技术特征:
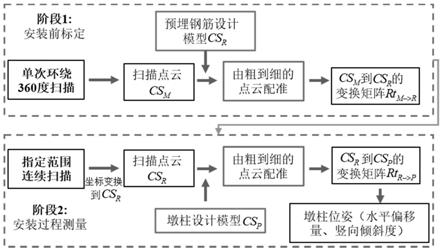
1.一种基于三维激光扫描的预制墩柱安装位置姿态监测方法,其特征在于:包括以下步骤:步骤1、作为测量准备,按照设计图纸中待安装的桥梁墩柱和承台上预埋钢筋的截面尺寸、长度和构造信息;在cad中建立桥梁墩柱和承台钢筋的三维面模型,作为现场扫描模型的参考,其中桥梁墩柱模型所在坐标系记为墩柱局部坐标系cs
p
,承台钢筋模型所在坐标系记为设计坐标系cs
r
;步骤2、现场放置一台三维扫描仪,保持三维扫描仪在墩柱安装监测过程中其位置不变,使得三维扫描仪在预制墩柱安装前能够监测到桥梁承台上预埋的连接钢筋,在预制桥梁墩柱安装过程中能够监测到桥梁墩柱相邻的两个端面;步骤3、墩柱安装前,利用三维扫描仪对施工场地进行360度环绕扫描,获得三维扫描仪的扫描点云数据;步骤4、通过对步骤3的三维扫描仪所获的扫描点云数据和步骤1中的承台预埋钢筋的设计模型进行配准,对三维扫描仪的位置姿态进行标定,求解出扫描坐标系cs
m
到设计坐标系cs
r
的三维变换矩阵rt
m->r
;步骤5、以桥梁墩柱设计模型为参考,计算完整覆盖桥梁墩柱设计位置所需要的扫描范围,即三维扫描仪沿竖向的仰角、沿水平方向的方位角的起始和结束值;步骤6、桥梁墩柱开始起吊后,按照步骤5中计算的扫描范围进行三维扫描仪设置,并开始扫描,获得墩柱当前状态的扫描点云数据;步骤7、利用步骤4中三维变换矩阵rt
m->r
,将步骤6中墩柱扫描点云数据由扫描坐标系cs
m
变换到步骤1定义的设计坐标系cs
r
;步骤8、将步骤7变换后的扫描点云数据与步骤1的桥梁墩柱设计模型进行配准,对墩柱的局部位置姿态进行计算,求解出设计坐标系cs
r
到墩柱局部坐标系cs
p
的三维变换矩阵rt
r->p
;步骤9、将设计坐标系cs
r
到墩柱局部坐标系cs
p
的三维变换矩阵rt
r->p
分解为墩柱底部沿设计坐标系三个坐标轴方向的偏移值以及竖向倾斜角;步骤10、以规范中给出的预制墩柱容许安装偏差为参照,当步骤8中求解出的墩柱偏移值和倾斜角大于容许安装偏差,将测量值反馈给现场施工人员进行安装调整;步骤11、安装调整后重复步骤6-10,直到测量值小于容许安装偏差,判定为完成吊装。2.根据权利要求1所述基于三维激光扫描的预制墩柱安装位置姿态监测方法,其特征在于,将步骤4和步骤8中三维扫描仪所获得的扫描点云与桥梁墩柱或承台钢筋的设计模型采用由粗到精的配准方法进行配准;扫描点云为源点云s,对应坐标系记为cs
s
。设计模型为cad建立的三维面模型,利用泊松圆盘采样将三维面模型转化为设计点云模型,记为目标点云t,对应坐标系为cs
t
;进行基于邻域二维点云平滑密度的粗配准,其步骤如下:(1)利用体素化网格滤波器,提取出源点云s和目标点云t各自的三维特征点;(2)对每一三维特征点,分别求解特征点的局部坐标系;对特征点p,选取半径为r
l
的局部球面q内的邻域点集{p
i
:||p
i-p||≤r
l
},求解邻域点集的协方差矩阵m,
其中n为邻域点集p
i
∈q内的点数;邻域点集中的某个点,利用特征分解,求解特征点p的局部坐标系lcs,局部坐标系lcs中z轴方向为最小特征值的法向量,将垂直于z轴的平面定义为平面l,x轴为所有邻域点投影到平面l的投影向量加权和,y轴由z轴和x轴的交叉乘积获得;(3)源点云s和目标点云t各自的三维特征点对每一特征点,分别求解特征点的二维点云平滑密度矩阵;将特征点p的邻域点集p
i
∈q变换到局部坐标系,并投影到局部坐标系的xy平面内,转化为二维特征点p'的邻域点集p'
i
∈q';建立围绕二维特征点p'的二维网格g,其中沿x轴和y轴的网格数均为n
v
,网格总尺寸为d
v
。对二维网格g中单个网格中心点c’jk
,选取邻域点集g
jk
,领域点集中的点p'
jk
满足到网格中心点c’jk
的距离小于2d
v
/n
v
,求解出高斯平滑后的二维点云密度,其中n
jk
为邻域点集p'
jk
∈g
jk
的点数,σ为高斯平滑的带宽;二维点云密度矩阵尺寸为n
v
×
n
v
,所有元素d
jk
按总和为1进行标准化,以适应点云密度的不均匀;将特征点二维平滑点云密度矩阵转化为长度为n
v
×
n
v
的特征点列向量;(4)从源点云s和目标点云t中分别提取出特征点的二维平滑点云密度向量;利用ransac全局配准,求解出源点云s和目标点云t的三维变换矩阵rt1,源点云s通过rt1三维变换后的坐标系记为预估目标坐标系目标点云t经过的逆矩阵三维变换后的坐标系记为预估源坐标系(5)将设计面模型按粗配准的变换矩阵rt1的逆矩阵,进行坐标变换,由目标坐标系cs
t
变换到预估源坐标系预估源坐标系将面角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系(r,θ,),统计出面片角点仰角θ、方位角的最小值和最大值,设为模拟扫描仪的仰角、方位角起始和结束角度。模拟扫描仪的扫描角分辨率设置为与实际扫描相同,基于光线跟踪法,生成待测物的模拟点云模型t’s
,对应坐标系为利用三维变换矩阵rt1,将模拟点云模型t’s
由预估源坐标系变换到目标坐标系cs
t
,模拟点云模型即为修正后的目标点云t';(6)以预估源坐标系下的模拟点云t'
s
为参考点集,利用最近点搜索,获取源点云s中每一点在参考点集中的最近点和对应距离;设置相近点距离阈值η=1厘米,将距离低于指定阈值η的点标记为待测物,其余点标记为背景物;剔除背景物,保存仅包含待测物的源点云s';(7)利用trimmedicp算法,对修正后的源点云s'和目标点云t'进行配准,其中,初始变换矩阵设为rt1,考虑真实点云测量误差,点云重合率设为0.8。求解出源点云s'到目标点云t'的精确三维变换矩阵rt。3.根据权利要求1所述基于三维激光扫描的预制墩柱安装位置姿态监测方法,其特征
在于,步骤5中的扫描范围计算方法为:将墩柱设计面模型,按的三维变换矩阵rt
m->r
的逆矩阵rt
r->m
,进行坐标变换,由设计参考坐标系cs
r
变换到扫描仪自身坐标系cs
m
;将墩柱面模型中的角点由三维笛卡尔坐标系(x,y,z)转化为球坐标系(r,θ,),统计出面模型角点的仰角θ、方位角的最小值和最大值[θ
min
,θ
max
],
技术总结
本发明属于施工监测领域,提供了一种基于三维激光扫描的预制墩柱安装位置姿态监测方法。以待安装的桥梁墩柱和承台上预埋钢筋的三维面模型,作为现场扫描模型的参考,建立墩柱局部坐标系及设计坐标系;利用三维扫描仪对施工场地进行360度环绕扫描,获得三维扫描仪的扫描点云数据;计算得到三维变换矩阵;以三维变换矩阵定义的设计坐标系;以规范中给出的预制墩柱容许安装偏差为参照,将测量值反馈给现场施工人员进行安装调整;直到测量值小于容许安装偏差,判定为完成吊装。本发明的三维扫描仪现场可任意位置架设,无需参考线放样定位,且不需在墩柱上粘贴标志物作为测量参考,因此使用方便、高效。高效。高效。
技术研发人员:徐燕 骆义 张建
受保护的技术使用者:东南大学
技术研发日:2021.12.29
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。