1.本技术涉及传感器技术领域,尤其涉及一种雷达系统及车辆。
背景技术:
2.随着自动驾驶技术的发展,对车载传感器的感知能力提出了更高的要求。对于车载雷达来说,为了提升目标测量精度和目标分辨能力,通常从距离分辨率、速度分辨率和角度分辨率三个维度提升雷达的分辨率。其中,提升角度分辨率可以通过多入多出(multiple input multiple output,mimo)虚拟阵列的方式增大虚拟孔径实现,即通过多个发射通道和多个接收通道虚拟出更大的阵列,增大天线的孔径以获得更高的角度分辨率。
3.示例性地,现有技术中采用的阵列方案可以如图1所示。在该方案中,发射天线阵列1和发射天线阵列2均包含3*8个发射阵元,以形成48个发射通道;接收天线阵列1和接收天线阵列2均包含1*24个接收阵元,以形成48个接收通道。采用图1所示的天线排布方式,发射天线阵列和接收天线阵列可以虚拟出一个包含48*48个虚拟通道的均匀平面阵列,如图2所示。在图2所示的均匀平面阵列中包括144*16个虚拟通道,其中,水平方向的虚拟通道数为24*6=144,垂直方向的虚拟通道数为8*2=16。
4.采用图1所示的方案,由于虚拟天线阵列为均匀的平面阵列,其水平方向和垂直方向的角度匹配简单,因而为了在水平方向和垂直方向达到较高的分辨率,需要设置较多的发射阵元和接收阵元。设置较多的天线,会增加设计和加工难度,同时也会增加成本。
5.综上,亟需一种雷达系统,在获得较高角度分辨率的前提下,减少发射阵元和接收阵元的数量,从而达到减少设计和加工难度。
技术实现要素:
6.本技术实施例提供了一种雷达系统及车辆,用以在获得较高角度分辨率的前提下,减少发射阵元和接收阵元的数量,从而达到减少设计和加工难度。
7.第一方面,本技术实施例提供了一种雷达系统,该雷达系统包括:发射器,用于发射雷达信号;接收器,用于接收雷达信号经目标反射后的回波信号;其中,发射器中的发射天线阵列和接收器中的接收天线阵列用于形成虚拟线性阵列和虚拟平面阵列,虚拟线性阵列中包括在第一方向上的均匀线阵,虚拟平面阵列中包括均匀面阵;均匀线阵中相邻两个阵元之间的第一间距小于均匀面阵中在第一方向上相邻的两个阵元之间的第二间距。
8.其中,雷达信号为调频连续波fmcw、多频移键控mfsk、调相连续波pmcw中的任一种。回波信号可用于确定目标的水平方位角和垂直方位角。
9.其中,第一方向可以为水平方向或垂直方向。若第一方向为水平方向,则虚拟线性阵列用于确定目标的水平方位角测量值,虚拟平面阵列用于确定目标的垂直方位角测量值和水平方位角测量值;若第一方向为垂直方向,则虚拟线性阵列用于确定目标的垂直方位角测量值,虚拟平面阵列用于确定目标的垂直方位角测量值和水平方位角测量值。在本技术的附图及示例中,以第一方向为水平方向为例进行示意。
10.在第一方面提供的雷达系统中,由于密集的均匀线阵可以保证在第一方向上较大的视场角fov,因而可以使得通过均匀线阵对第一方向对应的方位角(例如水平方位角)进行解算(即根据虚拟天线阵列中每个阵元的观测结果计算目标的方位角)时的解算结果更为准确。同时,由于均匀线阵可以满足第一方向上的fov要求,因此均匀面阵中阵元间在第一方向上的间距可以设置得较大(fov较小,那么在均匀线阵的fov范围内多个角度方向可能会混叠),配合均匀线阵的fov获得第一方向上的正确角度信息。也就是说,对应均匀面阵而设置的天线阵列中可以仅包括数量较少的阵元,从而到达减少发射阵元和接收阵元的数量。当均匀线阵和均匀面阵在第一方向上的口径相同时,均匀线阵和均匀阵在第一方向上获得的角度分辨率相同。当均匀线阵在第一方向上的口径大于均匀面阵在第一方向上的口径,均匀线阵在第一方向上获得的角度分辨率更高,可以把在均匀线阵中获得的更高的第一方向的角度信息代入均匀面阵中,解算第二方向(例如可以是垂直方向)上的角度信息。
11.因此,采用第一方面提供的雷达系统,可以通过发射天线阵列和接收天线阵列虚拟出一个虚拟线性阵列和一个虚拟平面阵列由于虚拟线性阵列和虚拟平面阵列在第一方向上的阵元密度不同(第一间距小于第二间距),因而通过虚拟线性阵列和虚拟平面阵列分别计算第一方向对应的方位角时可以获得不同fov:虚拟线性阵列在第一方向的fov比虚拟平面阵列在第一方向的fov更大,通过虚拟线性阵列计算得到的第一方向的方位角的结果更为准确。因此,通过虚拟线性阵列和虚拟平面阵列这两个阵列的观测结果确定目标的方位角时,可以实现不同fov的匹配。由于两个虚拟阵列的匹配度比现有技术中的虚拟天线阵列的匹配度复杂,因而可以通过在发射器和接收器中设置较少数量的天线实现本技术中的虚拟线性阵列和虚拟平面阵列。此外,由于虚拟线性阵列和虚拟平面阵列的匹配度复杂,因而通过对两个阵列的解算可以获得较高的角度分别率。也就是说,采用第一方面提供的方案,可以通过较少的发射天线和接收天线实现目标的垂直方位角和水平方位角的高分辨率的解算,从而在提高雷达系统的角度分辨率的情况下,降低天线阵列的设计和加工难度,同时减少雷达系统的成本。
12.在一种可能的设计中,第一间距为d1,第二间距为d2,d1和d2满足如下关系:
13.m*d1=n*d2;
14.其中,m和n均为正整数,m>n。采用这种方式,可以使得工程运算更为简单。
15.在一种可能的设计中,第一间距小于或等于雷达信号的载波波长的一半。在这种情况下,利用虚拟线性阵列确定目标的水平方位角测量值时不会出现角度模糊的情况,因而在确定目标的水平方位角时的解算方式更为简便。
16.此外,第一方面提供的雷达系统还可以包括处理单元,该处理单元用于根据回波信号确定目标的水平方位角和垂直方位角。通过处理单元可以确定目标的水平方位角和垂直方位角,从而帮助系统对目标的位置进行判断,进而根据目标位置进行相应操作(例如规划自动驾驶的路线)。
17.具体地,处理单元确定目标的水平方位角和垂直方位角的方式可以是:根据回波信号分别确定虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果;根据虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果确定目标的水平方位角和垂直方位角。也就是说,接收天线阵列接收到回波信号后,处理单元403根据接收天线阵列中每个接收天线接收到的信号,可以解算出虚拟线性阵列对雷达
信号的观测结果以及虚拟平面阵列对雷达信号的观测结果。这两种观测结果可以用于解算目标的水平方位角和垂直方位角。
18.在一种可能的设计中,处理单元具体用于:根据虚拟线性阵列对雷达信号的观测结果确定目标的第一候选水平方位角;根据虚拟平面阵列对雷达信号的观测结果确定目标的第二候选水平方位角以及候选垂直方位角;根据第一候选水平方位角、第二候选水平方位角以及候选垂直方位角确定目标的水平方位角和垂直方位角。采用上述方案,可以结合虚拟线性阵列和虚拟平面阵列对回波信号的观测结果,确定目标的水平方位角和垂直方位角。
19.其中,处理单元可以根据虚拟线性阵列对雷达信号的观测结果,通过数字波束合成dbf或者快速傅里叶变换fft方式确定第一候选水平方位角。
20.同样地,处理单元可以根据虚拟平面阵列对雷达信号的观测结果,通过dbf或者fft方式确定第二候选水平方位角和候选垂直方位角。
21.利用虚拟线性阵列确定目标的水平方位角测量值可能会出现角度模糊的情况,即第一候选水平方位角可能包括多个方位角,其中仅有部分水平方位角是目标的真实水平方位角。此外,由于虚拟平面阵列中水平方向上虚拟通道间的间隔比较大,仅靠虚拟平面阵列得到的第二候选水平方位角θ2是存在模糊的。如果通过虚拟线性阵列测量得到的第一候选水平方位角θ1无模糊,将θ1代入虚拟平面阵列的响应矩阵中可以直接求得目标的二维角度信息如果通过线阵测量得到的第一候选水平方位角θ1存在模糊,则需要联合第一候选水平方位角θ1和第二候选水平方位角θ2,利用中国余数定理确定目标的真实水平方位角θ。然后,再将θ代入虚拟平面阵列的响应矩阵中求得目标的二维角度信息
22.在一种可能的设计中,目标的水平方位角包括第一水平方位角和第二水平方位角,目标的垂直方位角包括第一垂直方位角和第二垂直方位角;处理单元还用于:确定第一水平方位角对应的雷达散射截面积rcs大于第二水平方位角对应的rcs;确定第一垂直方位角对应的rcs大于第二垂直方位角对应的rcs;确定第一水平方位角和第一垂直方位角为目标中的第一子目标的位置,第二水平方位角和第二垂直方位角为目标中的第二子目标的位置。采用上述方案,可以在雷达系统周围存在多个目标时,对每个目标的水平方位角和垂直方位角进行匹配:若解算得到两个水平方位角以及两个垂直方位角(即存在两个目标),则对应rcs较大的水平方位角和垂直方位角为一组,代表其中一个目标的二维角度信息;对应rcs较小的水平方位角和垂直方位角为一组,代表另一个目标的二维角度信息。
23.第一方面提供的雷达系统中,发射天线阵列可以包括垂直发射天线阵列和水平发射天线阵列组成。其中,水平发射天线阵列和接收天线阵列形成虚拟线性阵列,垂直发射天线阵列和接收天线阵列形成虚拟平面阵列。采用上述方案,提供了一种形成虚拟线性阵列和虚拟平面阵列的天线阵列的实现方式。
24.实际应用中,在发射天线阵列和接收天线阵列的位置已经确定的情况下,虚拟天线阵列的位置是可以唯一确定的:假设pm是ntx个发射天线中天线m(m=0,1,
…
,ntx-1)的坐标,qn是nrx个接收天线中天线n,(n=0,1,
…
,nrx-1)的坐标位置,那么形成的虚拟天线阵列中阵元的位置可以由pm qn唯一确定,在m遍历ntx个发射天线、n遍历nrx个接收天线后即可确定虚拟天线阵列的位置。
25.具体应用到第一方面提供的雷达系统中,通过遍历水平发射天线阵列中的发射天
线和接收天线阵列中的接收天线,可以唯一确定虚拟线性阵列的位置;通过遍历垂直发射天线阵列中的发射天线和接收天线阵列中的接收天线,可以唯一确定虚拟平面阵列的位置。因此,对虚拟线性阵列以及虚拟平面阵列的位置限定,也可以视为是对真实的发射天线阵列和接收天线阵列的位置限定。
26.实际实现时,由于芯片的管脚和颗粒不同,发射天线阵列和接收天线阵列可以有不同的实现方式,下面列举其中的两种。
27.第一种
28.接收天线阵列包括沿水平方向单排排布的k个接收阵元;垂直发射天线阵列包括分别位于接收天线阵列两侧的第一发射天线阵列和第二发射天线阵列,第一发射天线阵列和第二发射天线阵列均包括沿垂直方向单排排布的m个发射阵元;水平发射天线阵列包括分别与第一发射天线阵列和第二发射天线阵列邻接的第三发射天线阵列和第四发射天线阵列,第三发射天线阵列和第四发射天线阵列均包括沿水平方向单排排布的n个发射阵元。采用第一种实现方式,虚拟线性阵列包括2*n*k个沿水平方向单排排布的虚拟通道;虚拟平面阵列包括2*m*k个虚拟通道,其中水平方向的虚拟通道数为2*k,垂直方向的虚拟通道数为m。
29.第二种
30.接收天线阵列包括沿水平方向单排排布的k个接收阵元;垂直发射天线阵列位于接收阵列的一侧,垂直发射天线阵列包括沿垂直方向单排排布的m个发射阵元;水平发射天线阵列与垂直发射天线阵列邻接,水平发射天线阵列包括沿水平方向单排排布的n个发射阵元。采用第二种实现方式,虚拟线性阵列包括n*k个沿水平方向单排排布的虚拟通道;虚拟平面阵列包括m*k个虚拟通道,其中水平方向的虚拟通道数为k,垂直方向的虚拟通道数为m。
31.第二方面,本技术实施例提供了一种车辆,该车辆包括上述第一方面及其任一种可能的设计中提供的雷达系统以及电子控制单元ecu。其中,雷达系统用于:发射雷达信号;接收雷达信号经目标反射后的回波信号;根据回波信号确定目标的水平方位角和垂直方位角;ecu用于:根据目标的水平方位角和垂直方位角确定车辆的行使路线。
32.采用第二方面提供的车辆,可以通过雷达系统对目标的位置的测量,实现行驶路线的规划,进而实现自动驾驶。
附图说明
33.图1为现有技术提供的一种雷达天线阵列方案的示意图;
34.图2为现有技术提供的一种虚拟天线阵列的示意图;
35.图3为本技术实施例提供的一种mimo雷达的结构示意图;
36.图4为本技术实施例提供的一种雷达系统的结构示意图;
37.图5为本技术实施例提供的第一种虚拟天线阵列的示意图;
38.图6为本技术实施例提供的一种雷达系统中的天线阵列的示意图;
39.图7为本技术实施例提供的第二种虚拟天线阵列的示意图;
40.图8为本技术实施例提供的另一种雷达系统中的天线阵列的示意图;
41.图9为本技术实施例提供的第三种虚拟天线阵列的示意图;
42.图10为本技术实施例提供的另一种雷达系统的结构示意图;
43.图11为本技术实施例提供的第一种虚拟线性阵列和虚拟平面阵列的响应示意图;
44.图12为本技术实施例提供的第二种虚拟线性阵列和虚拟平面阵列的响应示意图;
45.图13为本技术实施例提供的第三种虚拟线性阵列和虚拟平面阵列的响应示意图;
46.图14为本技术实施例提供的第一种虚拟平面阵列的响应示意图;
47.图15为本技术实施例提供的第二种虚拟平面阵列的响应示意图;
48.图16为本技术实施例提供的第四种虚拟线性阵列和虚拟平面阵列的响应示意图;
49.图17为本技术实施例提供的第三种虚拟平面阵列的响应示意图;
50.图18为本技术实施例提供的第四种虚拟平面阵列的响应示意图;
51.图19为本技术实施例提供的第五种虚拟线性阵列和虚拟平面阵列的响应示意图;
52.图20为本技术实施例提供的第五种虚拟平面阵列的响应示意图;
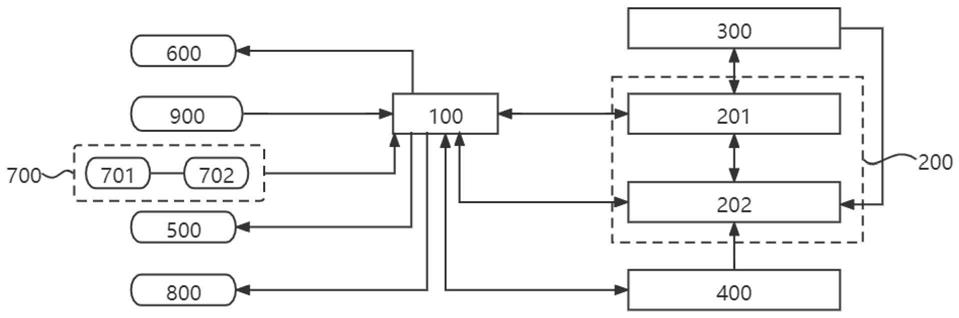
53.图21为本技术实施例提供的一种车辆的结构示意图。
具体实施方式
54.通常,雷达系统可以通过mimo虚拟阵列的方式增大虚拟孔径,以提升角度分辨率。
55.具体地,本技术实施例中,mimo雷达系统可以包括天线阵列、微波集成电路(monolithic microwave integrated circuit,mmic)和处理单元。天线阵列可以包括多个发射天线和多个接收天线,如图3所示。
56.其中,微波集成电路用于产生雷达信号,进而通过天线阵列将雷达信号发出。雷达信号发出后,经目标反射后形成回波信号,回波信号被接收天线接收。微波集成电路还用于对天线阵列接收到的回波信号进行变换和采样等处理,并将处理后的回波信号传输至处理单元。
57.其中,处理单元用于对回波信号进行快速傅里叶变换(fast fourier transformation,fft)、信号处理等操作,从而根据接收到的回波信号确定目标的距离、速度、方位角等信息。具体地,该处理单元可以是微处理器(microcontroller unit,mcu)、中央处理器(central process unit,cpu)、数字信号处理器(digital signal processor,dsp)、现场可编程门阵列(field-programmable gate array,fpga)等具有处理功能的器件。
58.其中,天线阵列中包括多个发射天线和多个接收天线。发射天线用于发射雷达信号,接收天线用于接收雷达信号经目标反射后形成的回波信号。天线阵列包括多个发射天线和多个接收天线,即包括多个发射通道和多个接收通道,因而天线阵列可以虚拟成包括多个虚拟收发通道的虚拟阵列,处理单元将接收到的回波信号折算成虚拟阵列的观测结果,即可根据虚拟阵列的观测结果进行处理和解算,获取目标的距离、速度、方位角等信息。
59.需要说明的是,本技术实施例中所述的雷达系统可以应用于多种领域,示例性地,本技术实施例中的雷达系统包括但不限于车载雷达、路边交通雷达,无人机雷达。
60.现有技术中,通常通过图1所示的雷达天线阵列方案形成图2所示的虚拟天线阵列(virtual antenna array)。图2所示的虚拟天线阵列为一个144*16的均匀二维阵,水平方向的虚拟通道数为24*6=144,垂直方向的虚拟通道数为8*2=16。
61.由于图2所示的虚拟天线阵列为均匀的平面阵列,其水平方向和垂直方向的角度
匹配简单,因而为了在水平方向和垂直方向达到较高的分辨率,需要设置较多的发射阵元和接收阵元,从而增加水平方向和垂直方向的虚拟通道数,提高水平方位角和垂直方位角的计算精度。
62.但是,在发射天线和接收天线数目较多的情况下,天线阵列的设计和加工难度会增加(例如,由于发射天线间隔小,因而需要通过打孔实现对天线的馈电,对设计和加工要求较高),此外,天线阵列还会占用芯片上较大的空间,因此图1所示的天线阵列方案虽然可以在一定程度上提升角度分辨率,但是设计和加工难度大,成本也较高。
63.本技术实施例提供一种雷达系统及车辆,用以在获得较高角度分辨率的前提下,减少发射阵元和接收阵元的数量,从而达到减少设计和加工难度。
64.另外由于发射阵元连接芯片中发射通道,接收阵元连接芯片中接收通道,减少发射阵元或接收阵元的数量即对应减少芯片中发射通道和接收通道的数量,并且减少对应收发通道数的存储和处理,因而采用本技术提供方案也可以达到降低芯片面积、芯片成本和芯片功耗的目标,从而降低雷达模组的体积、成本和功耗。
65.需要说明的是,本技术实施例中,多个,是指两个或两个以上。另外,需要理解的是,在本技术的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。本技术中所提到的“耦合”,是指电学连接,具体可以包括直接连接或者间接连接两种方式。下面,对本技术实施例的应用场景加以简单介绍。
66.下面将结合附图对本技术实施例作进一步地详细描述。
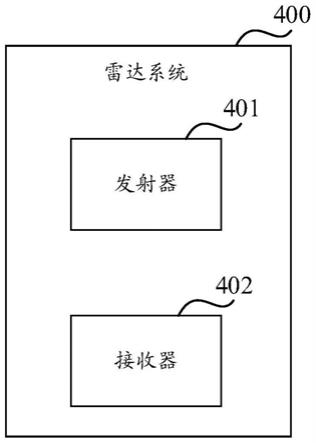
67.参见图4,本技术实施例提供的雷达系统400包括发射器401和接收器402。
68.发射器401,用于发射雷达信号。
69.接收器402,用于接收雷达信号经目标反射后的回波信号。
70.其中,该回波信号可以用于确定目标的水平方位角和垂直方位角。雷达信号可以为调频连续波(frequency modulated continuous wave,fmcw)、多频移键控(multiple frequency-shift keying,mfsk)、调相连续波(phase modulated continuous wave,pmcw)中的任一种。当然,雷达信号也可以采用其他汽车毫米波雷达所使用的波形,本技术对此不做限定。
71.其中,发射器401中的发射天线阵列和接收器402中的接收天线阵列用于形成虚拟线性阵列(也可以称为“一维线阵”)和虚拟平面阵列(也可以称为“二维面阵”),虚拟线性阵列中包括在第一方向上的均匀线阵,虚拟平面阵列中包括均匀面阵;均匀线阵中相邻两个阵元(即虚拟通道)之间的第一间距d1小于均匀面阵中在第一方向上相邻的两个阵元(即虚拟通道)之间的第二间距d2。
72.具体地,第一方向可以为水平方向,也可以为垂直方向。若第一方向为水平方向,则虚拟线性阵列用于确定目标的水平方位角测量值,虚拟平面阵列用于确定目标的垂直方位角测量值和水平方位角测量值;若第一方向为垂直方向,则虚拟线性阵列用于确定目标的垂直方位角测量值,虚拟平面阵列用于确定目标的垂直方位角测量值和水平方位角测量值。在本技术的附图及示例中,以第一方向为水平方向为例进行示意。
73.需要说明的是,本技术实施例中所述的水平方向和垂直方向,与发射天线阵列和接收天线阵列所形成的虚拟天线阵列(虚拟线性阵列和虚拟平面阵列)的位置相关。以第一
方向为水平方向为例,那么水平方向可以理解为虚拟线性阵列中阵元依次排布的方向,垂直方向可以理解为虚拟天线阵列所在的平面内、与水平方向垂直的方向。示例性地,本技术实施例中,水平方向和垂直方向均是相对于配备雷达系统400的车辆所行驶的地面而言的。
74.此外,本技术实施例中,对均匀线阵和均匀面阵可以由如下理解:均匀线阵包括在第一方向上单排排列的多个阵元,且每两个相邻的阵元之间的间距相等。均匀面阵可以视为由多个均匀线阵沿着与第一方向垂直的第二方向排列后组成,每个均匀线阵包括第一方向单排排列的多个阵元。在均匀面阵中,在第一方向上相邻的两个阵元间的间距相等,在第二方向上相邻的两个阵元间的间距相等。比如,均匀面阵由p*q个阵元组成,即该均匀面阵由q个均匀线阵沿着第二方向等间距排列后组成,每个均匀线阵包括在第一方向上单排排列的p个阵元。在每个均匀线阵中,相邻的两个阵元间的间距相等。
75.示例性地,虚拟线性阵列和虚拟平面阵列的一种可能的分布形式可如图5所示。以第一方向为水平方向为例,从图5可以看出,虚拟线性阵列中包括一个沿水平方向单排排布的均匀线阵,该均匀线阵包括40个阵元;虚拟平面阵列包括两个均匀面阵,每个均匀面阵包括16*4个阵元。在水平方向上,均匀线阵中两个阵元之间的第一间距大于均匀面阵中两个阵元之间的第二间距。
76.与现有技术不同的是,本技术实施例中,通过发射器401中的发射天线阵列和接收器402中的接收天线阵列可以虚拟出一个虚拟线性阵列和一个虚拟平面阵列。虚拟线性阵列中包括第一方向上的均匀线阵,虚拟平面阵列中包括均匀面阵。其中,虚拟线性阵列中包括的均匀线阵的数量可以为一个或多个,虚拟平面阵列中包括的均匀面阵的数量也可以为一个或多个。
77.其中,虚拟线性阵列中包括在第一方向上的均匀线阵,其具体含义可以是:虚拟线性阵列中包括一个或多个第一方向上的均匀线阵。若包括多个第一方向上的均匀线阵,本技术中仅限定可以通过插值的方式在虚拟线性阵列中找到均匀线阵,并不限定虚拟线性阵列为均匀的线性阵列。
78.同样地,虚拟平面阵列中包括均匀面阵,其具体含义可以是:虚拟平面阵列中包括一个或多个均匀面阵。若包括多个均匀面阵,本技术中仅限定可以通过插值的方式在虚拟平面阵列中找到均匀面阵,并不限定虚拟平面阵列为均匀的平面阵列。
79.特别地,均匀线阵的排布比均匀面阵的排布密集。采用这种方式,由于密集的均匀线阵可以保证在第一方向上较大的视场角(field of view,fov),因而可以使得通过均匀线阵对第一方向对应的方位角(例如水平方位角)进行解算(即根据虚拟天线阵列中每个阵元的观测结果计算目标的方位角)时的解算结果更为准确。同时,由于均匀线阵可以满足第一方向上的fov要求,因此均匀面阵中阵元间在第一方向上的间距可以设置得较大(fov较小,那么在均匀线阵的fov范围内多个角度方向可能会混叠),配合均匀线阵的fov获得第一方向上的正确角度信息。也就是说,对应均匀面阵而设置的天线阵列中可以仅包括数量较少的阵元,从而到达减少发射阵元和接收阵元的数量。当均匀线阵和均匀面阵在第一方向上的口径相同时,均匀线阵和均匀阵在第一方向上获得的角度分辨率相同。当均匀线阵在第一方向上的口径大于均匀面阵在第一方向上的口径,均匀线阵在第一方向上获得的角度分辨率更高,可以把在均匀线阵中获得的更高的第一方向的角度信息代入均匀面阵中,解算第二方向(例如可以是垂直方向)上的角度信息。因而采用本技术的方案,与现有技术相
比,可以在第一方向上获得相同的角度分辨率,但是需要的阵元数更少。
80.在一种可能的示例中,若第一间距为d1、第二间距为d2,则d1和d2可以满足如下关系:m*d1=n*d2;其中,m和n均为正整数,m>n。
81.以第一方向为水平方向为例,通过发射器401和接收器402虚拟出的虚拟线性阵列,可以确定目标的水平方位角测量值,通过发射器401和接收器402虚拟出的虚拟平面阵列,可以确定目标的水平方位角测量值和垂直方位角测量值。在实际应用中,当均匀线阵或均匀面阵中水平方向的阵元的间隔属于某一范围时,则利用虚拟线性阵列确定的水平方位角可能会存在角度模糊的情况(即在雷达系统视场角范围内,一个目标出现多个测量值)。因此,通过虚拟线性阵列和虚拟平面阵列分别获取目标的水平方位角的测量值之后,可以利用中国余数定理确定目标的真实水平方位角。
82.下面对模糊的情况进行一些说明:通常,定义不模糊的fov为fov=2*arcsin(λ/2d),d为阵元间间隔。不难看出,d越大,不模糊的fov越小。假设均匀线阵的fov为fov1,均匀面阵在第一方向上的fov为fov2。由于d1《d2,那么fov2《fov1。那么对于在fov1内的目标对应的角度θ1,在均匀面阵的第一方向上测量时,仅能获得fov2内的角度θ2。目标在第一方向上的真实角度θ=k1*fov1 θ1=k2*fov2 θ2,其中k1和k2分别对应系统设计fov内fov1和fov2的混叠系数。fov1混叠的情况下,k1取不同值时对应θ可以取到不同值,θ取到的不同值可以视为一个目标的多个测量值;fov1不混叠的情况k1取0。同样地,根据均匀面阵解算得到的θ2也存在模糊的情况,k2取不同值时对应θ可以取到不同值,θ取到的不同值可以视为一个目标的多个测量值。
83.具体地,第一间距可以小于或等于雷达信号的载波波长的一半。若第一间距小于或等于雷达信号的载波波长的一半,则利用虚拟线性阵列确定目标的水平方位角测量值时不会出现角度模糊的情况,因而在确定目标的水平方位角时的解算方式更为简便。当然,第一间距也可以大于雷达信号的载波波长的一半,此时利用虚拟线性阵列确定目标的水平方位角测量值时会出现角度模糊的情况,因而在确定目标的真实水平方位角时还需利用前述中国余数定理确定。
84.采用本技术实施例的方案,可以通过发射器401中的发射天线阵列和接收器402中的接收天线阵列虚拟出一个虚拟线性阵列和一个虚拟平面阵列,其中仅虚拟线性阵列中的阵元较密集,虚拟平面阵列中的阵元相对稀疏,因而可以通过较少的发射天线和较少的接收天线实现上述虚拟线性阵列和虚拟平面阵列。由于虚拟线性阵列和虚拟平面阵列在第一方向上的阵元密度不同(第一间距小于第二间距),因而通过虚拟线性阵列和虚拟平面阵列分别计算第一方向对应的方位角时可以获得不同fov:虚拟线性阵列在第一方向的fov比虚拟平面阵列在第一方向的fov更大,通过虚拟线性阵列计算得到的第一方向的方位角的结果更为准确。因此,通过虚拟线性阵列和虚拟平面阵列这两个阵列的观测结果确定目标的方位角时,可以实现不同fov的匹配。
85.不难看出,虚拟线性阵列和虚拟平面阵列所形成的虚拟天线阵列的匹配度比图2示出的虚拟天线阵列的匹配度复杂,因此,本技术实施例中,不必将发射器401中的发射天线和接收器402中的接收天线的数量设置得过多,即可通过两个虚拟阵列的解算获取较高的角度分别率:通过在第一方向上阵元分布密集的虚拟线性阵列计算第一方向对应的方位角,再将计算得到的第一方向的角度信息代入虚拟平面阵列的响应矩阵中,计算与第一方
向垂直的第二方向(例如可以是垂直方向)对应的角度信息,从而实现第一方向和第二方向的方位角的高分辨率解算。也就是说,采用本技术实施例的方案,可以通过较少的发射天线和较少的接收天线实现目标的垂直方位角和水平方位角的解算,从而降低天线阵列的设计和加工难度,同时减少雷达系统的成本。
86.本技术实施例中,发射器401中的发射天线阵列和接收器402中的接收天线阵列形成一个虚拟线性阵列和一个虚拟平面阵列。具体地,发射天线阵列可以包括垂直发射天线阵列和水平发射天线阵列;其中,水平发射天线阵列和接收天线阵列形成虚拟线性阵列,垂直发射天线阵列和接收天线阵列形成虚拟平面阵列。
87.具体地,实际应用中,在发射天线阵列和接收天线阵列的位置已经确定的情况下,虚拟天线阵列的位置是可以唯一确定的:假设pm是ntx个发射天线中天线m(m=0,1,
…
,ntx-1)的坐标,qn是nrx个接收天线中天线n,(n=0,1,
…
,nrx-1)的坐标位置,那么形成的虚拟天线阵列中阵元的位置可以由pm qn唯一确定,在m遍历ntx个发射天线、n遍历nrx个接收天线后即可确定虚拟天线阵列的位置。
88.具体应用到本技术实施例中,通过遍历水平发射天线阵列中的发射天线和接收天线阵列中的接收天线,可以唯一确定虚拟线性阵列的位置;通过遍历垂直发射天线阵列中的发射天线和接收天线阵列中的接收天线,可以唯一确定虚拟平面阵列的位置。因此,本技术实施例中对虚拟线性阵列以及虚拟平面阵列的位置限定,也可以视为是对真实的发射天线阵列和接收天线阵列的位置限定。
89.需要说明的是,发射器401可以是由发射天线阵列和发射通道构成的装置,接收器402可以是由接收天线阵列和接收通道构成的装置。其中,发射天线阵列和接收天线阵列可以位于印刷电路板(print circuit board,pcb)上,发射通道和接收通道可以位于芯片内,即aob(antenna on pcb);或者,发射天线阵列和接收天线阵列可以位于芯片封装内,发射通道和接收通道可以位于芯片内,即aip(antenna in package)。本技术实施例中对于组合形式不做具体限定。
90.应理解,本技术实施例中对发射器401和接收器402的改进主要体现在发射天线阵列和接收天线阵列的排布方式,因此在后面的描述中不再对发射通道和接收通道进行详细介绍。
91.实际实现时,由于芯片的管脚和颗粒不同,发射天线阵列和接收天线阵列可以有不同的实现方式,下面列举其中的两种,其他方式不一一枚举。
92.第一种
93.在第一种实现方式中,接收天线阵列包括沿水平方向单排排布的k个接收阵元;垂直发射天线阵列包括分别位于接收天线阵列两侧的第一发射天线阵列和第二发射天线阵列,第一发射天线阵列和第二发射天线阵列均包括沿垂直方向单排排布的m个发射阵元;水平发射天线阵列包括分别与第一发射天线阵列和第二发射天线阵列邻接的第三发射天线阵列和第四发射天线阵列,第三发射天线阵列和第四发射天线阵列均包括沿水平方向单排排布的n个发射阵元。
94.不难看出,在第一种实现方式中,第三发射天线阵列、第四发射天线阵列以及接收天线阵列形成虚拟线性阵列。由于第三发射天线阵列和第四发射天线阵列均包括沿水平方向单排排布的n个发射阵元,接收天线阵列包括沿水平方向单排排布的k个接收阵元,因此
虚拟线性阵列包括2*n*k个沿水平方向单排排布的虚拟通道。
95.第一发射天线阵列、第二发射天线阵列以及接收天线阵列形成虚拟平面阵列。由于第一发射天线阵列和第二发射天线阵列均包括沿垂直方向单排排布的m个发射阵元,接收天线阵列包括沿水平方向单排排布的k个接收阵元,因此虚拟平面阵列包括2*m*k个虚拟通道,其中水平方向的虚拟通道数为2*k,垂直方向的虚拟通道数为m。
96.示例性地,发射天线阵列和接收天线阵列的分布方式可以如图6所示。在图6的示例中,以k=32、m=8、n=4为例进行示意,实际应用中,k、m和n的数值不限定为图6中示意的情况。其中,第一发射天线阵列和第二发射天线阵列中发射阵元间的间距为3λ(λ为雷达信号的载波波长),第三发射天线阵列和第四发射天线阵列中发射阵元间的间距为1.5λ,接收天线阵列中接收阵元间的间距为2λ。
97.值得注意的是,由于第一发射天线阵列和第二发射天线阵列中的发射阵元需要与接收天线阵列中的接收阵元形成虚拟通道,因而第一发射天线阵列和第二发射天线阵列通常分布在接收天线阵列的外侧,从而使得每个发射阵元均可以与任一接收阵元形成虚拟通道,避免遮挡。
98.图6所示的发射天线阵列和接收天线阵列形成的虚拟线性阵列和虚拟平面阵列可以如图7所示。在图7中,虚拟线性阵列包括2*4*32=256个虚拟通道,虚拟平面阵列中水平方向的虚拟通道数为2*32=64,垂直方向的虚拟通道数为8个。
99.不难看出,在图7的示例中,虚拟线性阵列和虚拟平面阵列在水平方向的孔径大小相同。虚拟线性阵列中包括一个均匀线阵,虚拟平面阵列中包括两个均匀面阵。其中,均匀线阵的排布比均匀面阵的排布密集。
100.第二种
101.在第二种实现方式中,接收天线阵列包括沿水平方向单排排布的k个接收阵元;垂直发射天线阵列位于接收阵列的一侧,垂直发射天线阵列包括沿垂直方向单排排布的m个发射阵元;水平发射天线阵列与垂直发射天线阵列邻接,水平发射天线阵列包括沿水平方向单排排布的n个发射阵元。
102.不难看出,在第二种实现方式中,水平发射天线阵列与接收天线阵列形成虚拟线性阵列。由于水平发射天线阵列包括沿水平方向单排排布的n个发射阵元,接收天线阵列包括沿水平方向单排排布的k个接收阵元,因此虚拟线性阵列包括n*k个沿水平方向单排排布的虚拟通道。
103.垂直发射天线阵列与接收天线阵列形成虚拟平面阵列。由于垂直发射天线阵列包括沿垂直方向单排排布的m个发射阵元,接收天线阵列包括沿水平方向单排排布的k个接收阵元,因此虚拟平面阵列包括m*k个虚拟通道,其中水平方向的虚拟通道数为k,垂直方向的虚拟通道数为m。
104.示例性地,发射天线阵列和接收天线阵列的分布方式可以如图8所示。在图8的示例中,以k=32、m=8、n=3为例进行示意,实际应用中,k、m和n的数值不限定为图8中示意的情况。其中,水平发射天线阵列中发射阵元间的间距为1λ(λ为雷达信号的载波波长),垂直发射天线阵列中发射阵元间的间距为3λ,接收天线阵列中接收阵元间的间距为1.5λ。
105.值得注意的是,由于垂直发射天线阵列中的发射阵元需要与接收天线阵列中的接收阵元形成虚拟通道,因而垂直发射天线阵列通常分布在接收天线阵列的外侧,从而使得
每个发射阵元均可以与任一接收阵元形成虚拟通道,避免遮挡。
106.图8所示的发射天线阵列和接收天线阵列形成的虚拟线性阵列和虚拟平面阵列可以如图9所示。在图9中,虚拟线性阵列包括3*32=96个虚拟通道,虚拟平面阵列中水平方向的虚拟通道数为32,垂直方向的虚拟通道数为8个。
107.不难看出,在图9中,虚拟线性阵列和虚拟平面阵列在水平方向的孔径大小相同。虚拟线性阵列中包括一个均匀线阵,虚拟平面阵列中包括一个均匀面阵。其中,均匀线阵的排布比均匀面阵的排布密集。
108.需要说明的是,本技术实施例中,以上两种实现方式仅为示例,发射天线阵列和接收天线阵列的排布方式并不限定为图6或图8所示的方式。
109.示例性地,在图6的示例中,第一发射天线阵列和第二发射天线阵列均可以由两列或三列沿垂直方向单排排布的8个发射阵元组成;或者,第一发射天线阵列和第二发射天线阵列均可以由四列沿垂直方向单排排布的8个发射阵元组成,其中,发射阵元在水平方向的间距小于1.5λ。
110.示例性地,在图8的示例中,接收天线阵列可以由两行沿水平方向单排排布的32个接收阵元组成。
111.此外,雷达系统400还可以包括处理单元403,用于根据回波信号确定目标的水平方位角和垂直方位角,如图10所示。
112.处理单元403可以视为图3中的处理单元,也可以视为图3中处理单元和微波集成电路的集合,处理单元403与发射器401和接收器402耦合。
113.具体地,处理单元403可以通过如下方式确定目标的水平方位角和垂直方位角:根据回波信号分别确定虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果;根据虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果确定目标的水平方位角和垂直方位角。
114.接收天线阵列接收到回波信号后,处理单元403根据接收天线阵列中每个接收天线接收到的信号,可以解算出虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果。
115.得到虚拟线性阵列对雷达信号的观测结果以及虚拟平面阵列对雷达信号的观测结果之后,处理单元403的处理过程可以分为三个步骤:步骤一,根据虚拟线性阵列对雷达信号的观测结果确定目标的第一候选水平方位角;步骤二,根据虚拟平面阵列对雷达信号的观测结果确定目标的第二候选水平方位角以及候选垂直方位角;步骤三,根据第一候选水平方位角、第二候选水平方位角以及候选垂直方位角确定目标的水平方位角和垂直方位角。下面,对这三个步骤进行详细介绍。
116.步骤一
117.虚拟线性阵列对于水平方位角在θ处的目标的相位响应矢量为an(θ):
118.an(θ)=[1exp(-j*2πd
1 sinθ/λ)...exp(-j*2π(n-1)d
1 sinθ/λ)]
[0119]
假设目标信号为s(t),则该虚拟线性阵列得到的观测结果xn(t)为:
[0120]
xn(t)=an(θ)s(t) u(t)
[0121]
其中,u(t)为噪声,n∈[1,2,3,...,n]是虚拟线性阵列中每个虚拟通道的序号,n是虚拟线阵包括的虚拟通道的数量,θ为目标的第一候选水平方位角,d1为均匀线阵中相邻
两个虚拟通道之间的第一间距,λ为雷达信号的载波波长。处理单元403确定虚拟线性阵列对雷达信号的观测结果后,可以使用数字波束合成(digital beam forming,dbf)或快速傅里叶变换(fast fourier transform,fft)等常见的角度估计算法获得目标的第一候选水平方位角θ1。具体步骤可以参照现有技术中的描述,此处不再赘述。
[0122]
需要注意的是,如前所述,利用虚拟线性阵列确定目标的水平方位角测量值可能会出现角度模糊的情况,即第一候选水平方位角可能包括多个方位角,其中仅有部分水平方位角是目标的真实水平方位角。
[0123]
在步骤一中,如果d1=λ/2,则此时不存在角度模糊的情况,在系统fov范围内一个目标只出现一个测量值,即根据上述公式确定的第一候选水平方位角θ1即为目标的真实水平方位角;如果d1>λ/2,则可能存在角度模糊的情况,在系统fov范围内一个目标可能出现多个测量值,即根据上述公式确定的第一候选水平方位角θ1中可能包括多个测量值,其中的部分测量值为目标的真实水平方位角,此时目标的真实水平方位角还需结合虚拟平面阵列的观测结果确定。
[0124]
示例地,如图11所示,为根据虚拟线性阵列得到的第一候选水平方位角。若不存在角度模糊的情况,则确定的第一候选水平方位角可以是图11中的θ1,此时θ1即为目标的真实水平方位角;若存在角度模糊的情况,则确定的第一候选水平方位角可以是图11中的θ
1,1
、θ
1,2
、θ
1,3
和θ
1,4
,其中的部分水平方位角是目标的真实水平方位角。
[0125]
步骤二
[0126]
虚拟平面阵列对垂直方位角为的目标的相位响应矢量为:
[0127][0128]
其中,m为虚拟平面阵列中沿垂直方向的虚拟通道数,d3为垂直方向上虚拟通道间的间距,λ为雷达信号的载波波长。
[0129]
如果虚拟平面阵列在水平方向的虚拟通道数为k,可以得到该虚拟平面阵列对目标的相位响应矩阵为:
[0130][0131]
其中,ak(θ)=[1exp(-j*2πd
2 sinθ/λ)...exp(-j*2π(k-1)d
2 sinθ/λ)]。则该虚拟平面阵列对于水平方位角为θ,垂直方位角为的目标的测量结果x(t)为:
[0132]
x(t)=as(t) w(t)
[0133]
处理单元403确定虚拟平面阵列对雷达信号的观测结果后,可以使用二维dbf或二维fft等常见的角度估计算法获得目标的第二候选水平方位角θ2和候选垂直方位角具体步骤可以参照现有技术中的描述,此处不再赘述。应理解,由于虚拟平面阵列中水平方向上虚拟通道间的间隔比较大,仅靠虚拟平面阵列得到的第二候选水平方位角θ2是存在模糊的。
[0134]
步骤三
[0135]
结合步骤一中得到的第一候选水平方位角以及步骤二中得到的第二候选水平方位角、候选垂直方位角,可以获取目标的二维角度信息
[0136]
情况一
[0137]
如果通过虚拟线性阵列测量得到的第一候选水平方位角θ1无模糊,将θ1代入虚拟
平面阵列的响应矩阵中可以直接求得目标的二维角度信息
[0138]
情况二
[0139]
如果通过线阵测量得到的第一候选水平方位角θ1存在模糊,则需要联合第一候选水平方位角θ1和第二候选水平方位角θ2,利用中国余数定理确定目标的真实水平方位角θ。然后,再将θ代入虚拟平面阵列的响应矩阵中求得目标的二维角度信息
[0140]
示例性地,如图12所示,通过虚拟线性阵列确定的第一候选水平方位角可以为θ
1,1
、θ
1,2
、θ
1,3
和θ
1,4
,通过虚拟平面阵列确定的第二候选水平方位角可以为θ
2,1
、θ
2,2
、θ
2,3
、θ
2,4
和θ
2,5
,其中θ
1,2
和θ
2,2
重合,那么利用中国余数定理确定的目标的真实水平方位角θ即为θ
1,2
(也就是θ
2,2
)。将θ代入虚拟平面阵列的响应矩阵中求得即可获得目标的二维角度信息
[0141]
需要说明的是,上述步骤一和步骤二的执行顺序可以交换,或者可以并行处理。步骤三需要在步骤一和步骤二执行完成后执行。此外,以上对水平方位角和垂直方位角的求解步骤可以独立执行,也可以在求解目标的距离和速度时,在rd-map(距离速度图)上找出的目标可能存在的rd-cell(距离速度单元)上进行。在rd-cell上求解时,若存在多个目标,则多目标在角度上因为混叠而重合的概率会降低,因而在rd-map后进行水平方位角和垂直方位角的解算的效果更好。
[0142]
若雷达系统400周围存在多个目标,其中两个目标的方位角发生混叠而无法区分时,可以利用雷达散射面积(radar-cross section,rcs)或其他信息进行匹配。
[0143]
具体地,若通过上述虚拟线性阵列和虚拟平面阵列的解算,得到的目标的水平方位角包括第一水平方位角和第二水平方位角,目标的垂直方位角包括第一垂直方位角和第二垂直方位角。那么,处理单元403还用于:确定第一水平方位角对应的rcs大于第二水平方位角对应的rcs;确定第一垂直方位角对应的rcs大于第二垂直方位角对应的rcs;确定第一水平方位角和第一垂直方位角为目标中的第一子目标的位置,第二水平方位角和第二垂直方位角为目标中的第二子目标的位置。
[0144]
其中,第一子目标和第二子目标为雷达系统周围存在的两个目标。
[0145]
也就是说,若解算得到两个水平方位角以及两个垂直方位角(即存在两个目标),则对应rcs较大的水平方位角和垂直方位角为一组,代表其中一个目标的二维角度信息;对应rcs较小的水平方位角和垂直方位角为一组,代表另一个目标的二维角度信息。当然,若目标的数量为两个以上,也可以采用类似的方式进行匹配。或者,也可以采用除rcs之外的其他参数进行匹配,本技术实施例中对此不作具体限定。
[0146]
示例性地,假设雷达系统周围存在两个目标,雷达系统的天线阵列采用图6所示的排布方式,则根据虚拟线性阵列得到的第一候选水平方位角(即目标的水平方位角估计结果)以及根据虚拟平面阵列得到的第二候选水平方位角(即目标的水平方位角估计结果)可以如图13所示。从图13中可以看出,在水平方位角为3
°
和4
°
的位置各存在一个目标,分别称之为a和b。
[0147]
由于虚拟线性阵列和虚拟平面阵列在水平方向的孔径是一样大的,因而二者的水平角度分辨率是一致的。所以,将虚拟线性阵列得到的第一候选水平方位角代入到虚拟平面阵列的响应矩阵中进行垂直角度估计即可得到每个目标各自对应的水平方位角和垂直
方位角。如图14所示,利用虚拟平面阵列的响应进行二维角度求解时,a和b两个目标会各自出现4个明显的峰值(与图13中虚拟平面阵列的谱线出现四个明显峰值相对应)。结合虚拟线性阵列的响应可以完成目标的二维角度估计,如图15所示。
[0148]
此外,当两个目标在水平方向上的角度差恰好等于虚拟平面阵列在水平方向的重复间隔时(如图16中两个目标的水平方位角分别为-26.6
°
和3
°
),此时如果将虚拟线性阵列计算得到的这两个角度代入虚拟平面阵列的响应矩阵中进行垂直方位角估计,在垂直方向上会得到两个角度(如图17所示,在2
°
和6
°
处出现谱峰),此时水平方位角和垂直方位角的对应关系无法进行区分。
[0149]
在这种情况下,可以利用目标的rcs进行水平方位角和垂直方位角的匹配,如目标信息为3
°
的目标rcs比-26.6
°
的目标rcs高,目标信息为2
°
的目标rcs比6
°
的目标rcs高,则水平方位角为3
°
的目标a对应的垂直方位角为2
°
,水平方位角为-26.6
°°
的目标b对应的垂直方位角为6
°
,如图18所示。
[0150]
示例性地,假设雷达系统周围存在两个目标a和b,雷达系统的天线阵列采用图8所示的排布方式,则根据虚拟线性阵列得到的第一候选水平方位角(即目标的水平方位角估计结果)以及根据虚拟平面阵列得到的第二候选水平方位角(即目标的水平方位角估计结果)可以如图19所示。
[0151]
由于虚拟线性阵列和虚拟平面阵列在水平方向的孔径是一样大的,因而二者的水平角度分辨率是一致的。所以,将虚拟线性阵列得到的第一候选水平方位角代入到虚拟平面阵列响应矩阵中进行垂直角度估计即可得到每个目标各自对应的水平方位角和垂直方位角。结合虚拟线性阵列的响应合虚拟平面阵列的响应可以完成目标的二维角度估计,如图20所示。
[0152]
综上,采用本技术实施例提供的雷达系统400,可以通过发射器401中的发射天线阵列和接收器402中的接收天线阵列虚拟出一个虚拟线性阵列和一个虚拟平面阵列,由于两个虚拟阵列的匹配度比现有技术中的虚拟天线阵列的匹配度复杂,因而可以通过在发射器401和接收器402中设置较少数量的天线实现本技术中的虚拟线性阵列和虚拟平面阵列。此外,由于虚拟线性阵列和虚拟平面阵列的匹配度复杂,因而通过对两个阵列的解算可以获得较高的角度分别率。也就是说,采用本技术实施例提供的方案,可以通过较少的发射天线和接收天线实现目标的垂直方位角和水平方位角的高分辨率的解算,从而在提高雷达系统的角度分辨率的情况下,降低天线阵列的设计和加工难度,同时减少雷达系统的成本。
[0153]
基于同一发明构思,本技术实施例还提供一种车辆。如图21所示,该车辆包括雷达系统400以及电子控制单元(electronic control unit,ecu)2101。其中,雷达系统400用于:发射雷达信号;接收雷达信号经目标反射后的回波信号;根据回波信号确定目标的水平方位角和垂直方位角;ecu2101用于:根据目标的水平方位角和垂直方位角确定该车辆的行使路线。
[0154]
显然,本领域的技术人员可以对本技术实施例进行各种改动和变型而不脱离本技术实施例的范围。这样,倘若本技术实施例的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。