1.本公开涉及医疗器械领域,具体涉及一种血管内超声设备。
背景技术:
2.血管内超声(intravascular ultrasound,ivus)设备通常是指利用超声技术和介入式导管技术在血管内进行成像的设备。具体而言,该设备主要是通过介入式导管将微型的超声换能器置于血管内的特定位置,并通过该介入式导管使超声换能器在血管内进行回撤和旋转。在超声换能器回撤和旋转的过程中,超声换能器生成超声信号并且该超声信号在血管内传播并形成回波,基于该回波以获取例如血管壁、血管腔等血管内的图像信息。
3.目前,通常是通过将介入式导管联接至电机以使超声换能器在血管内进行回撤。在现有的血管内超声设备中,通常是通过齿轮啮合、带传动等传统的传动方式来使电机致动介入式导管,并且通过调节电机与介入式导管之间的联动关系,从而实现自动回撤与手动回撤之间的切换。
4.然而,在上述现有技术中,齿轮啮合、带传动等传统的传动方式是接触式传动方式,当调节电机与介入式导管之间的联动关系时,需要在物理上分离传动部件,例如分离彼此啮合的两个齿轮,由此可能造成使用上的不便。
技术实现要素:
5.本公开是有鉴于上述现有技术的状况而提出的,其目的在于提供一种通过非接触式的传动方式进行自动回撤的回撤装置以及包括该回撤装置的血管内超声设备。
6.为此,本公开第一方面提供一种回撤装置,其包括底座、与所述底座可相对移动的安装座、以及安装在所述安装座上的驱动机构、传动机构、离合机构,所述传动机构具有呈柱状且并列布置的第一磁性轮和第二磁性轮,所述第一磁性轮和所述第二磁性轮配置为可进行磁力传递,所述第一磁性轮由所述驱动机构驱动,所述第二磁性轮与所述底座联接,所述离合机构具有由非导磁材料制备而成的隔离部,所述隔离部可移动地布置在所述第一磁性轮与所述第二磁性轮之间,以使所述第一磁性轮和所述第二磁性轮之间的磁力传递连接或断开,从而接合或断离所述驱动机构与所述底座之间的动力传递关系。
7.在本公开第一方面所涉及的回撤装置中,通过将具有沿着周向分布的一个或多个磁极对的第一磁性轮和第二磁性轮并列布置,并且使驱动机构驱动第一磁性轮、使底座与第二磁性轮联接。在这种情况下,驱动机构能够通过一种非接触式的传动方式对底座进行传动,从而使得安装座与底座相对移动。另外,通过在第一磁性轮与第二磁性轮之间可移动地设置由非导磁材料制备而成的隔离部,由此能够方便调节驱动机构与底座之间的传动关系,从而在自动模式与手动模式之间进行切换。
8.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述传动机构还包括传动轴和传动齿轮,所述传动轴的一端连接于所述第二磁性轮、另一端连接于所述传动齿轮,所述底座具有与所述传动齿轮啮合的传动齿条,所述底座相对于地面固定布置,所述安装座
可通过所述驱动机构和所述传动机构而沿着所述传动齿条移动。由此能够便于将驱动机构所输出的圆周运动转化为直线运动。
9.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述第一磁性轮具有呈柱状的第一基座、以及呈筒状且套设于所述第一基座的第一磁环,所述驱动机构的输出轴连接于所述第一基座,所述第一磁环具有沿着周向分布的一个或多个磁极对,所述第二磁性轮具有呈柱状的第二基座、以及呈筒状且套设于所述第二基座的第二磁环,所述底座与所述第二基座联接,所述第二磁环具有沿着周向分布的一个或多个磁极对。
10.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述离合机构具有可移动地设置在所述第二磁性轮的外周的可动部、以及与所述可动部连接的回复部,所述隔离部设置于所述可动部并随着所述可动部移动,所述回复部为所述可动部提供作用力以使所述隔离部趋于离开所述第一磁性轮与所述第二磁性轮之间。在这种情况下,通过回复部能够使隔离部自动离开第一磁性轮与第二磁性轮之间,由此能够方便地在手动模式与自动模式之间进行切换。
11.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述可动部具有以与所述第二磁性轮共轴的方式可转动地设置于所述安装座的环,所述环的外径大于所述第二磁性轮的直径,所述回复部为固定于所述安装座的扭簧,所述扭簧的至少一个末端与所述环连接。
12.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述隔离部为中空的筒状壳体,所述筒状壳体设置于所述环并将所述第二磁性轮容纳在内,并且在所述筒状壳体的侧壁上设有沿着轴向的开口。在这种情况下,当该开口位于第一磁性轮与第二磁性轮之间时,第二磁性轮能够随着第一磁性轮进行转动。
13.另外,在本公开第一方面所涉及的回撤装置中,可选地,还包括致动所述可动部进行移动的致动机构,所述致动机构具有呈长条状的拨杆、以及固定设置在所述安装座上的固定柱,所述拨杆的长度方向正交于所述环的轴向,所述固定柱的轴向平行于所述环的轴向,并且所述拨杆的一端通过销活动连接于所述环、另一端可转动地连接于所述固定柱。在这种情况下,通过拨动拨杆能够对环进行转动,从而能够便于调整隔离部所处的位置。
14.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述离合机构具有布置在所述环的一侧的限位部,所述销穿过所述拨杆和所述环并被所述限位部进行限位。在这种情况下,通过限位部对销进行阻挡,由此能够便于限定环转动的角度。
15.另外,在本公开第一方面所涉及的回撤装置中,可选地,所述限位部为形成在所述安装座上的镂空或凸起,在沿着正交于所述销的轴向方向上进行投影,所述销与该镂空的侧壁、或该凸起部分重合。
16.本公开第二方面提供一种血管内超声设备,其包括具有内腔的导管、超声换能器、旋转轴、以及本公开第一方面所涉及的回撤装置,所述超声换能器置于所述导管的内腔中,所述旋转轴的一端联接于所述超声换能器、另一端联接于所述回撤装置的底座或安装座。在这种情况下,通过旋转轴将超声换能器与回撤装置的底座或安装座联接,当回撤装置的底座与安装座相对移动时,超声换能器能够在导管的内腔中沿着导管进行移动。
17.根据本公开,能够通过非接触式的传动方式对血管内超声设备的超声换能器进行自动回撤。
附图说明
18.现在将仅通过参考附图的例子进一步详细地解释本公开,其中:
19.图1是示出本公开示例所涉及的回撤装置的外观示意图。
20.图2是示出本公开示例所涉及的回撤装置的结构示意图。
21.图3是示出本公开示例所涉及的回撤装置的分解示意图。
22.图4是示出沿着图1所示aa'的剖面示意图。
23.图5a是示出本公开示例所涉及的传动机构的示意图;图5b是示出第一磁性轮和第二磁性轮的俯视示意图。
24.图6是示出本公开示例所涉及的离合机构的示意图。
25.图7是示出本公开示例所涉及的致动机构的示意图。
26.图8a和图8b是示出沿着图1所示bb'的剖面示意图,其中,图8a是示出本公开示例所涉及的传动机构传动时的示意图,图8b是示出本公开示例所涉及的传动机构非传动时的示意图。
27.图9是示出本公开示例所涉及的安装座的限位部的示意图。
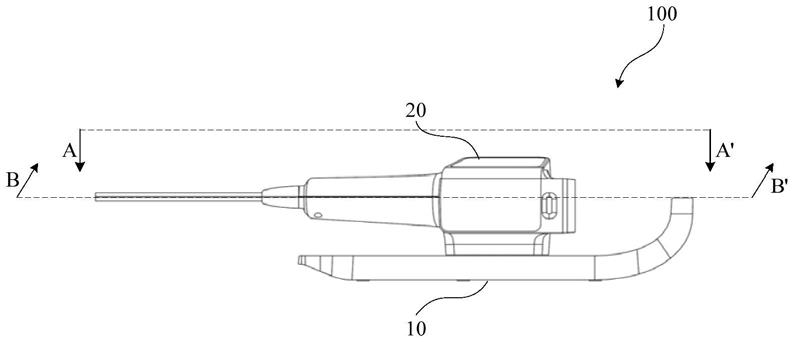
28.图10是示出本公开示例所涉及的血管内超声设备的应用示意图。
29.图11是示出本公开示例所涉及的血管内超声设备的简化示意图。
具体实施方式
30.以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
31.需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
32.需要说明的是,在本文中,“上方”、“朝向上方”、“下方”、“朝向下方”、“上下方向”、“左侧”、“朝向左侧”、“左方”、“朝向左方”、“右侧”、“朝向右侧”、“右方”、“朝向右方”、“左右方向”、“前方”、“朝向前方”、“后方”、“朝向后方”、“前后方向”等相对位置和相对方向术语,是参照通常操作姿态,并且不应当认为是限制性的。
33.本实施方式涉及一种回撤装置,是用于牵引位于介入式导管内的器械进行回撤的回撤装置。本实施方式还涉及一种血管内超声设备,是利用超声技术和介入式导管技术在血管内进行成像的设备,该设备可以使用本实施方式所涉及的回撤装置来对位于介入式导管内的超声换能器进行牵引。
34.以下,结合附图,对本实施方式所涉及的回撤装置以及包括该回撤装置的血管内超声设备进行详细说明。
35.图1是示出本公开示例所涉及的回撤装置100的外观示意图。图2是示出本公开示例所涉及的回撤装置100的结构示意图。图3是示出本公开示例所涉及的回撤装置100的分解示意图。图4是示出沿着图1所示aa'的剖面示意图。需要说明的是,为了更清楚地示意回撤装置100的结构,图2、图3和图4省去了部分非必要部件,但这不应当理解为对本实施方式
的任何限定。
36.在本实施方式中,回撤装置100可以包括底座10和安装座20(参见图1)。在一些示例中,底座10与安装座20可以相对移动。在本实施方式中,回撤装置100还包括安装在安装座20上的驱动机构30、传动机构40。驱动机构30可以经由传动机构40而对底座10进行传动,以使底座10与安装座20相对移动。
37.在一些示例中,回撤装置100还包括安装在安装座20上的离合机构50(参见图2-3)。离合机构50可以作用于传动机构40以接合或断离驱动机构30与底座10之间的动力传递关系。
38.在一些示例中,回撤装置100还包括安装在安装座20上的致动机构60(参见图2-3)。致动机构60可以作用于离合机构50以调节传动机构40的接合或断开的状态。
39.在一些示例中,底座10可以包括底座主体12、以及形成在所述底座主体12上的传动齿条14(参见图2-3)。在一些示例中,传动机构40可以与传动齿条14联接。在这种情况下,通过驱动机构30和传动机构40,能够使安装座20沿着传动齿条14移动。在一些示例中,传动齿条14可以呈直线状。由此,能够将驱动机构30的圆周运动转化为直线运动。
40.在一些示例中,底座10可以相对于地面固定布置。在这种情况下,被牵引物可以与安装座20连接,当安装座20沿着底座10的传动齿条14移动时,被牵引物随着安装座20移动。在另一些示例中,安装座20可以相对于地面固定布置。在这种情况下,被牵引物可以与底座10连接,当底座10经由驱动机构30、以及连接于传动齿条14的传动机构40而被移动时,被牵引物随着底座10移动。
41.在一些示例中,安装座20可以包括安装架22。驱动机构30、传动机构40、离合机构50可以设置在安装架22上(参见图2)。在一些示例中,安装架22可以呈工字状,工字状的安装架22可以包括呈长板状的中央部220、由中央部220的上端朝向右侧延伸的右上翼222、由中央部220的下端朝向右侧延伸的右下翼224、由中央部220的上端朝向左侧延伸的左上翼226、以及由中央部220的上端朝向左侧延伸的左下翼228(参见图3)。在一些示例中,中央部220的长度方向可以正交于右上翼222的长度方向、右下翼224的长度方向、左上翼226的长度方向、以及左下翼228的长度方向。
42.在一些示例中,安装座20还可以包括壳体24(参见图2-3)。壳体24可以形成为中空结构并将安装架22、驱动机构30、传动机构40、离合机构50、以及致动机构60容纳在内。在一些示例中,安装座20还可以包括支承部26,支承部26可以固定设置在壳体24的内部,安装架22可以由支承部26支承(参见图2)。
43.在一些示例中,驱动机构30可以包括电机32、以及设置在电机32上的输出轴34(参见图3)。在本实施方式中,电机32可以是旋转电机。在一些示例中,电机32可以设置在安装架22的右下翼224上,并且输出轴34可以朝向右上翼222延伸(参见图2-3)。另外,在一些示例中,输出轴34的轴向可以与中央部220的长度方向平行。
44.图5a是示出本公开示例所涉及的传动机构40的示意图;图5b是示出第一磁性轮42和第二磁性轮44的俯视示意图。
45.在一些示例中,传动机构40可以具有第一磁性轮42和第二磁性轮44(参见图5a)。在一些示例中,第一磁性轮42和第二磁性轮44可以呈柱状,并且可以并列布置。也就是说,第一磁性轮42的中心轴线可以平行于第二磁性轮44的中心轴线。在一些示例中,第一磁性
轮42可以设置在安装架22的右上翼222上,第二磁性轮44可以设置在安装架22的左上翼226上。
46.在一些示例中,第一磁性轮42与第二磁性轮44之间可以具有预定间距。在一些示例中,预定间距可以为0.1mm至1.0mm,例如0.1mm、0.2mm、0.3mm、0.4mm、0.5mm、0.6mm、0.7mm、0.8mm、0.9mm、或1.0mm。
47.在一些示例中,第二磁性轮44可以随着第一磁性轮42进行转动。所述第一磁性轮和所述第二磁性轮配置为可进行磁力传递。在一些示例中,第一磁性轮42可以由驱动机构30驱动,并且第二磁性轮44可以联接于底座10。
48.在一些示例中,第一磁性轮42和第二磁性轮44可以分别具有沿着周向分布的一个或多个磁极对(参见图5b)。在图5b所示的实施例中,示意性标记出第一磁性轮42的一个磁极对42a和42b、以及第二磁性轮44的一个磁极对44a和44b。当第一磁性轮42进行转动时,通过磁极对42a和42b与磁极对44a和44b之间的磁性作用,第二磁性轮44可以随着第一磁性轮42进行转动。
49.在一些示例中,第一磁性轮42可以具有呈柱状的第一基座422、以及呈筒状且套设于第一基座422的第一磁环424(参见图5b)。在一些示例中,驱动机构30的输出轴34可以连接于第一基座422以驱动第一磁性轮42(参见图2-4)。在一些示例中,第一磁环424可以具有沿着周向分布的一个或多个磁极对。
50.在一些示例中,第二磁性轮44可以具有呈柱状的第二基座442、以及呈筒状且套设于第二基座442的第二磁环444(参见图5b)。在一些示例中,底座10可以联接于第二基座442。在一些示例中,第二磁环444可以具有沿着周向分布的一个或多个磁极对。另外,在一些示例中,第一磁环424与第二磁环444之间可以具有预定间距。
51.在本实施方式中,优选地,第一磁环424与第二磁环444间距为0.5mm,该距离能够较好便于扭矩的传递。
52.另外,在一些示例中,传动机构40还可以包括传动轴46和传动齿轮48(参见图3)。传动轴46的一端可以连接于第二磁性轮42(例如,第二基座442)、另一端可以连接于传动齿轮48。在一些示例中,传动轴46可以第二磁性轮42朝向左下翼228延伸,穿过左下翼228后与传动齿轮48连接。在一些示例中,传动齿轮48可以与底座10的传动齿条14啮合。在这种情况下,驱动机构30经由传动机构40而将动力传递至底座10的传动齿条14,由此能够使得底座10与安装座20相对移动。在一些示例中,传动轴46、传动齿轮48可以与第二磁性轮44共轴。
53.在一些示例中,底座10可以相对于地面固定布置。在这种情况下,被牵引物可以与安装座20连接,当安装座20沿着底座10的传动齿条14移动时,被牵引物随着安装座20移动。在另一些示例中,安装座20可以相对于地面固定布置。在这种情况下,被牵引物可以与底座10连接,当底座10经由驱动机构30、以及连接于传动齿条14的传动机构40而被移动时,被牵引物随着底座10移动。
54.另外,在一些示例中,传动机构40还可以包括设置在传动轴46上的检测器(未图示)。在这种情况下,通过在传动轴46上设置检测器来检测例如传动轴46的转动速度、转动角度等数据,由此能够便于获知对被牵引物的牵引参数,例如被牵引物被牵引的速率、距离等。
55.另外,在一些示例中,本实施方式所涉及的回撤装置100也可以不包括底座10。第
二磁性轮44也可以经由传动轴46和传动齿轮48而直接将动力传递至外部,例如通过与外部设备的齿轮、齿条、联轴器等接合而将动力传递至外部。
56.图6是示出本公开示例所涉及的离合机构50的示意图。
57.在本实施方式中,如上所述,离合机构50可以作用于传动机构40以接合或断离驱动机构30与底座10之间的动力传递关系。在一些示例中,离合机构50可以具有由非导磁材料制备而成的隔离部52。在一些示例中,隔离部52可以可移动地布置在第一磁性轮42与第二磁性轮44之间,以使第一磁性轮42和第二磁性轮44之间的磁力传递连接或断开,从而接合或断离驱动机构30与底座10之间的动力传递关系。当隔离部52位于第一磁性轮42与第二磁性轮44之间时,第一磁性轮42与第二磁性轮44之间的动力传递被断离,从而使得驱动机构30与底座10之间的动力传递关系被断离。
58.另外,在一些示例中,隔离部52可以为中空的筒状壳体(参见图6)。筒状壳体可以将第二磁性轮44容纳在内。另外,在一些示例中,在筒状壳体的侧壁上可以设有沿着轴向的开口522(参见图6)。在这种情况下,当筒状壳体转动以使开口522位于第一磁性轮42与第二磁性轮44之间时,第一磁性轮42可以对第二磁性轮44施加磁力作用,当筒状壳体转动以使开口522离开第一磁性轮42与第二磁性轮44之间时,第一磁性轮42不再对第二磁性轮44施加磁力作用。
59.在一些示例中,开口522的宽度不大于第一磁性轮42或第二磁性轮44的外径。在一些示例中,开口522的宽度可以为第一磁性轮42的外径或第二磁性轮44的外径的1/6至1/2,例如1/6、1/5、1/4、1/3、或1/2等。另外,在一些示例中,开口522的长度可以不小于第一磁环424或第二磁环444的长度。另外,在一些示例中,开口522的长度可以不大于第一磁性轮42的长度或第二磁性轮44的长度。由此,能够便于扭矩传递。
60.但本公开的示例并不限于此,在另一些示例中,隔离部52也可以为板状壳体,板状壳体移动至第一磁性轮42与第二磁性轮44之间时,第一磁性轮42不再对第二磁性轮44施加磁力作用,当板状壳体离开第一磁性轮42与第二磁性轮44之间时,第一磁性轮42可以对第二磁性轮44施加磁力作用。
61.在一些示例中,离合机构50可以具有可移动地设置在第二磁性轮44的外周的可动部54(参见图6)。在一些示例中,可动部54可以具有以与第二磁性轮44共轴的方式可转动地设置于安装座20的环542(参见图6)。在一些示例中,环542可以可转动地设置于安装架22的左上翼226上。环542的外径可以大于第二磁性轮44的直径。在一些示例中,环542可以位于第二磁性轮44的上方或下方。在另一些示例中,环542也可以套设于第二磁性轮44的外周。在一些示例中,隔离部52可以设置于可动部54并可以随着可动部54进行移动。在一些示例中,隔离部52可以设置在环542上。在一些示例中,隔离部52的直径可以大致等于环542的外径。
62.在一些示例中,在环542的外周上可以形成有凸缘544(参见图6)。通过拨动凸缘544,能够使环542绕着第二磁性轮44的中心轴线进行自转,从而能够使隔离部52绕着第二磁性轮44的中心轴线进行自转,以使开口522进入或离开第一磁性轮42与第二磁性轮44之间。在一些示例中,环542的转动角度可以为40度至90度,例如40度、45度、50度、55度、60度、65度、70度、75度、80度、85度、或90度等。也就是说,隔离部52的转动角度可以为40度至90度,例如40度、45度、50度、55度、60度、65度、70度、75度、80度、85度、或90度等。
63.在一些示例中,离合机构50还可以包括与可动部54连接的回复部56(参见图6)。回复部56可以为可动部54提供作用力以使设置在环542上的隔离部52趋于离开第一磁性轮42与第二磁性轮44之间。
64.在一些示例中,回复部56可以为固定于安装座20(例如,安装架22的左上翼226)的扭簧。在一些示例中,扭簧的至少一个末端可以与可动部54卡合。当可动部54转动时,扭簧发生弹性形变,以为可动部54提供回复至初始状态的作用力。
65.图7是示出本公开示例所涉及的致动机构的示意图。图8a和图8b是示出沿着图1所示bb'的剖面示意图,其中,图8a是示出本公开示例所涉及的传动机构传动时的示意图,图8b是示出本公开示例所涉及的传动机构非传动时的示意图。
66.另外,在一些示例中,回撤装置100还可以包括致动可动部54进行移动的致动机构60(参见图7、图8a、图8b)。在一些示例中,致动机构60可以具有呈长条状的拨杆62、以及固定设置在安装座20上的固定柱64。拨杆62可以绕着固定柱64进行转动。在一些示例中,固定柱64可以设置在壳体24上。在一些示例中,固定柱64的轴向可以平行于环542的轴向。另外,在一些示例中,拨杆62的长度方向可以正交于环542的轴向。
67.在一些示例中,拨杆62的一端可以连接于固定柱64、另一端可以通过销66而活动连接于环542。在一些示例上,在拨杆62靠近环542的端可以设有通孔622,并且在可动部54的凸缘544上可以设有通孔546,销66可以插入拨杆62的通孔622、以及可动部54的通孔546,以使拨杆62与环542连接。当推动拨杆62绕着固定柱64进行转动时,通过销66能够使环542进行转动,从而使隔离部52进行转动。
68.另外,在一些示例中,致动机构60还可以包括触动部68。触动部68可以抵接于拨杆62。在一些示例中,触动部68相较于固定柱62可以更靠近环542。在这种情况下,通过对触动部68施加作用力,拨杆62可以绕着固定柱64进行转动,并联动环542进行转动,以调节隔离部52与第一磁性轮42和第二磁性轮44之间的位置关系,从而接合或断离驱动机构30与底座(或者外部设备)之间的动力传递关系。
69.如图8a和图8b所示,通过对触动部68施加作用力,拨杆62可以绕着固定柱64进行转动,从而联动环542进行转动,以改变隔离部52与第一磁性轮42和第二磁性轮44之间的位置关系,从而调节驱动机构30与底座10之间的联动关系。
70.具体而言,在一些示例中,当对触动部68施加作用力时,隔离部52进入第一磁性轮42与第二磁性轮44之间,第一磁性轮42不再对第二磁性轮44施加磁力作用,从而断开驱动机构30与底座10之间的联动关系,将底座10的移动切换为手动驱动。当不再对触动部68施加作用力时,环542在回复部56的作用下回复至初始位置以使隔离部52离开第一磁性轮42与第二磁性轮44之间,第一磁性轮42对第二磁性轮44施加磁力作用,驱动机构30与底座10联动,底座10的移动切换为自动驱动。
71.本实施方式采用磁性轮传动,并通过一个隔离部52实现手自切换,结构简单,生产制造成本低,手自切换顺畅,只需用较少的力就能转动隔离部52实现手自切换功能,操作体验感得到极大的提升。
72.同时,采用磁性轮传动方式,除了保留传统齿轮传动的结构紧凑的优点外,还具有传动无磨损、无噪声和无背隙以及传动平稳的优点。图9示出本公开示例所涉及的离合机构50的限位部58的示意图。在一些示例中,离合机构50可以具有布置在环542的一侧的限位部
58(参见图9)。销66穿过拨杆62和环542并被限位部58进行限位。在这种情况下,通过限位部58对销66进行阻挡,由此能够便于限定环542转动的角度,从而能够限定隔离部52的转动角度。
73.另外,在一些示例中,限位部58可以为形成在安装座20上的镂空或凸起,例如形成在左上翼226上的缺口或凸起(参见图9)。在沿着正交于销66的轴向方向上进行投影,销66与该镂空的侧壁、或该凸起部分重合。在这种情况下,当环542进行转动时,销66随之转动至限位部58时会被限位部58阻挡,从而限定环542的转动角度。
74.图10是示出本公开示例所涉及的血管内超声设备1000的应用示意图。图11是示出本公开示例所涉及的血管内超声设备1000的简化示意图。
75.在本实施方式中,如图10和图11所示,血管内超声设备1000可以包括超声换能器1020、导管1040、旋转轴(未图示)、以及回撤装置100。超声换能器1020可以置于导管1040的内腔中,旋转轴的一端可以联接于超声换能器1020、另一端可以联接于回撤装置100的底座10或安装座20。在这种情况下,通过旋转轴将超声换能器1020与回撤装置100的底座10或安装座20联接,当回撤装置100的底座10与安装座220相对移动时,超声换能器1020能够在导管1040的内腔中沿着导管1040进行移动。
76.在一些示例中,超声换能器1020可以在血管内发射超声声束。在本实施方式中,血管内超声设备1000还可以包括主机1060。超声换能器1020在进行移动时可以在血管内发射超声声束并可以接收该超声声束在血管内的反射波,例如超声声束在血管内传播至管壁时所产生的反射波。主机1060可以基于该反射波生成例如血管壁、血管腔等血管内的图像。
77.在一些示例中,超声换能器1020发射的超声声束的中心频率可以为20mhz至60mhz。在一些示例中,优选地,超声换能器1020发射的超声声束的中心频率可以为40mhz至60mhz。
78.在一些示例中,血管内超声设备1000还可以包括旋转机构(未图示)。在一些示例中,旋转机构可以安装在底座10或安装座20上,旋转轴的一端可以联接于超声换能器1020、另一端可以联接于旋转机构。当超声换能器1020沿着图11中l所指示的方向进行平移时,超声换能器1020还可以由旋转机构进行驱动以同时或分时进行旋转,例如沿着图11中r所指示的方向进行旋转。
79.虽然以上结合附图和示例对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。