一种基于多智能体的集群自适应重构行为建模方法
所属技术领域
1.本发明提供了一种基于多智能体的集群自适应重构行为建模方法,尤其使用了一种基于智能体的建模方法,能够准确有效描述集群自适应重构过程,属于可靠性建模技术领域。
背景技术:
2.作为未来战争的主要作战样式,集群以其功能结构上的开放、异构和分布式特征,规模上的分散化、低成本、可回收等优势,受到广泛关注,已成为武器装备发展的重要方向。然而,高动态、高对抗、高强度的战争环境加剧了作战任务和战场态势的不确定性,使集群在任务执行过程中面临更加复杂、频繁的内部协同和外部交互。特别地,当其受到内部故障、外部攻击或任务动态变化影响导致其组成要素状态变化、功能降级甚至损毁时,应对集群功能、性能和关键参数进行重新配置,完成适应性重构,以确保集群可靠运行。
3.为有效描述集群自适应重构过程,需进一步对其重构行为模型提出设计需求。因此,如何构建集群重构模型以准确表征其自适应重构行为是一个亟待解决的关键问题。然而,集群运行、故障/破坏、恢复过程存在多要素功能结构复杂、异质要素参与重构收益不均衡、要素恢复策略可选择等典型特征,这些将为其自适应重构行为建模带来新的挑战。
4.基于多智能体的建模方法可以在描述个体局部动态特征同时,通过个体、环境之间的局部交互反映全局行为,具有适应性好、可扩展性强等特点,对于集群行为建模具备显著优势。当前,基于多智能体的集群重构行为建模研究较少,现有重构建模方法多集中在编队队形重构,无法从状态、行为和交互规则方面对集群重构行为进行全面、准确描述。
5.本发明针对上述问题和挑战,提出了一种基于多智能体的集群自适应重构行为建模方法,可以为具有上述特征的集群自适应重构行为建模提供支撑。
技术实现要素:
6.本发明旨在为集群自适应重构行为提供一种基于多智能体的建模方法,该方法能够有效针对集群的复杂性、异构性特征,为集群的重构行为模型设计提供技术支持。
7.本方法的目的是提出一种基于多智能体的集群自适应重构行为建模方法,该方法主要包括以下步骤:
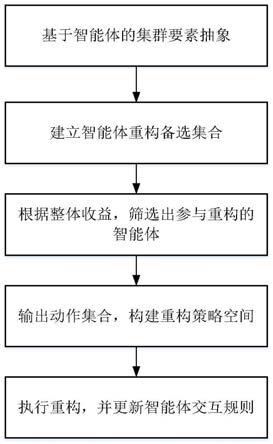
8.步骤一:基于智能体的集群要素抽象。
9.步骤二:建立智能体重构备选集合。具体包含以下4个子步骤:
10.步骤2.1面向任务需求的智能体分解,建立智能体及下层关重分系统集合;
11.步骤2.2建立智能体及下层分系统在t时刻的“正常/故障”状态矩阵;
12.步骤2.3根据当前状态信息,对状态矩阵中的元素进行0/1赋值。
13.步骤2.4定义能力阈值,并由此建立智能体能力强、弱相关集,优先使用强相关集中的智能体作为重构备选集合。
14.步骤三:根据整体收益,筛选出参与重构的智能体。
15.步骤四:输出智能体动作集合,构建重构策略空间。
16.步骤五:执行重构,并更新智能体交互规则。
附图说明
17.图1基于多智能体的集群自适应重构建模流程
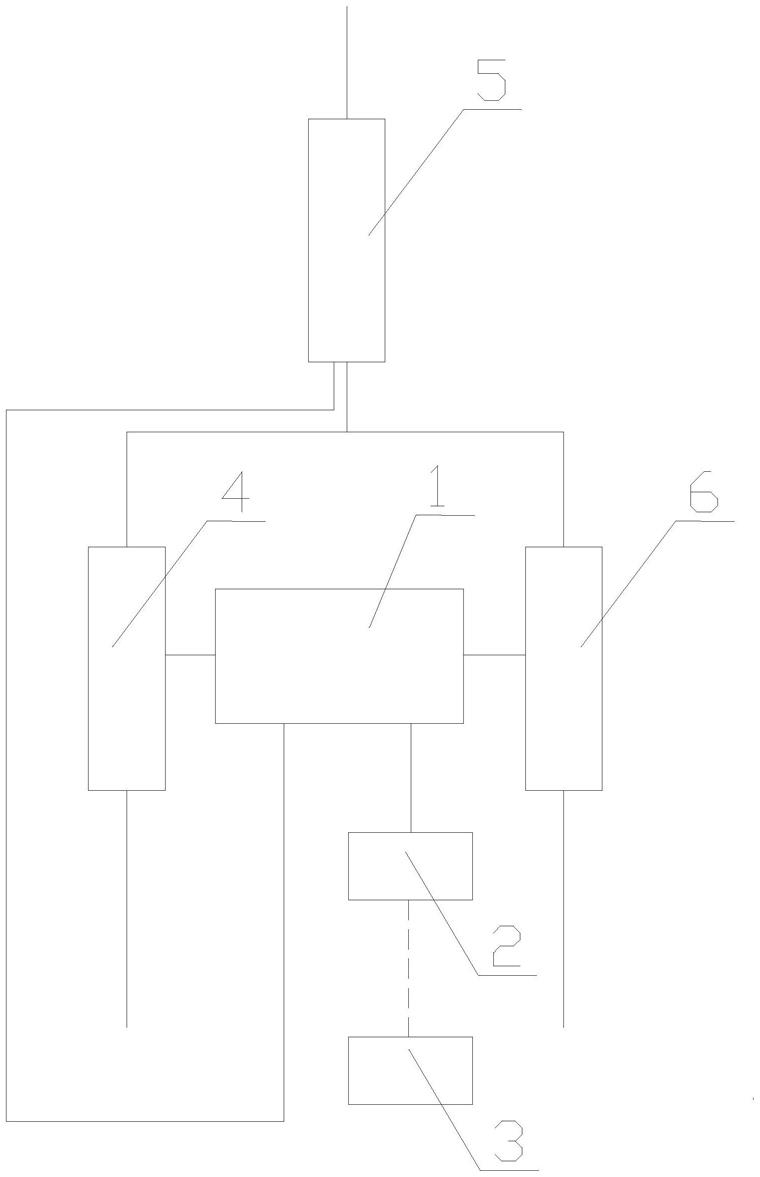
18.图2面向任务执行的无人机集群智能体行动图
具体实施方式
19.为使本发明的技术方案、特征及优点得到更清楚的了解,以下结合附图,作详细说明。
20.本发明的整体流程,如图1所示,下面以实例进一步说明本发明的实质内容,但本发明的内容并不限于此。
21.步骤一:基于智能体的集群要素抽象。
22.对集群开展面向智能体的分析,将其内部要素抽象为系统、任务、管理3类智能体。其中,任务类智能体是对空间内有限数量任务目标的抽象;系统类智能体是对集群中各要素的抽象,通常是实体装备;管理类智能体是对集群运行和重构过程中指挥与管理行为的抽象,是一种虚拟智能体,自身不包含特定的属性。
23.例1,以无人机集群为例,设无人机集群系统包含20架无人机,4个地面站(用于向无人机发送控指令),无人机与地面站通过无线数据链路进行通信,包括指令信息发送和状态数据回传。此外,在空间区域内分布40个不同任务目标,包括侦察、打击或诱导3类任务。由此,可将无人机、地面站、数据链路抽象为系统类智能体,任务目标抽象为任务类智能体,所有智能体的运行、交互以及重构过程均是在管理类智能体的框架下进行。
24.步骤二:建立智能体重构备选集合。具体包含以下4个子步骤:
25.步骤2.1面向任务需求的智能体分解,建立智能体及下层关重分系统集合;
26.步骤2.2建立智能体及下层分系统在t时刻的“正常/故障”状态矩阵;
27.步骤2.3根据当前状态信息,对状态矩阵中的元素进行0/1赋值。
28.步骤2.4定义能力阈值,并由此建立智能体能力强、弱相关集,优先使用强相关集中的智能体作为重构备选集合。
29.若将智能体集合记为u={u1,u2,...,un},n∈n
*
,则对于其中任意智能体ui,i=1,2,...,n,其关重分系统集合则表示为m∈n
*
为关重分系统的数量。基于此,可建立t时刻的“正常/故障”状态矩阵并根据集群当前状态信息,对中元素赋值,具体可表示为:
[0030][0031]
式中:矩阵元素a
ij
∈{1,0},i∈{1,2,...,n},j∈{1,2,...,m}代表状态,当a
ij
=1时,表示智能体ui的第j个关重分系统状态正常,可以完成相应任务;否则,为故障状态,
无法完成对应的任务。需要指出的是,当智能体的关重分系统状态全为0时,表示智能体完全损毁,不执行任何任务,也无法参与重构。
[0032]
进一步,定义一个实值常数t作为智能体能力阈值,计算每个智能体ui,i=1,2,...,n的关重分系统状态之和若满足则将该智能体划入能力强相关集u
p
,否则,划入弱相关集uw,特别地,若则直接将该智能体舍弃。
[0033]
例2,接例1。假设每架无人机均包含3个关重分系统,可分别支持无人机执行侦察、打击和诱导3类任务,因此,若将无人机智能体集合记u={u1,u2,...,u
20
},则对于其中任意一个无人机智能体ui,i=1,2,...,20,其关重分系统集合则表示为基于此,建立t时刻的“正常/故障”状态矩阵并假设当前状态信息,可得到:
[0034][0035]
由公式(2)可知,无人机u5,u
10
,u
15
,u
20
均整机损毁,不再具备任务执行能力亦无法参与重构。
[0036]
在此基础上,将能力阈值设置为t=2,此时,可建立强相关集为u
p
={u1,u2,u3,u6,u7,u8,u
11
,u
12
,u
13
,u
16
,u
17
,u
18
},弱相关集为uw={u4,u9,u
14
,u
19
}。
[0037]
同理,可得到地面站智能体的重构备选集合。
[0038]
步骤三:根据整体收益,筛选出参与重构的智能体。
[0039]
考虑任务执行过程中智能体状态、约束条件(包括资源费用、能耗以及执行时间)和目标函数,建立面向任务的集群智能体行动图,通过分步解算、判断,对重构备选集进行适应性搜索,筛选出参与重构的智能体。
[0040]
例3,接例2。对于重构备选集合中的全部无人机智能体,按照执行侦察、打击和诱导3类任务的功能情况,执行任务所需的资源费用cr(包括机场服务费用、人力人员费用、维修保障费用)、能耗ec(包括燃油消耗和电能消耗)和飞行时间δtf共3种约束条件以及目标函数f,建立面向任务执行的无人机集群智能体行动图,如图2所示。分步解算、判断,对重构备选集中全部元素的适应性搜索过程如下:
[0041]
step1:判断智能体ui的状态矩阵中元素状态是否满足任务所需的侦察、打击或诱导,若满足,进入下一步;若不满足,则拒绝ui参与重构;
[0042]
step2:判断智能体ui在执行任务时,是否能同时满足以下3个条件:1)所需的资源费用cr≤c
max
;2)所需的能耗ec≤e
max
;3)所需飞行时间δtf≤δt
max
;其中,c
max
为任务资源费用上限,e
max
为能耗阈值,δt
max
为能源可支持的最长飞行时间。若满足,进入下一步;若不满足,则拒绝ui参与重构。
[0043]
step3:将目标函数fi定义为任务整体收益,计算目标函数,即:
[0044]fi
=r
i-ciꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0045]
式中:ri为ui完成一个任务目标所获得的回报,ci为执行该任务的成本。若满足fi≥0,则进入下一步;否则,拒绝ui参与重构。
[0046]
step4:返回step1,直至u
p
中所有元素均执行完上述步骤为止。
[0047]
假设筛选出参与重构的无人机智能体共有3个,分别为:u1,u8,u
17
。
[0048]
同理,可筛选出参与重构的地面站智能体,并假设筛选结果为4个地面站智能体均参与重构。
[0049]
步骤四:输出智能体动作集合,构建重构策略空间。
[0050]
按照参与重构的智能体的实际状态,输出其“执行/不执行”动作集合,如表1所示。以智能体全部动作集合为基础,构建重构策略空间。
[0051]
表1参与重构的智能体动作集合
[0052]
智能体关重分系统动作集合us执行/不执行
[0053]
例4,接例3。对于参与重构的无人机智能体,根据其实际状态建立动作集合,如表2所示。其中,1表示执行动作,0表示不执行动作。
[0054]
表2参与重构的无人机智能体动作集合及描述
[0055][0056]
由此,可得到重构策略空间rs。根据表2易知,重构策略空间内共有种可能的重构策略。
[0057]
步骤五:执行重构,并更新智能体交互规则。
[0058]
根据重构策略空间,管理类智能体通过统一指挥与管理,使系统类智能体通过交互进行时空动态变换,执行重构行为;重构完成后,系统类、任务类智能体更新彼此交互规则。
[0059]
例5,接例4。假设采用重构策略空间rs中的任意一种重构策略ri,如无人机均执行侦察任务,则u1,u8,u
17
三个无人机智能体接收各自地面站智能体的指令,在规定时间内,由当前位置l1,l8,l
17
,前往执行相应任务所在的位置l1',l8',l1'7;随后,无人机智能体需与任务智能体建立交互关系,同时,将状态信息反馈至地面站智能体。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。