1.本发明属于施工监测领域,提供了一种基于三维激光扫描的预制墩柱安装位置姿态监测方法。
背景技术:
2.装配式桥梁具有提高施工速度、施工质量易保证、降低交通影响等优势,近些年得到大力发展和运用。预制墩柱与承台的连接部位,往往是弯矩最大位置,也是地震作用下塑性铰易出现的位置,对桥梁整体的安全性和耐久性具有重要影响。因此,施工过程中预制墩柱安装时,需准确测量安装偏差,严格控制拼装质量。
3.目前施工现场大多采用水准仪、经纬仪、全站仪等测量工具来辅助控制结构的准确拼装,但这种测量方式自动化程度低、测量前准备工作复杂,并且需要投入较多的人力、物力,故亟需提高施工现场的测量方式。近些年来,三维激光扫描技术得到迅速的发展,因其具有高精度、非接触式、测量范围广等优势引起广泛关注。但目前尚没有三维扫描在墩柱安装监测中的应用,因此,当前需要一种将三维扫描技术应用到墩柱安装监测的技术,尤其是从扫描获取的点云数据转化为安装偏差值的自动化数据处理方法。
技术实现要素:
4.本发明的目的是提供了一种基于三维激光扫描的预制墩柱安装位置姿态监测方法,从扫描的点云模型中自动提取出预制墩柱的六自由度位置姿态信息,用于检测安装状态的垂直度和水平偏移。
5.本发明采用如下技术方案:
6.本发明所述的基于三维激光扫描的预制墩柱安装位置姿态监测方法,包括以下步骤:
7.步骤1、作为测量准备,按照设计图纸中待安装的桥梁墩柱和承台上预埋钢筋的截面尺寸、长度和构造信息;
8.在cad中建立桥梁墩柱和承台钢筋的三维面模型,作为现场扫描模型的参考,
9.其中桥梁墩柱模型所在坐标系记为墩柱局部坐标系cs
p
,承台钢筋模型所在坐标系记为设计坐标系csr;
10.步骤2、现场放置一台三维扫描仪,保持三维扫描仪在墩柱安装监测过程中其位置不变,使得三维扫描仪在预制墩柱安装前能够监测到桥梁承台上预埋的连接钢筋,在预制桥梁墩柱安装过程中能够监测到桥梁墩柱相邻的两个端面;
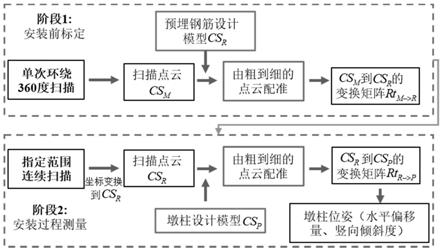
11.步骤3、墩柱安装前,利用三维扫描仪对施工场地进行360度环绕扫描;获得三维扫描仪的扫描点云数据;
12.步骤4、通过对步骤3的三维扫描仪所获的扫描点云数据和步骤1中的承台预埋钢筋的设计模型进行配准,对三维扫描仪的位置姿态进行标定,求解出扫描坐标系csm到设计坐标系csr的三维变换矩阵rt
m-》r
;
13.步骤5、以桥梁墩柱设计模型为参考,计算完整覆盖桥梁墩柱设计位置所需要的扫描范围,即三维扫描仪沿竖向的仰角、沿水平方向的方位角的起始和结束值;
14.步骤6、桥梁墩柱开始起吊后,按照步骤5中计算的扫描范围进行三维扫描仪设置,并开始扫描,获得墩柱当前状态的扫描点云数据;
15.步骤7、利用步骤4中三维变换矩阵rt
m-》r
,将步骤6中墩柱的扫描点云数据由扫描坐标系csm变换到步骤1定义的设计坐标系csr;
16.步骤8、将步骤7变换后的扫描点云数据与步骤1的桥梁墩柱设计模型进行配准,对墩柱的局部位置姿态进行计算,求解出设计坐标系csr到墩柱局部坐标系cs
p
的三维变换矩阵rt
r-》p
;
17.步骤9、将设计坐标系csr到墩柱局部坐标系cs
p
的三维变换矩阵rt
r-》p
分解为墩柱底部沿设计坐标系三个坐标轴方向的偏移值以及竖向倾斜角;
18.步骤10、以规范中给出的预制墩柱容许安装偏差为参照,当步骤8中求解出的墩柱偏移值和倾斜角大于容许安装偏差,将测量值反馈给现场施工人员进行安装调整;
19.步骤11、安装调整后重复步骤6-10,直到测量值小于容许安装偏差,判定为完成吊装。
20.本发明所述基于三维激光扫描的预制墩柱安装位置姿态监测方法,将步骤4和步骤8中三维扫描仪所获得的扫描点云与桥梁墩柱或承台钢筋的设计模型采用由粗到精的配准方法进行配准;
21.扫描点云为源点云s,对应坐标系记为css。设计模型为cad建立的三维面模型,利用泊松圆盘采样将三维面模型转化为设计点云模型,记为目标点云t,对应坐标系为cs
t
;进行基于邻域二维点云平滑密度的粗配准,其步骤如下:
22.(4)利用体素化网格滤波器,提取出源点云s和目标点云t各自的三维特征点;
23.(5)对每一三维特征点,分别求解特征点的局部坐标系;对特征点p,选取半径为r
l
的局部球面q内的邻域点集{pi:||p
i-p||≤r
l
},求解邻域点集的协方差矩阵m,
[0024][0025]
其中n为邻域点集pi∈q内的点数;邻域点集中的某个点,
[0026]
利用特征分解,求解特征点p的局部坐标系lcs,局部坐标系lcs中z轴方向为最小特征值的法向量,将垂直于z轴的平面定义为平面l,x轴为所有邻域点投影到平面l的投影向量加权和,y轴由z轴和x轴的交叉乘积获得;
[0027]
(6)源点云s和目标点云t各自的三维特征点对每一特征点,分别求解特征点的二维点云平滑密度矩阵;将特征点p的邻域点集pi∈q变换到局部坐标系,并投影到局部坐标系的xy平面内,转化为二维特征点p'的邻域点集p'i∈q';建立围绕二维特征点p'的二维网格g,其中沿x轴和y轴的网格数均为nv,网格总尺寸为dv。对二维网格g中单个网格中心点c
′
jk
,选取邻域点集g
jk
,领域点集中的点p'
jk
满足到网格中心点c
′
jk
的距离小于2dv/nv,求解出高斯平滑后的二维点云密度,
[0028]
[0029]
其中n
jk
为邻域点集p'
jk
∈g
jk
的点数,σ为高斯平滑的带宽;二维点云密度矩阵尺寸为nv×nv
,所有元素d
jk
按总和为1进行标准化,以适应点云密度的不均匀;将特征点二维平滑点云密度矩阵转化为长度为nv×nv
的特征点列向量;
[0030]
(4)从源点云s和目标点云t中分别提取出特征点的二维平滑点云密度向量;利用ransac全局配准,求解出源点云s和目标点云t的三维变换矩阵rt1,源点云s通过rt1三维变换后的坐标系记为预估目标坐标系目标点云t经过的逆矩阵三维变换后的坐标系记为预估源坐标系
[0031]
(5)将设计面模型按粗配准的变换矩阵rt1的逆矩阵,进行坐标变换,由目标坐标系cs
t
变换到预估源坐标系预估源坐标系将面角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系统计出面片角点仰角θ、方位角的最小值和最大值,设为模拟扫描仪的仰角、方位角起始和结束角度。模拟扫描仪的扫描角分辨率设置为与实际扫描相同,基于光线跟踪法,生成待测物的模拟点云模型t
′s,对应坐标系为利用三维变换矩阵rt1,将模拟点云模型t
′s由预估源坐标系变换到目标坐标系cs
t
,模拟点云模型即为修正后的目标点云t';
[0032]
(6)以预估源坐标系下的模拟点云ts'为参考点集,利用最近点搜索,获取源点云s中每一点在参考点集中的最近点和对应距离;设置相近点距离阈值η=1厘米,将距离低于指定阈值η的点标记为待测物,其余点标记为背景物;剔除背景物,保存仅包含待测物的源点云s';
[0033]
(7)利用trimmed icp算法,对修正后的源点云s'和目标点云t'进行配准,其中,初始变换矩阵设为rt1,考虑真实点云测量误差,点云重合率设为0.8。求解出源点云s'到目标点云t'的精确三维变换矩阵rt;
[0034]
本发明所述基于三维激光扫描的预制墩柱安装位置姿态监测方法,其特征在于,步骤5中的扫描范围计算方法为:
[0035]
将墩柱设计面模型,按预先求解出的三维变换矩阵rt
m-》r
的逆矩阵rt
r-》m
,进行坐标变换,由设计参考坐标系csr变换到扫描仪自身坐标系csm;将墩柱面模型中的角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系统计出面模型角点的仰角θ、方位角的最小值和最大值[θ
min
,θ
max
],给定5
°
的冗余度,扫描范围中仰角起始和结束角度值为[θ
min-5
°
,θ
max
5
°
],方位角起始和结束角度值为
[0036]
有益效果
[0037]
本发明提供的基于三维激光扫描的预制墩柱安装位置姿态监测方法,中的三维扫描仪现场可任意位置架设,无需参考线放样定位,且不需在墩柱上粘贴标志物作为测量参考,因此使用方便、高效。
[0038]
本发明提供的基于三维激光扫描的预制墩柱安装位置姿态监测方法,采用的数据处理方法,能从现场扫描的点云模型中自动提取出当前安装状态下墩柱相对设计位置的水平偏移量和竖向倾斜度,给墩柱安装调整提供数据指导。
[0039]
发明中提出的基于邻域二维点云平滑密度的粗配准方法,考虑预埋钢筋点云中角点和侧边特征点投影到自身局部坐标系具有显著区别,将特征点的三维描述降阶为二维描述,提高计算效率,且对稀疏点云也鲁棒;提出的基于点云生成器和trimmed icp的精配准方法,通过扫描过程模拟和实测点云目标物标记,确保配准中使用的设计点云和实测点云具有高重合度,可实现精确配准。
附图说明
[0040]
图1是本发明的方法的流程图;
[0041]
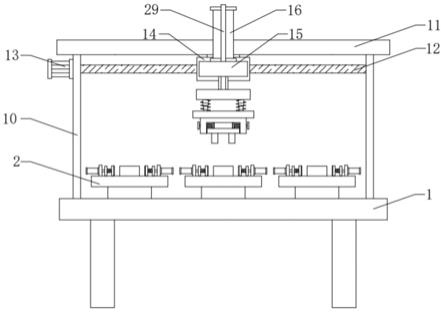
图2是本发明的施工现场示意图;
[0042]
图3是本发明的安装前承台表面预埋钢筋图片及安装过程的现场图;
[0043]
图4是本发明的设计参考坐标系csr、扫描仪自身坐标系csm、墩柱局部坐标系cs
p
的三个坐标系示意;
[0044]
图5是本发明的承台表面预埋钢筋扫描点云中位于角点和侧边的两个特征点提取出的二维平滑点云密度矩阵示意;
[0045]
图6是本发明的预埋钢筋点云模型进行精确配准过程的示意;
[0046]
图7是本发明的墩柱安装逐步测量调整过程中测量所得的墩柱局部坐标系在设计坐标系中的移动轨迹。
具体实施方式
[0047]
为使本发明实施例的目的和技术方案更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0048]
如图所示:一种基于三维激光扫描的预制墩柱安装位置姿态监测方法,包括以下步骤:
[0049]
步骤1、作为测量准备,按照设计图纸中待安装的桥梁墩柱和承台上预埋钢筋的截面尺寸、长度和构造信息;
[0050]
在cad中建立桥梁墩柱和承台钢筋的三维面模型,作为现场扫描模型的参考,
[0051]
其中桥梁墩柱模型所在坐标系记为墩柱局部坐标系cs
p
,承台钢筋模型所在坐标系记为设计坐标系csr;
[0052]
步骤2、现场放置一台三维扫描仪,保持三维扫描仪在墩柱安装监测过程中其位置不变,使得三维扫描仪在预制墩柱安装前能够监测到桥梁承台上预埋的连接钢筋,在预制桥梁墩柱安装过程中能够监测到桥梁墩柱相邻的两个端面;
[0053]
步骤3、墩柱安装前,利用三维扫描仪对施工场地进行360度环绕扫描,;获得三维扫描仪的扫描点云数据;
[0054]
步骤4、通过对步骤3的三维扫描仪所获的扫描点云数据和步骤1中的承台预埋钢筋的设计模型进行配准,对三维扫描仪的位置姿态进行标定,求解出扫描坐标系csm到设计坐标系csr的三维变换矩阵rt
m-》r
;
[0055]
步骤5、以桥梁墩柱设计模型为参考,计算完整覆盖桥梁墩柱设计位置所需要的扫
描范围,即三维扫描仪沿竖向的仰角、沿水平方向的方位角的起始和结束值;
[0056]
扫描范围计算方法为:将墩柱设计面模型,按预先求解出的三维变换矩阵rt
m-》r
的逆矩阵rt
r-》m
,进行坐标变换,由设计参考坐标系csr变换到扫描仪自身坐标系csm;将墩柱面模型中的角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系统计出面模型角点的仰角θ、方位角的最小值和最大值[θ
min
,θ
max
],给定5
°
的冗余度,扫描范围中仰角起始和结束角度值为[θ
min-5
°
,θ
max
5
°
],方位角起始和结束角度值为
[0057]
步骤6、桥梁墩柱开始起吊后,按照步骤5中计算的扫描范围进行三维扫描仪设置,并开始扫描,获得墩柱当前状态的点云模型;
[0058]
步骤7、利用步骤4中三维变换矩阵rt
m-》r
,将步骤6中(墩柱)扫描点云数据由扫描坐标系csm变换到步骤1定义的设计坐标系csr;
[0059]
步骤8、将步骤7变换后的扫描点云数据与步骤1的桥梁墩柱设计模型进行配准,对墩柱的局部位置姿态进行计算,求解出设计坐标系csr到墩柱局部坐标系cs
p
的三维变换矩阵rt
r-》p
;
[0060]
步骤9、将设计坐标系csr到墩柱局部坐标系cs
p
的三维变换矩阵rt
r-》p
分解为墩柱底部沿设计坐标系三个坐标轴方向的偏移值以及沿设计坐标系csr的竖向倾斜角;
[0061]
步骤10、以规范中给出的预制墩柱容许安装偏差为参照,当步骤8中求解出的墩柱偏移值和倾斜角大于容许安装偏差,将测量值反馈给现场施工人员进行安装调整;
[0062]
步骤11、安装调整后重复步骤6-10,直到测量值小于容许安装偏差,判定为完成吊装。
[0063]
本发明中将步骤4和步骤8中三维扫描仪所获得的扫描点云与桥梁墩柱或承台钢筋的设计模型采用由粗到精的配准方法进行配准;
[0064]
扫描点云为源点云s,对应坐标系记为css。设计模型为cad建立的三维面模型,利用泊松圆盘采样将三维面模型转化为设计点云模型,记为目标点云t,对应坐标系为cs
t
;进行基于邻域二维点云平滑密度的粗配准,其步骤如下:
[0065]
(1)利用体素化网格滤波器,提取出源点云s和目标点云t各自的三维特征点;
[0066]
(2)对每一三维特征点,分别求解特征点的局部坐标系;对任一特征点p,选取半径为r
l
的局部球面q内的邻域点集{pi:||p
i-p||≤r
l
},求解邻域点集的协方差矩阵m,
[0067][0068]
其中n为邻域点集pi∈q内的点数;邻域点集中的某个点,利用特征分解,求解特征点p的局部坐标系lcs,局部坐标系lcs中z轴方向为最小特征值的法向量,将垂直于z轴的平面定义为平面l,x轴为所有邻域点投影到平面l的投影向量加权和,y轴由z轴和x轴的交叉乘积获得;
[0069]
(3)源点云s和目标点云t各自的三维特征点对每一特征点,分别求解特征点的二维点云平滑密度矩阵;将特征点p的邻域点集pi∈q变换到局部坐标系,并投影到局部坐标系的xy平面内,转化为二维特征点p'的邻域点集p'i∈q';建立围绕二维特征点p'的二维网格g,其中沿x轴和y轴的网格数均为nv,网格总尺寸为dv。对二维网格g中单个网格中心点c
′
jk
,选取邻域点集g
jk
,领域点集中的点p'
jk
满足到网格中心点c
′
jk
的距离小于2dv/nv,求解
出高斯平滑后的二维点云密度,
[0070][0071]
其中n
jk
为邻域点集p'
jk
∈g
jk
的点数,σ为高斯平滑的带宽;二维点云密度矩阵尺寸为nv×nv
,所有元素d
jk
按总和为1进行标准化,以适应点云密度的不均匀;将特征点二维平滑点云密度矩阵转化为长度为nv×nv
的特征点列向量;
[0072]
(4)从源点云s和目标点云t中分别提取出特征点的二维平滑点云密度向量;利用ransac全局配准,求解出源点云s和目标点云t的三维变换矩阵rt1,源点云s通过rt1三维变换后的坐标系记为预估目标坐标系目标点云t经过的逆矩阵三维变换后的坐标系记为预估源坐标系
[0073]
进行基于点云生成器和trimmed icp的精配准。目标点云t为待测物体设计状态下所有表面采样后的点云,未考虑扫描仪测量过程中待测物体部分被遮挡而测量不完整的情况。源点云s为现场扫描模型,除待测物体外,还包含多种背景物。因此,源点云s与目标点云t具有低重合度,可能造成配准不精确。因为,采用模拟点云生成器,重新生成目标点云t';采用最近点搜索,提取出源点云s中待测物体对应点云s';利用trimmed icp算法,对修正后的源点云s'和目标点云t'进行精确配准具体步骤如下:
[0074]
(5)将设计面模型按粗配准的变换矩阵rt1的逆矩阵,进行坐标变换,由目标坐标系cs
t
变换到预估源坐标系预估源坐标系将面片角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系统计出面片角点仰角θ、方位角的最小值和最大值,设为模拟扫描仪的仰角、方位角起始和结束角度。模拟扫描仪的扫描角分辨率设置为与实际扫描相同,不考虑测量误差,基于光线跟踪法,生成待测物的模拟点云模型t
′s,对应坐标系为利用三维变换矩阵rt1,将模拟点云模型t
′s由预估源坐标系变换到目标坐标系cs
t
,模拟点云模型即为修正后的目标点云t';
[0075]
(6)以预估源坐标系下的模拟点云ts'为参考点集,利用最近点搜索,获取源点云s中每一点在参考点集中的最近点和对应距离;设置相近点距离阈值η=1cm,将距离低于指定阈值η的点标记为待测物,指定阈值η=1cm,其余点标记为背景物;剔除背景物,保存仅包含待测物的源点云s';
[0076]
(7)利用trimmed icp算法,对修正后的源点云s'和目标点云t'进行配准,其中,初始变换矩阵设为rt1,考虑真实点云测量误差,点云重合率设为0.8。求解出源点云s'到目标点云t'的精确三维变换矩阵rt。
[0077]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。