技术特征:
1.一种天线,其特征在于,包括:发射天线阵列,用于发射雷达信号;接收天线阵列,用于接收所述雷达信号经目标反射后的回波信号;所述发射天线阵列包括第一发射天线阵列和第三发射天线阵列,所述第一发射天线阵列位于所述接收天线阵列的第一侧,所述第三发射天线阵列与所述第一发射天线阵列邻接;所述第一发射天线阵列包括沿第二方向排列的多个阵元,所述第三发射天线阵列包括沿所述第一方向排列的多个阵元,且所述第三发射天线阵列在所述第一方向上的阵元数量大于所述第一发射天线阵列在所述第一方向的阵元数量,其中,所述第二方向与所述第一方向垂直。2.如权利要求1所述的天线,其特征在于,所述第一发射天线阵列包括的沿所述第二方向排列的所述多个阵元包括单排排布的阵元。3.如权利要求1或2所述的天线,其特征在于,所述第三发射天线阵列包括的沿所述第一方向排列的所述多个阵元包括单排排布的阵元。4.如权利要求1至3任一所述的天线,其特征在于,所述发射天线阵列还包括第二发射天线阵列,所述第二发射天线阵列位于所述接收天线阵列的第二侧,所述第二发射天线阵列包括沿所述第二方向排列的多个阵元。5.如权利要求1至4任一所述的天线,其特征在于,所述发射天线阵列还包括第四发射天线阵列,所述第四发射天线阵列与所述第二天线阵列邻接,所述第四发射天线阵列包括沿所述第一方向排列的多个阵元。6.如权利要求5所述的天线,其特征在于,所述第四发射天线阵列在所述第一方向上的阵元数量大于所述第二发射天线阵列沿所述第一方向的阵元数量。7.如权利要求4至6任一所述的天线,其特征在于,所述第二发射天线阵列包括的沿所述第二方向排列的所述多个阵元包括单排排布的阵元。8.如权利要求4至7任一所述的天线,其特征在于,所述第四发射天线阵列包括的沿所述第一方向排列的所述多个阵元包括单排排布的阵元。9.如权利要求4至8任一所述的天线,其特征在于,所述接收天线阵列的第一侧,和/或所述接收天线阵列的第二侧为所述接收天线阵列的外侧。10.如权利要求1至9任一所述的天线,其特征在于,所述第一发射天线阵列、所述第二发射天线阵列和所述接收天线阵列形成所述虚拟平面阵列;和/或所述第三发射天线阵列、所述第四发射天线阵列和所述接收天线阵列形成所述虚拟线性阵列。
11.如权利要求10所述的天线,其特征在于,所述虚拟线性阵列和所述虚拟平面阵列在所述第一方向上的孔径大小相同。12.如权利要求1至11任一所述的天线,其特征在于,所述第一方向为水平方向或垂直方向。13.如权利要求1至12任一所述的天线,其特征在于,所述接收天线阵列包括沿所述第一方向排列的多个阵元。14.一种雷达系统,其特征在于,包括:如权利要求1至13任一所述的天线,和处理单元,所述处理单元,用于根据所述回波信号确定所述目标的水平方位角和垂直方位角。15.如权利要求14所述的系统,其特征在于,所述处理单元具体用于:根据所述回波信号分别确定所述虚拟线性阵列对所述雷达信号的观测结果以及所述虚拟平面阵列对所述雷达信号的观测结果;根据所述虚拟线性阵列对所述雷达信号的观测结果以及所述虚拟平面阵列对所述雷达信号的观测结果确定所述目标的水平方位角和垂直方位角。16.如权利要求15所述的系统,其特征在于,所述处理单元具体用于:根据所述虚拟线性阵列对所述雷达信号的观测结果确定所述目标的第一候选水平方位角;根据所述虚拟平面阵列对所述雷达信号的观测结果确定所述目标的第二候选水平方位角以及候选垂直方位角;根据所述第一候选水平方位角、所述第二候选水平方位角以及所述候选垂直方位角确定所述目标的水平方位角和垂直方位角。17.如权利要求16所述的系统,其特征在于,所述处理单元在根据所述虚拟线性阵列对所述雷达信号的观测结果确定所述目标的第一候选水平方位角时,具体用于:根据所述虚拟线性阵列对所述雷达信号的观测结果,通过数字波束合成dbf或者快速傅里叶变换fft方式确定所述第一候选水平方位角。18.如权利要求16或17所述的系统,其特征在于,所述处理单元在根据所述虚拟平面阵列对所述雷达信号的观测结果确定所述目标的第二候选水平方位角以及候选垂直方位角时,具体用于:根据所述虚拟平面阵列对所述雷达信号的观测结果,通过dbf或者fft方式确定所述第二候选水平方位角和所述候选垂直方位角。19.如权利要求15所述的系统,其特征在于,所述目标的水平方位角包括第一水平方位角和第二水平方位角,所述目标的垂直方位角包括第一垂直方位角和第二垂直方位角;所述处理单元还用于:确定所述第一水平方位角对应的雷达散射截面积rcs大于所述第二水平方位角对应的rcs;确定所述第一垂直方位角对应的rcs大于所述第二垂直方位角对应的rcs;确定所述第一水平方位角和所述第一垂直方位角为所述目标中的第一子目标的位置,所述第二水平方位角和所述第二垂直方位角为所述目标中的第二子目标的位置。20.如权利要求14至19任一项所述的系统,其特征在于,所述雷达信号为调频连续波fmcw、多频移键控mfsk、调相连续波pmcw中的任一种。
21.一种车辆,其特征在于,包括如权利要求1~13任一项所述的天线,和/或,如权利要求14~20任一项所述的雷达系统。
技术总结
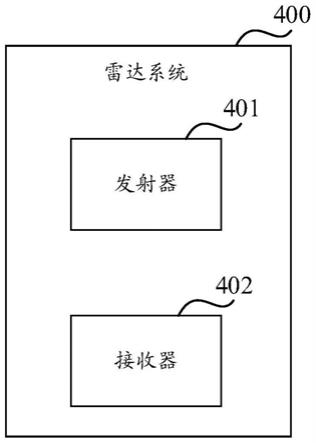
一种雷达系统(400)及车辆,用以在获得较高角度分辨率的前提下,减少发射天线和接收天线的数量,从而达到减少设计和加工难度。雷达系统(400)包括:发射器(401),用于发射雷达信号;接收器(402),用于接收雷达信号经目标反射后的回波信号;其中,发射器(401)中的发射天线阵列和接收器(402)中的接收天线阵列用于形成虚拟线性阵列和虚拟平面阵列,虚拟线性阵列中包括在第一方向上的均匀线阵,虚拟平面阵列中包括均匀面阵;均匀线阵中相邻两个阵元之间的第一间距小于均匀面阵中在第一方向上相邻的两个阵元之间的第二间距。两个阵元之间的第二间距。两个阵元之间的第二间距。
技术研发人员:劳大鹏 刘劲楠 王犇 周沐
受保护的技术使用者:华为技术有限公司
技术研发日:2019.07.22
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。