld43、以及多个光源ld51、ld52和ld53。图14和图15示出了在一个角度区间内布置三个光源,这只是示例,并且本公开不限于此。
115.当多个光源在一个角度区间内以不同角度倾斜时,仰角方向上的扫描通道的数量由以不同角度倾斜的光源数量、第一镜阵列110的多个倾斜镜的倾斜角的数量、以及第二镜阵列120的多个倾斜镜的倾斜角的数量的乘积给出。例如,图16示例性地示出了根据图14中所示的示例实施例中的第一镜阵列110与第二镜阵列120之间的相对位置的变化而形成的仰角方向上的多个竖直通道。在图16中,假设以不同角度倾斜的光源的数量为三个,第一镜
阵列110具有3个倾斜角,并且第二镜阵列120具有4个倾斜角。另外,假设三个光源的倾斜角在光学上为-12度、0度和 12度,第一镜阵列110的倾斜镜在光学上具有-4度、0度和 4度的倾斜角,并且第二镜阵列120的倾斜镜在光学上具有-1.5度、-0.5度、 0.5度和 1.5度的倾斜角。在此,倾斜角表示相对于竖直方向增加或减少的角度。在这种情况下,在仰角方向上的扫描通道的数量为36,并且可以在从-17.5度到 17.5度的范围中以1度的间隔进行仰角方向上的扫描。因此,竖直视角为35度。
116.在图14中,多个光源ld11、ld12和ld13被示出为倾斜,但是在这种情况下,组装和维护可能较为困难。图17至图19是示出了用于在不倾斜地布置光源的情况下对从光源发射的光的倾斜角进行复用的各种示例实施例的视图。
117.参考图17,彼此平行地布置一个角度区间中的多个光源ld11、ld12和ld13。为了对从平行布置的多个光源ld11、ld12和ld13发射的光的倾斜角进行复用,在多个光源ld11、ld12和ld13之中,可以在光源ld11和ld13中的一些与中间镜m1之间的光路上布置楔形棱镜p11和p13。两个楔形棱镜p11和p13可以将光行进方向改变为不同角度。楔形棱镜p11和p13可以具体地布置在准直透镜c11和c13与中间镜m1之间的光路上。此外,在多个光源ld11、ld12和ld13之中,可以不在光源ld12中的一些与中间镜m1之间的光路上布置楔形棱镜。上述构造可以应用于布置在图15中所示的所有其他的角度区间中的光源ld21、ld22、ld23;ld31、ld32、ld33;ld41、ld42、ld43;ld51、ld52和ld53。
118.参考图18,中间镜m1可以包括其中倾斜角通过电控制而被调节的反射面s1。例如,中间镜m1的反射面s1可以由微机电系统(mems)组成。在这种情况下,在一个角度区间内可以仅布置一个光源ld1。从光源ld1发射的光可以根据中间镜m1的反射面s1的倾斜角的变化以各种角度入射在第一镜阵列110上。
119.参考图19,lidar装置可以不包括旋转的第一镜阵列110。替代地,lidar装置可以包括多个光源阵列la1和la5,其中每个阵列包括在竖直方向上布置的多个光源。尽管在图19中仅示出了两个光源阵列la1和la5,但是光源阵列可以分别布置在通过在圆周方向上以相等间隔划分180度或更大的角度范围而获得的多个角度区间内。例如,当第二镜阵列120具有截顶正方形棱锥形状时,五个光源阵列可以在圆周方向上以45度的间隔顺序地布置在225度的角度范围内。
120.第一光源阵列la1可以包括在竖直方向上延伸的支撑件sp1以及固定到支撑件sp1并在竖直方向上布置的多个光源ld11、ld12和ld13。同样,第五光源阵列la5还可以包括在竖直方向上延伸的支撑件sp5以及固定在支撑件sp5上并在竖直方向上布置的多个光源ld51、ld52和ld53。多个光源ld11、ld12和ld13以及ld51、ld52和ld53例如可以是垂直腔表面发射激光器(vcsel),并且可以被布置为在水平方向上发射光。从多个光源ld11、ld12和ld13以及ld51、ld52和ld53发射的光通过多个准直透镜c11、c12和c13以及c51、c52和c53变为平行光束。
121.lidar装置还可以包括多个镜阵列ma1和ma5,其中每个镜阵列包括在竖直方向上以抛物线形状布置以面对多个光源中的每一个的多个镜。尽管在图19中仅示出了两个镜阵列ma1和ma5,但是每个光源阵列可以布置在通过在圆周方向上以相等间隔划分180度或更大的角度范围而获得的多个角度区间内。例如,当第二镜阵列120具有截顶正方形棱锥形状时,五个镜阵列可以在圆周方向上以45度的间隔顺序地布置在225度的角度范围内。
122.第一镜阵列ma1对应于第一光源阵列la1。第一镜阵列ma1可以包括分别将从第一光源阵列la1的多个光源ld11、ld12和ld13发射的光反射到第二镜阵列120的多个镜m11、m12和m13。多个镜m11、m12和m13可以在竖直方向上被布置成抛物线形状。例如,在多个镜m11、m12和m13当中,镜被布置地越低,则其离多个光源ld11、ld12和ld13当中的对应光源可以越远。另外,第五镜阵列ma5对应于第五光源阵列la5。第五镜阵列ma5还可以包括分别将从第五光源阵列la5的多个光源ld51、ld52和ld53发射的光反射到第二镜阵列120的多个镜m51、m52和m53。入射在第二镜阵列120上的光的入射角可以被多个镜m11、m12和m13以及m51、m52和m53复用。
123.当第一镜阵列110的多个倾斜镜具有不同的倾斜角时,由第一镜阵列110的不同倾斜镜反射的光可以入射在第二镜阵列120的不同位置上。图20示例性地示出了由第一镜阵列110的多个倾斜镜反射的光入射在第二镜阵列120上的不同位置上的构造。参考图20,当第一镜阵列110或第二镜阵列120旋转时,由第一镜阵列110的不同倾斜镜反射的光顺序地入射在第二镜阵列120上。然而,当倾斜镜的倾斜角彼此不同时,光入射在第二镜阵列120上的不同位置上。在这种情况下,发射光入射的区域和接收光入射的区域可能在第二镜阵列120的倾斜镜上重叠。如图20中所示,当第一镜阵列110的多个倾斜镜上的光入射点在径向方向上的位置在第一镜阵列110旋转的同时保持恒定时,可以发生这种现象。
124.因此,第一镜阵列110的多个倾斜镜的反射面在径向方向上的位置可以彼此不同,使得从相同光源发射的光和由第一镜阵列110的多个倾斜镜反射的光入射在第二镜阵列120的相同位置。图21示例性地示出了由第一镜阵列110的多个倾斜镜反射的光入射在第二镜阵列120上的相同位置处的构造。参考图21,第一镜阵列110的多个倾斜镜a1、a2和a3在径向方向上的光入射点的位置可以彼此不同。另外,可以设置多个倾斜镜a1、a2和a3的倾斜角,使得光入射在第二镜阵列120上的相同位置处。然后,在第一镜阵列110或第二镜阵列120旋转时,光入射在第二镜阵列120的多个倾斜镜上的位置可以保持恒定。
125.图22是根据另一示例实施例的第一镜阵列110’的构造的视图。参考图22,第一镜阵列110’的多个倾斜镜可以包括多个直角棱镜113a、113b和113c。第一镜阵列110’还可以包括支撑多个直角棱镜113a、113b和113c的支撑板112。在这种情况下,第一镜阵列110’可以不是多边形镜。多个直角棱镜113a、113b和113c可以具有相同的高度和不同的基底长度。因此,多个直角棱镜113a、113b和113c可以具有不同的倾斜角。另外,多个直角棱镜113a、113b和113c上的光入射点在径向方向上的位置可以彼此不同。如参考图21所描述的,可以设置多个棱镜113a、113b和113c的倾斜角,使得光入射在第二镜阵列120上的相同位置处。
126.图23是根据另一示例实施例的光接收单元的构造的截面图。在图2中所示的光接收单元的情况下,描述了光电检测器140在由凹面镜130和透镜133形成的焦点上。在这种情况下,因为光从所有方向入射在光电检测器140上,所以噪声可能会增加。图23中所示的光接收单元可以在光的光行进方向上顺序地包括凹面镜130(参见图1)、平面镜131、带通滤光器132、两个透镜133和134、掩模135、光电检测器阵列141。透镜134可以在由凹面镜130和透镜133形成的焦点上,并且光电检测器阵列141可以在透镜134的焦点上。在这种情况下,从不同方向入射在第二镜阵列120上的光可以到达光电检测器阵列141上的不同位置。
127.图23示出了使用平面镜131作为将来自凹面镜130的光反射到光电检测器140的镜,但是不限于此。例如,为了增加或减少凹面镜130的有效焦距,代替平面镜131,可以在平
面镜131的位置处布置凸面镜或凹面镜。
128.图24示出了图23中所示的光接收单元的掩模135的示例性结构。掩模135通过限制入射在光电检测器阵列141上的光来抑制噪声。为此,掩模135可以包括光通过的多个开口。例如,当第二镜阵列120具有截顶正方形棱锥形状且五个光源在圆周方向上以45度的间隔顺序地布置时,掩模135可以包括在圆周方向上以45度的间隔顺序地布置的五个开口h1、h2、h3、h4和h5。布置在掩模135中的多个开口的数量和位置不限于此,并且可以根据光源的数量和位置而变化。
129.另外,图25示出了图23中所示的光电检测器阵列141的示例性构造。参考图25,光电检测器阵列141可以包括在围绕中心光轴的圆周方向上以规则的间隔布置的多个光电检测器。例如,当第二镜阵列120具有截顶正方形棱锥形状且五个光源在圆周方向上以45度的间隔顺序地布置时,光电检测器阵列141可以包括在圆周方向上以45度的间隔顺序地布置的五个光电检测器d1、d2、d3、d4和d5。布置在光电检测器阵列141中的多个光电检测器的数量和位置不限于此,并且可以根据光源的数量和位置而变化。光电检测器阵列141的光电检测器的数量可以与光源的数量相同,并且光电检测器的布置可以与光源的布置相似。
130.掩模135设置在光电检测器阵列141的光接收面上,并且掩模135的开口h1、h2、h3、h4和h5可以分别对应于光电检测器阵列141的多个光电检测器d1、d2、d3、d4和d5。因此,穿过掩模135的开口h1、h2、h3、h4和h5的光可以入射在光电检测器阵列141的对应的光电检测器d1、d2、d3、d4和d5上。
131.此外,从多个光源发射的通过第二镜阵列120的光在被外部物体反射之后,可以穿过掩模135的对应开口h1、h2、h3、h4和h5,并且可以入射在光电检测器阵列141的对应光电检测器d1、d2、d3、d4和d5上。因此,可以通过限制环境光来减少噪声并提高信噪比。
132.图26是根据另一示例实施例的光接收单元的光电检测器阵列141’的构造的视图。参考图26,光电检测器阵列141’可以包括多个一维传感器阵列da1、da2、da3、da4和da5,该一维传感器阵列在围绕中心光轴的圆周方向上以规则的间隔布置并在径向方向上延伸。如图14等中所示,当多个光源ld11、ld12和ld13在径向方向上布置在方位角方向上的一个角度区间内时,一维传感器阵列da1、da2、da3、da4和da5中的每一个可以检测从布置在对应角度区间内的多个光源ld11、ld12和ld13发射并以多个不同的倾斜角入射在第二镜阵列120上的光。
133.根据上述示例实施例,在方位角方向上,发射器被构造在以相等间隔划分180度或更大的角度范围所得的多个角度区间内,并且从每个发射器发射的光被对应角度区间内的第一镜阵列110和第二镜阵列120扫描。因此,可以确保180度或更大的水平视角。例如,方位角方向上的视角可以约为180度至约270度。另外,因为扫描是在相对较窄的角度区间内单独执行的,所以可以使由于第二镜阵列120的旋转引起的光束的几何变形和通过第一镜阵列110的光束的倾斜的影响最小化。
134.另外,根据所公开的示例实施例,因为通过对每个角度区间内的光源的倾斜角以及第一反射镜阵列110的多个倾斜镜和第二反射镜阵列120的多个倾斜镜的组合进行复用来形成多个竖直通道,所以可以在仰角方向上极大地增加竖直通道的数量。因此,可以确保30度或更大的竖直视角。例如,仰角方向上的视角可以为约30度至约60度。
135.根据上述示例实施例,在增加在方位角方向和仰角方向上的视角时,可以仅通过
控制第一镜阵列110和第二镜阵列120的旋转速度来实现约20hz或更高的高帧速率。
136.因为根据示例实施例的lidar装置具有宽的水平视角和竖直视角,所以lidar装置不仅可以在正面而且可以在侧面精确地检测物体,并且可以详细地检测天花板或地板的三维状态。
137.例如,这样的lidar装置可以安装在车辆上并被构造为提取前方车辆的距离和相对速度信息。然而,根据上述示例实施例的lidar装置不必仅适用于车辆。例如,除了车辆之外,lidar装置可以被安装在船、飞机或无人机上,并且用于搜索并避开船、飞机和无人机前方的障碍物。此外,上述lidar装置可以用作用于工厂自动化的自动驾驶机器人、用于安全性的固定传感器、或者用于获得关于安装在道路一侧或穿过道路的物体的3d信息的目的。
138.尽管已参考附图中示出的示例实施例描述了具有宽视角的上述lidar装置,但是它们只是示例。对每个示例性实施例中的特征或方面的描述应当典型地被看作是可用于其他实施例中的其他类似特征或方面。应当理解,本文所描述的示例实施例应当被认为仅是描述性的,而不是为了限制目的。在权利要求中而不是在以上描述中指出权利范围,并且在等同物的范围内的所有差异应被解释为包括在该权利范围内。
139.前述实施例仅是示例的而不应被解释为限制性的。本教导能够被容易地应用于其他类型的装置。此外,对示例性实施例的描述意在是说明性的,而不是为了限制权利要求的范围,并且本领域技术人员将清楚多种替代、修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。