技术特征:
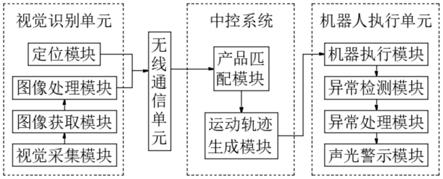
1.一种基于视觉识别的机器人分拣中控系统,包括视觉识别单元、无线通信单元、中控系统和机器人执行单元,其特征在于:所述视觉识别单元的输出端与无线通信单元的输入端电连接器,所述无线通信单元的输出端与中控系统的输入端电连接,所述中控系统的输出端与机器人执行单元的输入端电连接;所述视觉识别单元包括视觉采集模块、图像获取模块、图像处理模块和定位模块,所述视觉采集单元的输出端与图像获取模块的输入端电连接,所述图像获取模块的输出端与图像处理模块的输入端电连接,所述图像处理模块的输出端与无线通信单元的输入端电连接,所述定位模块的输出端与无线通信单元的输入端电连接;所述中控系统包括产品匹配模块和运动轨迹生成模块,所述无线通信单元的输出端与产品匹配模块的输入端电连接,所述产品匹配模块的输出端与运动轨迹生成模块的输入端电连接;所述机器人执行单元包括机器执行模块、异常检测模块、异常处理模块和声光警示模块,所述运动轨迹生成模块的输出端与机器执行模块的输入端电连接,所述机器执行模块的输出端与异常检测模块的输入端电连接,所述异常检测模块的输出端与异常处理模块的输入端电连接,所述异常处理模块的输出端与声光警示模块的输入端电连接。2.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述定位模块:用于对产品及机器人的坐标位置进行获取定位;所述无线通信单元:用于对数据的采集及数据信息传输发送;所述声光报警模块:用于在异常操作过程中发出强烈的声光报警信号,以达到提醒相关人员注意的目的。3.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述中控系统为plc可编程控制器,所述视觉采集模块为工业智能相机,图像分辨率为1600
×
1200。4.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述图像处理模块包括灰度处理和边缘特征提取:所述灰度处理用于对图像进行处理,处理过程为:对含有目标物体的图像进行灰度化处理,然后对可抓取区域进行阈值处理,最后使用fill-up算子做区域填充,并拟合其轮廓,从而得到目标物体,即产品,在阈值处理阶段,调用halcon软件中专用的阈值分割算子进行处理,格式为threshold,该算子将image图像中灰度值在15-20之间的区域输出;所述边缘特征提取用于对产品的边缘特征进行提取,提取方法为ro-berts算子、sobel算子、canny算子和laplacian算子其中的一种。5.根据权利要求4所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述图像获取模块:用于获取机器人的工作空间信息,所述工作空间信息包括产品的位置、产品的大小、障碍物的位置、障碍物的大小以及机器人的起始位置。6.根据权利要求5所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述运动轨迹生成模块的运动轨迹生产包括以下步骤:s1、假设机器人工作在二维空间,将该二维空间分为20*20个大小相同的栅格,使机器人能够在该空间中自由移动,在这些栅格中,如果没有障碍物,则称为自由栅格,如果具有障碍物,则称为障碍物栅格,并采用直角坐标法对每个栅格创建唯一标识;
s2、分别获取机器人和产品在栅格中的位置,将要规划的路径合成由n个点组成的点集,将机器人的起始位置所在的栅格作为起始点,将产品的位置所在的栅格作为目标点,除去起始点和目标点,具有n-2个栅格{(x
i
,y
i
)}(i=2,3,4,
…
,n-1);s3、将最短路径作为优化目标,得到:其中,n=20,且点(x
i
,y
i
)不包含障碍物栅格,将适应度函数设计为优化目标的倒数,得到适应度函数:s4、采用联赛选择机制,从群体中任意选择一定数目的个体,其中适应度最高的个体保存到下一代,反复执行,知道保存到下一代的个体数达到预先设定的数目为止,然后采用部分匹配交叉法依据均匀随机分布产生两个位串交叉点,定义这两个点之间的区域为一匹配区域;s5、使用位置交换操作交换两个副串的匹配区域,并采取随机在20个目标中选取两个点,将其对换位置,引进多次连续的单方向进化逆转操作,对于每一个目标体进行交叉变异,代入适应度函数进行评估,选择适应度最大的个体进行下一代的交叉、变异以及进化逆变操作,直到满足设定的最大遗传代数。7.根据权利要求6所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述采用直角坐标法对每个栅格创建唯一标识的方法为:将20*20的栅格在直角坐标系中进行放置,并以左下角的坐标(0,0)作为坐标原点,以水平向右为x轴的正方向,垂直向上为y轴的正方向,每一个单元格表示一个栅格,因此,栅格可以用坐标(x,y)来进行唯一标识。8.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述异常检测模块:用于获取机器人执行目标动作时的状态信息,根据所述状态信息,判断所述机器人执行所述目标动作是否存在异常,若存在异常,通过异常处理模块控制机器人执行所述目标动作匹配的保护动作,所述机器人执行目标动作时的状态信息包括:判断所述机器人驱动设备电流信息是否超过预设电流阈值,若超过,则确定所述机器人执行所述目标动作存在异常,若未超过,则确定所述机器人执行所述目标动作不存在异常。9.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述产品匹配模块:用于对目标产品进行识别,具体匹配算法如下:目标图像上的每个点以模板图像相同尺寸进行搜索,以像素点(u,v)为中心的搜索区域中的每一个像素点在x和y方向上的梯度为像素点(u,v)处的相似度测度计算公式如下:模板图像与目标搜索区域完全匹配则返回1,完全不同则返回0。10.根据权利要求1所述的一种基于视觉识别的机器人分拣中控系统,其特征在于:所述机器执行模块:用于根据接收到的产品类别信息将不同形状工件抓取至相应放置区,未接收到类别信息则保持初始状态。
技术总结
本发明公开了一种基于视觉识别的机器人分拣中控系统,具体涉及机器人分拣技术领域,本发明通过视觉识别进行灰度处理及边缘特征的提取,可以提高产品外形捕捉的准确度,并通过中控系统对流出产品进行识别决策,其采用像素点搜索的方式结合相似度测度算法对产品符合度进行决策,实现提高抓取精确度的操作,并且通过获取机器人执行目标的轨迹状态信息判断是否存在异常,对于异常状态则执行动作匹配保护动作,并通过声光报警的方式进行信号发出,则本系统可以提高产品匹配的精确度,以此达到精确分拣,确保正确投放的作业,并对于异常操作进行报警,进而可以得到及时处理解决,使得本系统具有优良的决策可靠性。使得本系统具有优良的决策可靠性。使得本系统具有优良的决策可靠性。
技术研发人员:杨肖 杨乐天 周忠华 胡文博
受保护的技术使用者:武汉华工赛百数据系统有限公司
技术研发日:2021.12.20
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。