一种基于lstm的雷达目标极化特征提取与识别方法
技术领域
1.本发明涉及一种基于lstm的雷达目标极化特征提取与识别方法,属于雷达目标识别技术领域。
背景技术:
2.近年来,人工神经网络的发展为雷达目标特征提取、识别和分类开辟了一条新路径。典型的人工神经网络包含前馈神经网络和反馈神经网络。前馈神经网络与反馈神经网络相比结构相对简单,是最简单的一种人工神经网络。前馈神经网络能拟合任意函数,但在函数特点上,缺乏一些动态特性。实际上,前馈神经网络处理信息的能力十分有限,能够处理的问题有较大的局限性。反馈神经网络与前馈神经网络相比,则更加贴近于人体的神经网络构造,能够处理更加复杂的和关联性较强的数据,长短时记忆网络(long short-term memory,lstm)模型就属于反馈神经网络中循环神经网络(recurrent neural network,rnn)的一种变式。
3.lstm是rnn的改进,与rnn不同的是,lstm增大了网络存储,采用了特殊的隐式单元,能处理过长信息序列,该特殊单元能长期保存数据,且能与自身连接,来及时保留或更新当前的数据。lstm在当今的应用十分广泛。因其具有长期记忆优势,在语音识别和文字信息识别任务中展现出了特别的优势,因此被大量应用在需求高的语音内容识别和文字恢复技术领域。
4.在雷达目标识别领域,现有识别舰船与角反射器阵列识的方法是根据雷达接收机接收到的雷达回波数据,计算出舰船和角反射器阵列的目标极化形状因子和极化不变量特征数据,然后再利用svm分类器对舰船和角反射器阵列进行识别。而该方法存在特征冗余、特征泛化能力差的问题。当雷达搭载于快速移动的飞行器或军舰上时,需长时间、持续不间断的对收到的回波方向持续跟踪、接收与识别;在此类样本数据量庞大且前后时间关联性强的识别问题中,若在原有极化目标特征提取的基础上,采用lstm神经网络对一段时间内采集到的样本进行关联性学习,就可自动提取高维、抽象特征,以达到更好的识别效果与更好的动态处理能力。
技术实现要素:
5.本发明的目的在于针对现有识别舰船与角反射器阵列识别方法存在特征冗余、特征泛化能力差的问题,尤其针对搭载于快速移动飞行器或军舰上样本数据量庞大且前后时间关联性强的持续跟踪、接收与识别时存在动态处理能力弱、识别效果差的技术缺陷,提出了一种基于lstm的雷达目标极化特征提取与识别方法,解决了使用现有的方法不能有效识别舰船与角反射器的技术缺陷问题。
6.为了达到上述目的,本发明采取如下技术方案:
7.所述雷达目标极化特征提取与识别方法,包括如下步骤:
8.步骤1、根据雷达接收机接收的舰船、角反射器阵列的雷达回波数据,计算出无压
制噪声存在时、不同有源压制干扰干信比的目标极化形状因子和极化不变量特征数据;
9.其中不同有源压制干扰指的是在雷达回波中注入不同强度的干扰信号以使真实的目标回波信号被干扰淹没;
10.其中,极化不变量特征数据包括行列式模值、功率矩阵迹、去极化系数、本征极化方向角、本征极化椭圆率和目标纵横比;
11.步骤2、基于步骤1计算得到的无压制噪声存在时舰船和角反射器阵列的目标极化形状因子和极化不变量特征数据,制作lstm模型的训练数据集;
12.步骤3:将步骤1计算得到的不同有源压制干扰干信比的舰船与角反射器阵列的极化不变量数据作归一化处理,得到归一化处理后的不同有源压制干扰干信比的舰船与角反射器阵列的极化不变量数据;
13.步骤4、基于步骤1计算得到的不同有源压制干扰干信比舰船和角反射器阵列的目标极化形状因子和步骤3得到归一化处理后的不同有源压制干扰干信比的舰船和角反射器阵列的极化不变量数据,制作lstm模型的测试数据集;
14.步骤5、初始化lstm模型的参数,得到lstm模型;
15.其中,lstm模型的参数包括网络层数、激活函数、批尺寸、学习率、正则化参数、损失函数以及训练轮数;
16.步骤6、将步骤2得到的训练数据集输入lstm模型进行训练,得到训练好的lstm模型;
17.步骤7、将步骤4的测试数据集输入步骤6训练好的lstm模型进行测试验证,得到识别结果;
18.至此,从步骤1到步骤7,完成了一种基于lstm的雷达目标极化特征提取与识别方法。
19.有益效果
20.本发明提出的一种基于lstm的雷达目标极化特征提取与识别方法,具有如下有益效果:
21.1.所述雷达目标极化特征提取与识别方法,能在有源压制干扰信号的情况下,对舰船和角反射器阵列有较高的识别率;
22.2.所述雷达目标极化特征提取与识别方法与现有svm分类器相比性能更优异,对舰船和角反射器阵列有更高的识别率,提升了对海探测目标识别效率。
附图说明
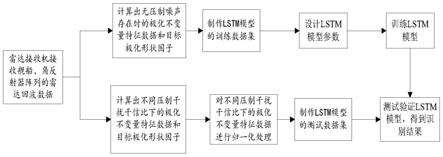
23.图1是本发明一种基于lstm的雷达目标极化特征提取与识别方法的流程图;
24.图2是本发明一种基于lstm的雷达目标极化特征提取与识别方法中识别率示意图;
25.图3是现有基于svm分类器的极化不变量特征提取与识别方法中识别率示意图。
具体实施方式
26.下面结合附图及具体实施例对本发明所述的一种基于lstm的雷达目标极化特征提取与识别方法进行详细阐述。
27.实施例1
28.对于一个据量庞大、且前后时间关联性强的识别过程,即在搭载有雷达的快速移动的飞行器或军舰场景下,需要对收到的回波方向持续跟踪、接收与识别,若采用lstm神经网络对一段时间内采集到的样本进行关联性学习,可达到更好的识别效果与动态处理能力。结合图1基于lstm的雷达目标极化特征提取与识别方法的流程图,本实施例阐述如何实施。
29.步骤1、根据雷达接收机接收的舰船、角反射器阵列的雷达回波数据,计算出无压制噪声存在时、不同有源压制干扰干信比的目标极化形状因子和极化不变量特征数据;
30.其中,不同有源压制干扰指的是在雷达回波中注入不同强度的干扰信号以使真实的目标回波信号被干扰淹没;
31.步骤1具体实施时:根据舰船、角反射器阵列的rcs数据与电磁散射仿真数据,构造出理想环境与干信比分别为0db、3db、6db、9db的有源压制干扰环境中的舰船、角反射器阵列回波,再计算得到无压制噪声存在时舰船和角反射器阵列的目标极化形状因子和极化不变量特征数据;
32.其中,极化不变量特征数据,包括行列式模值|δ|、功率矩阵迹p1、去极化系数d、本征极化方向角本征极化椭圆率τ0和目标纵横比η,且极化不变量特征数据的计算公式如下:
33.在h-v基下,信号的发射电场和散射电场存在的线性关系为:
34.es=[s]eiꢀꢀꢀ
(1)
[0035]
其中,式中ei和es分别入射波和散射波的极化状态,[s]为2
×
2的极化散射阵:
[0036][0037]
式中,s
hh
表示雷达以水平方向发射电磁波,并以水平方向接收雷达回波的电磁波值;s
hv
表示雷达以垂直方向发射电磁波,并以水平方向接收雷达回波的电磁波值;s
vh
表示雷达以水平方向发射电磁波,并以垂直方向接收雷达回波的电磁波值;s
vv
表示雷达以垂直方向发射电磁波,并以垂直方向接收雷达回波的电磁波值。
[0038]
对于互易性目标,可以近似地认为s
hv
≈s
vh
ꢀꢀꢀ
(3)
[0039]
行列式模值|δ|:
[0040]
功率矩阵迹p1:p1=|s
hh
|2 |s
vv
|2 2|s
hv
|2ꢀꢀꢀ
(5)
[0041]
去极化系数d:
[0042]
本征极化方向角本征极化方向角
[0043]
式中,
[0044]
[0045]
本征极化椭圆率τ0:
[0046]
式中,
[0047][0048]
目标横纵比η:
[0049]
目标极化形状因子γ:
[0050]
根据舰船、角反射器阵列的回波数据、目标极化形状因子公式,如公式(12)和极化不变量公式(4)-(11)计算出无压制噪声存在时以及有源压制干扰干信比为0db、3db、6db、9db下的舰船与角反射器阵列的目标极化形状因子和极化不变量特征数据。
[0051]
这些极化不变量特征数据与目标的几何外形直接相关。其中行列式模值|δ|表征了目标物体的物理结构;功率矩阵迹p1表示一对正交极化天线所接收到的总功率,它反映了目标的大小;去极化系数d反映出目标是孤立散射的简单目标还是多散射中心的复杂目标;本征极化方向角反映了目标极化方向;本征极化椭圆率τ0反映了目标对称性的差异;目标纵横比η大致描述了目标的粗细,反映了目标的形状和目标纵向横向物理尺寸之比;目标极化形状因子γ十分敏感于物体的表面形状,与目标纵横比η相比,其对物体表面形状的敏感程度更高。
[0052]
在实际应用中,由于环境因素全极化雷达很难保证对极化相位的测量精度,而本征极化方向角和本征极化椭圆率τ0与相位关系密切,因此选用剩余四个与幅值关联密切的极化不变量特征和目标极化形状作为舰船和角反射器阵列的识别依据。
[0053]
步骤2、基于步骤1计算得到的无压制噪声存在时舰船和角反射器阵列的目标极化形状因子和极化不变量特征数据,制作lstm模型的训练数据集;
[0054]
步骤3、由于添加有源压制噪声之后,行列式模值|δ|与功率矩阵迹p1的值大小发生了一定程度改变,因此将步骤1计算得到的有源压制干扰干信比分别为0db、3db、6db、9db下的舰船与角反射器阵列的极化不变量数据作归一化处理,得到归一化处理后的不同有源压制干扰干信比的舰船和角反射器阵列的极化不变量数据;
[0055]
步骤4、基于步骤1计算得到的有源压制干扰干信比分别为0db、3db、6db、9db下舰船和角反射器阵列的目标极化形状因子和步骤3得到归一化处理后的不同有源压制干扰干信比的舰船和角反射器阵列的极化不变量数据,制作lstm模型的测试数据集;
[0056]
步骤5、初始化lstm模型的参数,得到lstm模型;
[0057]
其中,lstm模型的参数包括网络层数、激活函数、批尺寸、学习率、正则化参数、损失函数以及训练轮数;
[0058]
设置正则化参数为0.5,批尺寸为128,输入张量为(200,1),其他参数设置为sklearn库中lstm的默认参数;
[0059]
步骤6、将步骤2得到的训练数据集输入lstm模型进行训练,到训练好的lstm模型;
[0060]
步骤7、将步骤4的测试数据集输入步骤6训练好的lstm模型进行测试验证,得到识
别结果,如表1和图2所示。
[0061]
表1基于lstm的雷达目标极化特征提取与识别的识别率
[0062][0063]
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。