1.本发明涉及自动修剪技术领域,具体涉及高速路中央分隔带绿植修剪,尤其涉及一种中央分隔带绿植自动修剪装置。
背景技术:
2.中央分隔带指的是沿道路纵向设置的分隔车行道用的带状设施,为保证高速公路和一级公路的行车安全和应有的功能,应设置分隔带,随着汽车保有量的激增以及车辆性能的稳步提升,交通参与者对作为城市道路主要交通设施的中央分隔带也寄予了更高的期望,中央分隔带不仅要具有隔离双向交通、减少对向交通干扰的一般功能,还应具有埋设通信管道、安装防眩设施、保护行人过街、为设置路灯及标志标牌提供空间、为市政施工提供作业场所等功能,作为城市道路的一部分,中央分隔带的设计更要基于安全和通畅的角度考虑与路段交通组织及交通管理控制方案相配合。
3.现有的中央分隔带内端会进行绿植的栽种,一方面增加道路观赏性,另一方面对汽车尾气进行净化,提高环境舒适度,而绿植长时间栽种会增长迅速,增高的绿植会对驾驶者视线进行阻挡,影响驾驶员正常驾驶,很容易引发交通事故,所以需要定期对绿植进行修剪。传统的修剪方式是通过人工进行修剪,该修剪方式效率低,修剪人员不安全,特别是在高速路上的中央分隔带绿植的修剪,因此,需要设计一种全自动化的修剪种植。
技术实现要素:
4.本发明的目的在于提供一种中央分隔带绿植自动修剪装置,解决现有修剪方式效率低下和修剪工作人员不安全的技术问题。
5.为了实现上述目的,本发明采用的技术方案如下:
6.一种中央分隔带绿植自动修剪装置,包括行走装置、图像识别摄像头、前端修剪装置、前端修剪模型具刀、伸缩横杆、清扫结构和方形修剪装置,两个伸缩横杆横跨设置在两个行走装置的顶端,在执行修剪中央分隔带绿植遇到柱杆时,伸缩横杆收缩通过,图像识别摄像头设置在前端的一个伸缩横杆上,图像识别摄像头用于检测中央分隔带是否有柱杆和定位柱杆的位置,同时实时检测植物的植株的位置,前端修剪装置可移动的设置在伸缩横杆的底部,前端修剪模型具刀可拆卸设置在前端修剪装置的底部,前端修剪装置通过前端修剪模型具刀用于修剪单棵植物模型形状,清扫结构设置在行走机构的后端,清扫结构用于清扫掉落在两侧的剪落物,方形修剪装置设置在后端的一个伸缩横杆上,方形修剪装置用于修剪连续方形的中央分隔带绿植。
7.进一步地,行走装置包括两个行走结构,行走结构上设置有缓冲结构,两个缓冲结构的顶端设置有连接横杆箱连接,连接横杆箱上设置有两根支撑杆,根支撑杆的外侧设置有行车提示反光板,支撑杆上设置有伸缩结构,伸缩横杆设置在伸缩结构上竖直上下移动。
8.进一步地,行走结构的内侧设置有侧向轮,侧向轮水平横向设置,侧向轮的轮面上设置有压力传感器,侧向轮紧贴在中央分隔带绿植种植的外侧隔墙上,压力传感器用于检
测与外侧隔墙的压力,使得行走结构紧贴着外侧隔墙行驶。
9.进一步地,伸缩横杆包括两侧的固定横杆和中间伸缩板,两端的固定横杆固定横向设置在伸缩结构上,中间伸缩板设置在一侧的固定横杆上,并可横向伸缩设置,中间伸缩板的前端与另一侧的固定横杆设置为伸缩接合口,伸缩接合口上设置有自动定阵列,自动定阵列用于修正两边的行走装置分开行走后的偏差,当完全对其时,伸缩横杆从原来的收缩分开行传状态,变为伸缩横杆伸长两侧的行走装置连接为整体行走。
10.进一步地,自动定阵列为光电传感器阵列,一端设置有若干排列的光电发射探头,另一端设置有所干个与光电发射探头相同排列的光电接收头,每个光电发射探头设置编号,同时每个光电发射探头的发射光强度不同,光电接收头对应设置初始应接收的光电型号强度,当每个光电接收头的光电信号强度在预设值的范围时,表示已经两侧对其,则伸缩横杆可以从收缩状态伸长对接,当光电接收头的光电信号强度不在预设值的范围时,则取出一个光电接收头已经接收有光电信号的值,然后识别,判断该光电信号的值与哪个光电接收头初始设置值相同,则根据编号的位置进行调整两侧的行走装置实现对齐,其中伸缩接合口的一侧设置有接合感应开关,接合感应开关为磁力吸合开关,当接合感应开关吸合并导通时,表示完全对齐合并。
11.进一步地,方形修剪装置包括顶部伸缩机构、顶部平板、右侧连接杆、右侧伸缩结构、右侧平板、左侧连接杆、左侧伸缩结构和左侧平板,顶部伸缩机构可移动设置在伸缩横杆上,顶部平板横向设置在顶部伸缩机构的底部,顶部平板的前端和底部设置有电动修剪小刀,用于修剪连续方形的中央分隔带绿植的顶端,右侧连接杆和左侧连接杆可移动设置在伸缩横杆上,并设置在顶部平板的两侧,右侧伸缩结构横向设置在右侧连接杆的底部,右侧平板竖向设置在右侧伸缩结构上,左侧伸缩结构横向设置在左侧连接杆上,左侧平板竖向设置在左侧伸缩结构上,左侧平板和右侧平板相对设置,左侧平板和右侧平板的前端和内侧均设置有电动修剪小刀。
12.进一步地,前端修剪模型具刀设置为倒置的“l”型模型具刀或者半圆形模型具刀,模型具刀的前端设置有电动修剪小刀。
13.进一步地,行走装置还设置有剪落物收集箱,剪落物收集箱与清扫结构通过吸合管道连接。
14.本发明由于采用了上述技术方案,具有以下有益效果:
15.本发明可以实现高速路上的中央分隔带绿植自动修剪,不用封闭高速路的交通,同时更加的省时省力,安全,能够自动的感应出柱杆,自动的避让,同时能够对单棵植物的模型的修剪,具有更加的智能化,清扫结构自动清扫掉落的剪落物,并同时对高速路的侧边进行清扫,实现一举两得。
附图说明
16.图1是本发明结构示意图;
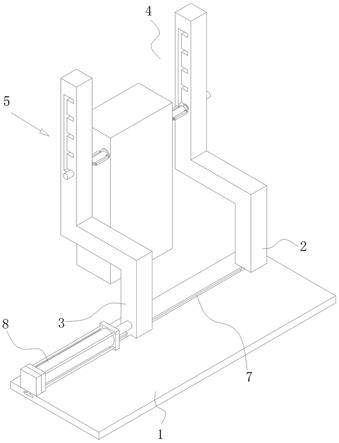
17.图2是本发明方形修剪装置结构图;
18.图3是本发明前端修剪模型具刀第一种结构图;
19.图4是本发明前端修剪模型具刀第二种结构图;
20.图5是本发明伸缩接合口的自动定阵列结构示意图;
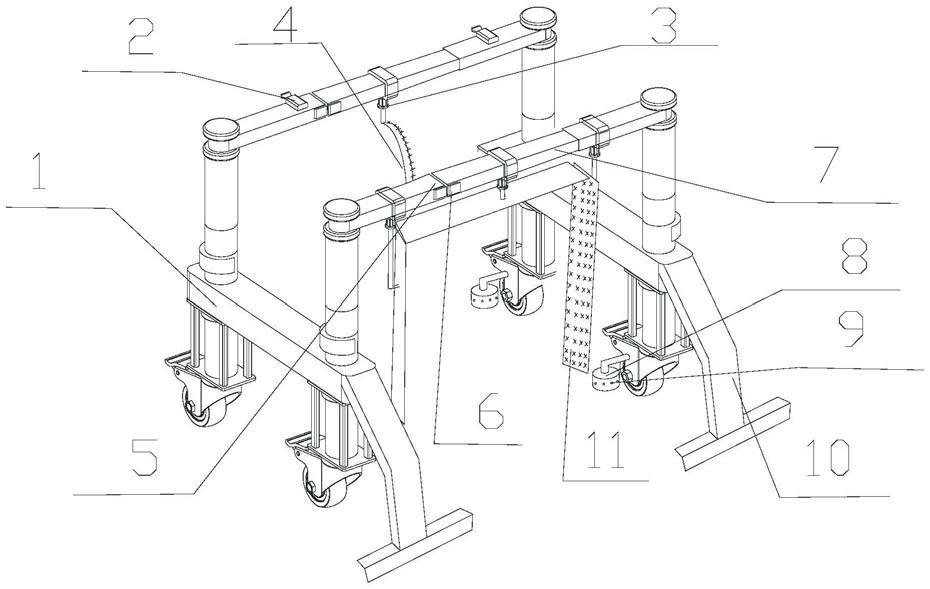
21.图6是本发明行走机构结构示意图。
22.附图中,1-行走装置,1.1-行走结构,1.2-缓冲结构,1.3-连接横杆箱,1.4-支撑杆,1.5-行车提示反光板,1.6-伸缩结构,2-图像识别摄像头,3-前端修剪装置,4-前端修剪模型具刀,5-伸缩接合口,5.1-自动定阵列,6-接合感应开关,7-伸缩横杆,8-侧向轮,9-压力传感器,10-清扫结构,11-方形修剪装置,11.1-顶部伸缩机构,11.2-顶部平板,11.3-右侧连接杆,11.4-右侧伸缩结构,11.5-右侧平板,11.6-左侧连接杆,11.7-左侧伸缩结构,11.8-左侧平板。
具体实施方式
23.为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举出优选实施例,对本发明进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本发明的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本发明的这些方面。
24.如图1所示,一种中央分隔带绿植自动修剪装置,包括行走装置1、图像识别摄像头2、前端修剪装置3、前端修剪模型具刀4、伸缩横杆7、清扫结构10和方形修剪装置11,两个伸缩横杆7横跨设置在两个行走装置1的顶端,在执行修剪中央分隔带绿植遇到柱杆时,伸缩横杆7收缩通过,图像识别摄像头2设置在前端的一个伸缩横杆7上,图像识别摄像头2用于检测中央分隔带是否有柱杆和定位柱杆的位置,同时实时检测植物的植株的位置,前端修剪装置3可移动的设置在伸缩横杆7的底部,前端修剪模型具刀(4)可拆卸设置在前端修剪装置3的底部,前端修剪装置3通过前端修剪模型具刀4用于修剪单棵植物模型形状,清扫结构10设置在行走机构1的后端,清扫结构10用于清扫掉落在两侧的剪落物,方形修剪装置11设置在后端的一个伸缩横杆7上,方形修剪装置11用于修剪连续方形的中央分隔带绿植。提高裁剪效率同时整个装置移动过程中靠近中央分隔带,不会影响高速公路车辆正常行驶。
25.本发明实施例中,如图6所示,行走装置1包括两个行走结构1.1,行走结构1.1上设置有缓冲结构1.2,两个缓冲结构1.2的顶端设置有连接横杆箱1.3连接,连接横杆箱1.3上设置有两根支撑杆1.4,根支撑杆1.4的外侧设置有行车提示反光板1.5,支撑杆1.4上设置有伸缩结构1.6,伸缩横杆7设置在伸缩结构1.6上竖直上下移动。
26.本发明实施例中,如图1和6所示,行走结构1.1的内侧设置有侧向轮8,侧向轮8水平横向设置,侧向轮8的轮面上设置有压力传感器9,侧向轮8紧贴在中央分隔带绿植种植的外侧隔墙上,压力传感器9用于检测与外侧隔墙的压力,使得行走结构1.1紧贴着外侧隔墙行驶。
27.本发明实施例中,如图5和6所示,伸缩横杆7包括两侧的固定横杆和中间伸缩板,两端的固定横杆固定横向设置在伸缩结构1.6上,中间伸缩板设置在一侧的固定横杆上,并可横向伸缩设置,中间伸缩板的前端与另一侧的固定横杆设置为伸缩接合口5,伸缩接合口5上设置有自动定阵列5.1,自动定阵列5.1用于修正两边的行走装置1分开行走后的偏差,当完全对其时,伸缩横杆7从原来的收缩分开行传状态,变为伸缩横杆7伸长两侧的行走装置1连接为整体行走。
28.自动定阵列5.1为光电传感器阵列,一端设置有若干排列的光电发射探头,另一端设置有所干个与光电发射探头相同排列的光电接收头,每个光电发射探头设置编号,同时
每个光电发射探头的发射光强度不同,光电接收头对应设置初始应接收的光电型号强度,当每个光电接收头的光电信号强度在预设值的范围时,表示已经两侧对其,则伸缩横杆7可以从收缩状态伸长对接,当光电接收头的光电信号强度不在预设值的范围时,则取出一个光电接收头已经接收有光电信号的值,然后识别,判断该光电信号的值与哪个光电接收头初始设置值相同,则根据编号的位置进行调整两侧的行走装置1实现对齐,其中伸缩接合口5的一侧设置有接合感应开关6,接合感应开关6为磁力吸合开关,当接合感应开关6吸合并导通时,表示完全对齐合并。
29.如图5所示,当最左上端的接收头接收到的右下端的发射头的发射信号时,则此时需要接收头一侧的行走结构移动,另一侧停止,然后在通过行走结构的竖直伸缩杆的电机记性调节高度,实现在横向和竖向的调解,实现完全的对齐人,然后打开磁力洗的开关,产生磁力进行吸合固定。
30.本发明实施例中,如图2所示,方形修剪装置11包括顶部伸缩机构11.1、顶部平板11.2、右侧连接杆11.3、右侧伸缩结构11.4、右侧平板11.5、左侧连接杆11.6、左侧伸缩结构11.7和左侧平板11.8,顶部伸缩机构11.1可移动设置在伸缩横杆7上,顶部平板11.2横向设置在顶部伸缩机构11.1的底部,顶部平板11.2的前端和底部设置有电动修剪小刀,用于修剪连续方形的中央分隔带绿植的顶端,右侧连接杆11.3和左侧连接杆11.6可移动设置在伸缩横杆7上,并设置在顶部平板11.2的两侧,右侧伸缩结构11.4横向设置在右侧连接杆11.3的底部,右侧平板11.5竖向设置在右侧伸缩结构11.4上,左侧伸缩结构11.7横向设置在左侧连接杆11.6上,左侧平板11.8竖向设置在左侧伸缩结构11.7上,左侧平板11.8和右侧平板11.5相对设置,左侧平板11.8和右侧平板11.5的前端和内侧均设置有电动修剪小刀。
31.本发明实施例中,如图3-4所示,前端修剪模型具刀4设置为倒置的“l”型模型具刀或者半圆形模型具刀,模型具刀的前端设置有电动修剪小刀。行走装置1还设置有剪落物收集箱,剪落物收集箱与清扫结构10通过吸合管道连接。剪落物收集箱在一定距离内进行倾倒到收集车内。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。