1.本发明涉及高技术船用装置技术领域,具体涉及一种无人潜航器收放装置及回收方法。
背景技术:
2.无人潜航器是一种在水面水下作业的无人探测装备,国内外主要的无人潜航器外形主要以鱼雷形外形为主,主体截面为规则的回转体结构,并配以较大机翼,如auv、uuv及滑翔机等,还有部分不规则形状的无人潜航器,如arv等。国内相关单位研制的主流滑翔机长度一般在3m左右,主体直径一般在0.3m左右,翼展在1.5m左右,重量大都不超过200kg,研制的主流auv长度一般也不超过5m,艇身宽度在0.55m左右,高度在1.5m左右,翼展也在1.5m左右,总重量一般不超过1.5t。
3.这些无人潜航器在水中作业时,均需要配备相应的收放装置来完成回收和布放,国内外主要的无人潜航器收放形式主要有:滑板拖带式、a型起吊式、水下对接起吊回收式。这些收放装置往往只针对单一外形或类型的无人潜航器,无法满足多种不同外形或类型的无人潜航器的收放要求,通用性较差;且对于个别无人潜航器,尤其是失去动力需要救援捕捞时,需要收放装置有一定的动力,可以主动向无人潜航器靠拢并完成回收作业,然后通过母船进行吊装完成回收,而现在的回收装置大都无法做到。
技术实现要素:
4.本发明旨在提供一种遥控式无人潜航器收放装置,以解决背景技术中存在的问题。
5.为实现上述目的,本发明的技术方案为:一种无人潜航器收放装置,包括整体式的收放笼主体、多个浮力筒、多组可旋转式的电力推进器、用于收拢无人潜航器的承载收放件、用于提供电力保障的电池组和用于遥控的无线通信部件;可旋转式的电力推进器用于提供航行中的动力,通过自身的旋转来改变航向,承载收放件为至少两个,每个承载收放件可拆卸地安装在收放笼主体底部,收放笼主体与承载收放件围合形成至少一端开口的笼式结构,无人潜航器可通过一端开口进入笼式结构内与承载收放件配合完成水面对接回收,承载收放件之间的间距可调整,进而能够适配回收不同外形或类型的无人潜航器。
6.优选地,承载收放件基本呈v形结构,笼式结构的艉部加装有拖网,使得笼式结构为一端开口的半封闭结构。
7.优选地,收放笼主体底部两侧沿长度方向分别设置有若干第一螺栓孔,螺栓穿过第一螺栓孔与承载收放件互相配合从而将承载收放件位置可调节地安装在收放笼主体底部。
8.优选地,浮力筒为两个,分别互相平行设置在收放笼主体的左右两侧,且浮力筒的前后两端呈圆锥形。
9.优选地,收放笼主体的两侧分别设置有卡箍,浮力筒上具有凹槽,卡箍与凹槽嵌套
配合以将浮力筒固定安装在收放笼主体的两侧。
10.优选地,电力推进器为两组,两组电力推进器与两个浮力筒一一对应,每组电力推进器有两个,分别设置在对应浮力筒前后两端的下方。
11.优选地,收放笼主体采用的是5083-h116型号的铝合金板材,收放笼主体内部折弯处还设置有加强筋。
12.优选地,还包括多个基座和吊钩,每两个基座对称设置在每一个承载收放件的底侧,用于实现将收放装置安全平稳的放置于母船甲板上;收放笼主体顶部沿长度方向设置有若干第二螺栓孔,螺栓穿过第二螺栓孔与吊钩互相配合从而将吊钩位置可调节地安装在收放笼主体顶部。
13.优选地,电池组和无线通信部件安装在收放笼主体顶部远离水线的位置,以防止被海水侵蚀导致发生故障。
14.本发明还提供一种无人潜航器回收方法,包括上述任一所述的无人潜航器收放装置,所述的回收方法包括如下步骤:
15.(1)无人潜航器驶回至无人潜航器收放装置附近;
16.(2)遥控开启电力推进器,使得无人潜航器收放装置驶向无人潜航器并与无人潜航器在水面进行对接,使得无人潜航器从一端开口进入到笼式结构内;
17.(3)当无人潜航器位于承载收放件的上方的对应回收位置后,起吊装置将无人潜航器收放装置吊起,使得无人潜航器能够稳固悬停在承载收放件上,无人潜航器被捕获;
18.(4)起吊装置将无人潜航器收放装置和无人潜航器吊起移送至母船上,回收完成。
19.本发明具有以下有益效果:
20.(1)无人潜航器通过一端开口进入笼式结构内与承载收放件配合完成水面对接回收,该回收方式保证了该发明的收放装置具有良好的多用途性、高通用性,且能够通过调整安装承载收放件之间的间距,进而适配收放不同外形的无人潜航器,也可以根据所要收放无人潜航器的特征定制相应形状的承载收放件,对承载收放件进行更换以适配收放不同类型的无人潜航器;本发明通过可旋转式的电力推进器提供动力,然后通过遥控方式控制收放装置主动向无人潜航器靠拢,能够更加方便快捷地完成回收作业。
21.(2)浮力筒为两个,分别互相平行设置在收放笼主体的左右两侧,且浮力筒的前后两端呈圆锥形,保证提供足够储备浮力的同时减少航行过程中的阻力。
附图说明
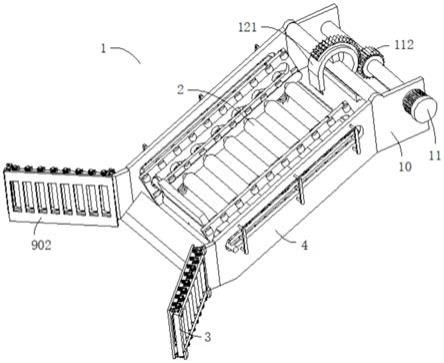
22.图1是本发明一个实施例的主视图;
23.图2是本发明一个实施例的左侧视角图;
24.图3是本发明一个实施例的俯视图;
25.图4是本发明一个实施例的右视图;
26.图5是本发明一个实施例的前视图。
27.附图标注:1收放笼主体,2浮力筒,3电力推进器,4承载收放件,5基座,6吊钩,7电池组,8无线通信部件,9加强筋,10第一螺栓孔,11第二螺栓孔,12卡箍,13无人潜航器。
具体实施方式
28.为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点。图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
29.实施例1:本发明无人潜航器收放装置
30.参阅图1-5所示,作为本发明的实施例,提供一种无人潜航器收放装置,包括整体式的收放笼主体1、多个浮力筒2、多组可旋转式的电力推进器3、用于收拢无人潜航器13的承载收放件4、用于提供电力保障的电池组7和用于遥控的无线通信部件8;可旋转式的电力推进器3用于提供航行中的动力,通过自身的旋转来改变航向,承载收放件4为四个,每个承载收放件4可拆卸地安装在收放笼主体1底部,收放笼主体1与承载收放件4围合形成至少一端开口的笼式结构,无人潜航器13可通过一端开口进入笼式结构内与承载收放件4配合完成水面对接回收,承载收放件4之间的间距可调整,进而能够适配回收不同外形或类型的无人潜航器13。
31.上述技术方案,承载收放件4之间的间距可调整,进而适配回收不同外形的无人潜航器13,承载收放件4是可以拆卸更换的,因此可以根据所要收放无人潜航器13的特征定制相应形状的承载收放件4,对承载收放件4进行更换以适配收放不同类型的无人潜航器13,该回收方式为水面对接起吊回收式,保证了该发明装置具有良好的多用途性、高通用性;本发明为遥控式的收放装置,为了方便使用,本发明配置了工业级的遥控器,设置有灵活的遥控手柄供技术人员操控,为了达到一定的航行精度,操控员需要在实施作业前经过充分的培训,熟练掌握操控要求以使的四个电力推进器3获得良好的配合并达到所需要的航行精度,进而使得收放装置能够主动向无人潜航器13靠拢,能够更加方便快捷地完成回收作业。
32.本发明的无人潜航器收放装置总长在5.5m左右,总宽在3m左右,收放笼主体11结构长度在4.8m左右,内部宽度在2.2m,整个装置的尺寸及结构强度满足承载不大于1.5吨的货物,基本满足国内主流无人潜航器13的收放要求,遥控距离在1km左右,收放装置在方向艉部加装可拆卸的拖网结构,以方便收拢无人潜航器13时,并提供了多种预留接口,即可以根据需要加装视频装置进行超视距作业,也可以更换不同的电源形式,方便扩展船载设备。
33.本实施例中,承载收放件4基本呈v形结构,笼式结构的艉部加装有拖网(图未示出),使得笼式结构为一端开口的半封闭结构,该技术方案使得当开展无人潜航器13回收作业时,保证无人潜航器13进入笼式结构后无法滑出且稳定悬停在承载收放件4上(如图1所示)。当然的,承载收放件4也可以是其他形状结构。
34.本实施例中,收放笼主体1底部两侧沿长度方向分别设置有若干第一螺栓孔10,螺栓穿过第一螺栓孔10与承载收放件4互相配合从而将承载收放件4位置可调节地安装在收放笼主体1底部,进而能够可根据作业需要对进行承载收放件4前后位置的调整,以达到最佳的作业间距。
35.本实施例中,浮力筒2为两个,分别互相平行设置在收放笼主体1的左右两侧,且浮力筒2的前后两端呈圆锥形,保证提供足够储备浮力的同时减少航行过程中的阻力。
36.本实施例中,收放笼主体1的两侧分别设置有卡箍12,浮力筒2上具有凹槽,卡箍12与凹槽嵌套配合以将浮力筒2固定安装在收放笼主体1的两侧,通过该捆扎式的安装方式保
证浮力筒2安装的稳固度及可靠性。
37.本实施例中,电力推进器3为两组,两组电力推进器3与两个浮力筒2一一对应,每组电力推进器3有两个,分别设置在对应浮力筒2前后两端的下方,使得在4个电力推进器3在工作时相互配合,保证收放装置整体更易于操控,航行稳定性更好。
38.本实施例中,收放笼主体1采用的是5083-h116型号的铝合金板材,通过铝合金板材进行焊接和加强,保证整体结构强度;收放笼主体1内部折弯处还设置有加强筋9,进一步提高整体结构强度,防止该收放装置在作业中发生变形。
39.本实施例中,还包括多个基座5和吊钩6,每两个基座5对称设置在每一个承载收放件4的底侧,用于实现将收放装置安全平稳的放置于母船甲板上;收放笼主体1顶部沿长度方向设置有若干第二螺栓孔11,螺栓穿过第二螺栓孔11与吊钩6互相配合从而将吊钩6位置可调节地安装在收放笼主体1顶部,进而能够根据吊装的需要人为调整吊钩6的连接位置以达到最佳的吊装平衡。
40.本实施例中的所涉及的螺栓为316l螺栓,更加牢固可靠。
41.本实施例中,电池组7和无线通信部件8安装在收放笼主体1顶部远离水线的位置(如图5中虚线位置为水线位置),以防止被海水侵蚀导致发生故障。
42.本发明所提出的一种遥控式无人潜航器收放装置,具有一体化的结构强度,可以满足绝大多数目前中型无人潜航器的回收和布放要求,即可以作为舰载设备布置在母船上进行随船保障,也可以作为岸基设备布置在岸边,作为专业的遥控式的无人潜航器收放装置使用。本发明操控灵活,储备浮力大,即可以视距内使用,也可以配以视频传输设备进行远距离超视距作业,是一款优良的具有多用途特性的无人作业辅助装备。
43.本发明不作业时,直接通过基座5放置于母船甲板上;在下放无人潜航器13时,需要根据无人潜航器的基本特征选择合适的承载收放件4,并通过调整前后间距,找到一种适合的尺寸以方便收放无人潜航器13。当下放无人潜航器13时,无人潜航器13达到一定吃水后会自由漂浮在水面上,此时无人潜航器13通过自身动力驶出收放笼主体1,然后展开机翼,遂行作业任务。
44.实施例2:本发明无人潜航器回收方法
45.本发明还提供一种无人潜航器回收方法,包括上述任一所述的无人潜航器收放装置,所述的回收方法包括如下步骤:
46.(1)无人潜航器13驶回至收放装置附近;
47.(2)当在视距内开展回收作业,回收工作人员在母船甲板上通过遥控装置在视距范围内操控收放装置,遥控开启电力推进器3,使得收放装置驶向无人潜航器13并与无人潜航器13在水面进行对接,使得无人潜航器13从一端开口进入到笼式结构内,无人潜航器13另外一端开口设置有拖网,避免无人潜航器13进入后滑出;当在视距外开展回收作业时,可在收放装置加装视频装置,以便清晰的看到无人潜航器13回收过程中的笼式结构内外姿态,工作人员在遥控站内通过视频远程操控遥控器使得收放装置驶向无人潜航器13并与无人潜航器13在水面进行对接,进而使得无人潜航器13处于收放装置的笼式结构内;
48.(3)当无人潜航器13位于承载收放件4的上方的对应回收位置后,起吊装置将无人潜航器收放装置吊起,使得无人潜航器13能够稳固悬停在承载收放件4上,无人潜航器13被捕获;
49.(4)起吊装置将无人潜航器收放装置和无人潜航器13吊起移送至母船上,回收完成。
50.尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上对本发明做出的各种变化,均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。