基于cnn方法的人工智能四维地震反演方法
技术领域
1.本发明涉及油气勘探技术领域,具体涉及基于cnn方法的人工智能四维地震反演方法。
背景技术:
2.四维地震是一种现场规模的储集层监测技术。它是在同一区块、相同采集条件下、不同时间重复采集的三维地震数据体。把不同时间内采集的地震数据进行对比分析,存在差异的部分就是油藏流体变化的部分。该技术不仅可以监测地下流体边界位置的变化和注入流体的运动,而且可以探测死油区,指导油田开发井的合理布局,预测剩余油的分布等,最终提高采收率。通过分析重复采集地震资料的差异来推测油藏物性变化,实现对油藏的动态监测,监测油藏是老油田增加可采储量和提高采收率的重要手段。
3.基于相关法的四维地震反演结果极不稳定,高度依赖处理时间窗口大小。随着不同处理人员所选的时窗长度不同而呈现不同的反演结果,即当时移量不为0时所表示的地震波纵波在流体中传播速度变化范围边界,会跟随着时窗长度上下移,这样就不能准确的判断地震波纵波在地层流体中传播速度的变化范围。基于相关法的四维地震反演结果只能大致反演油藏速度变化的范围并不能帮助解释人员准确确定地震波纵波在油藏中流体传播速度变化率。同时也不能够很好地反演出地震波纵波在地层流体中传播横向上与纵向上很小的速度变化值,即分辨率不高。
技术实现要素:
4.本发明的目的在于提供基于cnn方法的人工智能四维地震反演方法,解决现有预测方法分辨率低、准确度低的问题。
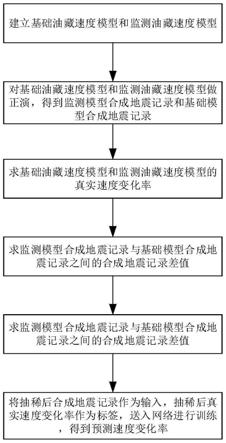
5.为实现上述发明目的,本发明所采用的技术方案是:基于cnn方法的人工智能四维地震反演方法,包括以下步骤:
6.建立四维地震测量的基础油藏速度模型和监测油藏速度模型;
7.对基础油藏速度模型和监测油藏速度模型做正演,得到监测模型合成地震记录和基础模型合成地震记录;
8.求基础油藏速度模型和监测油藏速度模型的真实速度变化率;
9.求监测模型合成地震记录与基础模型合成地震记录之间的合成地震记录差值;
10.对合成地震记录差值和真实速度变化率进行抽稀构建训练集,得到抽稀后合成地震记录、抽稀后真实速度变化率;
11.将抽稀后合成地震记录作为输入,抽稀后真实速度变化率作为标签,送入网络进行训练,得到预测速度变化率。
12.优选地,所述基础油藏速度模型与监测油藏速度模型是以相同的采集方式在前后不同的时间采集同一区域的地震数据。
13.优选地,所述真实速度变化率的目标函数为:
[0014][0015]
其中,vm代表监测模型的深度域速度模型,vb代表基础模型的深度域速度模型,λ代表速度变化率。
[0016]
优选地,所述合成地震记录差值的目标函数为:
[0017]
δs=s
m-sb;
[0018]
其中,sm代表监测模型的合成地震记录,sb代表基础模型的合成地震记录,δs代表合成地震记录差值。
[0019]
优选地,还包括真实速度变化率和预测速度变化率的误差分析,误差分析的目标函数为:
[0020][0021]
其中,v
p
代表预测的速度变化率,vr代表真实的速度变化率,μ代表误差值。
[0022]
本发明的有益效果集中体现在:
[0023]
1、本发明的方法避免了求解各种复杂的地球物理算法以及传统四维地震反演的多解性,适用于同一区块、相同采集条件下、不同时间重复采集的三维地震数据体。
[0024]
2、本发明将人工智能与地球物理结合,直接通过卷积神经网络对训练集的学习建立地震波纵波在油藏流体中传播速度变化率与合成地震记录之间的非线性关系,通过二者的非线性关系进行四维地震反演,预测速度变化率模型。
[0025]
3、本发明与传统四维地震反演相比,可准确寻找剩余油气藏,提高采收率,实施油藏动态监测,能极大的提高工作效率和反演稳定性。
附图说明
[0026]
图1为本发明的设计方案流程图;
[0027]
图2为建立的基础模型的深度域速度模型;
[0028]
图3为建立的监测模型的深度域速度模型;
[0029]
图4为基础模型的合成地震记录;
[0030]
图5为监测模型的合成地震记录;
[0031]
图6为真实速度变化率模型;
[0032]
图7为合成地震记录差值;
[0033]
图8为合成地震记录差值抽稀后的图;
[0034]
图9为真实速度变化率抽稀后的图;
[0035]
图10为利用不同大小的训练集训练的卷积神经网络预测值的误差分析图。
具体实施方式
[0036]
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
[0037]
如图1-10所示,基于cnn方法的人工智能四维地震反演方法,包括以下步骤:
[0038]
a、建立四维地震测量的基础油藏速度模型和监测油藏速度模型;所述基础油藏速度模型与监测油藏速度模型是以相同的采集方式在前后不同的时间采集同一区域的地震数据,例如开采前的油藏速度模型和开采后的油藏速度模型,开采前的油藏速度模型为基础油藏速度模型,开采后的油藏速度模型为监测油藏速度模型,如图2-3所示。
[0039]
b、将深度域的基础油藏速度模型和深度域的监测油藏速度模型分别做时深转换,再利用褶积雷克子波正演,得到监测模型合成地震记录和基础模型合成地震记录,如图4-5所示。
[0040]
其中,地震正演具体为:利用节点仪所采集的地震波在地下传播的速度值,建立地下地质模型,根据地震波在地下介质中的传播原理,通过数学方法,正演模拟计算出所建立地质模型的地震记录;地震模型正演的基础在于不同的岩层具有不同的速度和密度,速度和密度的乘积为波阻抗;波阻抗的差异会产生反射系数;假设地震波是垂直入射的,则可计算法线入射的反射系数:
[0041][0042]
其中,r表示反射系数;ρ1v1,ρ2v2表示相邻两层的波阻抗;
[0043]
地震子波也是地震模型正演中的一个重要参数;实际地震记录从激发、传播到接收,相当于经历了一个滤波系统,一个尖锐的脉冲通过大地滤波系统之后,就变成了一个有一定延续长度的脉冲波形,即地震子波ω
t
,而正演合成地震记录的过程即地震波子波与反射系数做褶积求反射波振幅的过程:
[0044]yt
=ω
t
*r
t
;
[0045]
其中,ω
t
表示地震子波;r
t
表示反射系数;y
t
表示合成地震记录;
[0046]
在地震模型正演中,一般选择褶积雷克子波做正演,其获得的结果与实际地震记录能够较好地吻合。
[0047]
c、求基础油藏速度模型和监测油藏速度模型的真实速度变化率;所述真实速度变化率的目标函数为:
[0048][0049]
其中,vm代表监测模型的深度域速度模型,vb代表基础模型的深度域速度模型,λ代表速度变化率。
[0050]
d、求监测模型合成地震记录与基础模型合成地震记录之间的合成地震记录差值;所述合成地震记录差值的目标函数为:
[0051]
δs=s
m-sb;
[0052]
其中,sm代表监测模型的合成地震记录,sb代表基础模型的合成地震记录,δs代表合成地震记录差值。
[0053]
e、对合成地震记录差值和真实速度变化率进行抽稀,利用相同的抽稀方法对真实速度变化率进行抽稀构建训练集,得到抽稀后合成地震记录、抽稀后真实速度变化率;例如:在横向上每隔15个地震道抽取一道,共抽取200道地震道,得到图8、图9。
[0054]
f、建立抽稀后的合成地震记录差值与真实速度变化率之间一一对应关系,将抽稀后合成地震记录作为输入,抽稀后真实速度变化率作为标签,送入卷积神经网络进行训练,
得到预测速度变化率;
[0055]
速度变化率的模型具体为:计算油藏开采前后流体在油藏中传播速度变化率的大小,设vb表示油藏开采前(即基础模型)在地表某一位置,在深度范围内纵向上每个位置的速度值大小,vm表示油藏开采后(即监测模型)在地表同一位置,在深度范围内纵向上每个位置的速度值大小。公式表达如下:
[0056]
δv=v
m-vb;
[0057][0058]
其中,vm代表监测模型的深度域速度模型;vb代表基础模型的深度域速度模型;δv代表速度大小;λ代表速度变化率。
[0059]
进一步地,还包括真实速度变化率和预测速度变化率的误差分析,误差分析的目标函数为:
[0060][0061]
其中,v
p
代表预测的速度变化率,vr代表真实的速度变化率,μ代表误差值;
[0062]
具体地,将抽稀后得到的300道、200道、150道、100道、50道、25道合成地震记录差值与真实速度变化率送入卷积神经网络进行训练,得到6个不同的训练卷积神经网络模型,利用这6个模型进行预测,计算预测的速度变化率与真实值的速度变化率之间的误差,得到误差值,如图9所示。
[0063]
本发明的方法避免了求解各种复杂的地球物理算法以及传统四维地震反演的多解性,适用于同一区块、相同采集条件下、不同时间重复采集的三维地震数据体。
[0064]
并且,本发明将人工智能与地球物理结合,直接通过卷积神经网络对训练集的学习建立地震波纵波在油藏流体中传播速度变化率与合成地震记录之间的非线性关系,通过二者的非线性关系进行四维地震反演,预测速度变化率模型。
[0065]
从图10中可以看出,随着训练集的样本数目增加,基于卷积神经网络的四维地震反演效果更稳定,分辨率更高。能够更加准确地预测出油藏开采前后流体在油藏中每个位置传播速度变化率的大小,以及能够更加精准地预测出油藏开采后油藏中流体位置发生相对变化的范围边界。
[0066]
其次,本发明与传统四维地震反演相比,可准确寻找剩余油气藏,提高采收率,实施油藏动态监测,能极大的提高工作效率和反演稳定性。
[0067]
需要说明的是,对于前述的各个方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本技术并不受所描述的动作顺序的限制,因为依据本技术,某一些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和单元并不一定是本技术所必须的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。