用于自动控制在自动存储和取回系统中操作的集装箱搬运车辆的移动的方法和系统
1.引言
2.本发明涉及一种用于控制在自动存储和取回系统中搬运存储集装箱的车辆的移动的方法、系统和计算机程序产品,该自动存储和取回系统包括网格结构和用于引导车辆的移动的相应轨道系统。更具体地,本发明涉及一种提供在存储和取回系统中搬运存储集装箱的车辆的移动的自动操作的方法和计算机程序。
背景技术:
3.存储和取回系统是公知的。操作这些的车辆由与每个车辆中的控制器通信的中央控制器(也称为主控制器)控制。
4.图1示出了典型的现有技术的自动存储和取回系统10,其具有框架结构100,并且其中,在框架结构100顶部的轨道系统108上运行时,集装箱搬运车辆150(也称为机器人)操作自动存储和取回系统10。
5.框架结构100包括多个直立构件102和可选地支撑直立构件102的多个水平构件103。构件102、103通常可以由金属(例如挤压铝型材)制成。
6.框架结构100限定了存储网格104,该存储网格104包括以垂直行布置的存储列105(存储柱,storage columns),其中,存储集装箱106(也称为箱)堆叠在彼此的顶部上以形成叠组107。每个存储集装箱106通常可以容纳多个产品项目。
7.自动存储和取回系统10包括用于引导集装箱搬运车辆150的轨道系统108。轨道系统108跨存储网格104的顶部以网格图案布置。集装箱搬运车辆150在轨道系统108上运行,并且被操作以将存储集装箱106降低到存储列105以及从存储列105升高存储集装箱106,以及在轨道系统108上运输存储集装箱106。存储列105的水平范围在图1中由粗线标记的网格单元122定义。网格单元122限定轨道系统108的布局。
8.轨道系统108包括:第一组平行轨道110,其被布置成引导集装箱搬运车辆150跨框架结构100顶部沿第一方向x移动;以及第二组平行轨道111,其被布置成垂直于第一组轨道110,以引导集装箱搬运车辆150沿垂直于第一方向x的第二方向y移动。以这种方式,轨道系统108限定了网格列,在该网格列上方,集装箱搬运车辆150可以在存储列105上方(即,在平行于水平x-y平面的平面中)横向移动。
9.每个集装箱搬运车辆150包括车身和八个车轮的车轮布置,其中,第一组四个车轮使得集装箱搬运车辆150能够沿x方向横向移动,并且第二组其余四个车轮使得集装箱搬运车辆150能够沿y方向横向移动。车轮布置中的一组或两组车轮可被提升和降低,使得第一组车轮和/或第二组车轮可与相应的一组轨道110、111接合,其中,这由控制集装箱搬运车辆150中的驱动装置的控制器来限定,用于集装箱搬运车辆150的受控定向移动。
10.每个集装箱搬运车辆150还包括用于垂直运输存储集装箱106的提升装置(未示出),例如,从存储列105提升存储集装箱106和将存储集装箱106下降到存储列105。提升装置包括适于接合存储集装箱106的一个或多个夹持/接合装置(未示出)。夹持/接合装置可
通过提升装置从车辆150降低,以沿与第一方向x和第二方向y正交的第三方向z调节夹持/接合装置的位置。
11.每个集装箱搬运车辆150包括存储室或空间(未示出),用于跨轨道系统108运输存储集装箱106时容纳和装载存储集装箱106。该存储空间可以包括设置在车身中央的空腔,例如,如在w02014/090684a1中所描述的,其内容通过引用并入本文。
12.可选地,集装箱搬运车辆150可以具有悬臂结构,如在第317366号中所描述的,其内容也通过引用并入本文。
13.在存储网格104中,大多数网格列是存储列105,即网格列105,其中,存储集装箱106存储在叠组107中。然而,存储网格104通常具有至少一个网格列,该网格列不用于存储存储集装箱106,而是由集装箱搬运车辆150用于卸货和/或拾取存储集装箱106,其可以被运输到第二位置(未示出),在该第二位置,可以从存储网格104的外部访问存储集装箱106或者将存储集装箱106转移出或转移到存储网格104中。在本领域中,这样的位置通常被称为“端口”,并且端口位于其中的网格列可以被称为“递送列”119。集装箱搬运车辆150的卸货和取货口被称为“递送列的上部端口”119。而递送列的相对端被称为“递送列的下部端口”。
14.图1中的存储网格104包括两个递送列119和120。例如,第一递送列119可以包括专用卸货端口,在该专用卸货端口中,集装箱搬运车辆150可以卸下存储集装箱106,以通过递送列119进行运输,并且进一步到达分转站或中转站(未示出),并且第二递送列120可以包括专用拾取端口,在该专用拾取端口中,集装箱搬运车辆150可以从分转站或中转站(未示出)拾取已经通过递送列120运输的存储集装箱106。第一递送列119和第二递送列120的每个端口可包括适于拾取和卸下存储集装箱106的端口。
15.可以从存储网格104的外部访问存储集装箱106的第二位置通常可以是产品项目从存储集装箱106移除或定位到其中的拾取站或存储站。在拾取站或存储站中,存储集装箱106通常从不从自动存储和取回系统10移除,而是一旦被访问就返回到存储网格104中。为了将存储集装箱转移出或转移到存储网格104中,在递送列中还设置有下部端口。这种下部端口例如用于将存储集装箱106传送到另一存储设施(例如,传送到另一存储网格),直接传送到运输车辆(例如,火车或货车),或传送到生产设施。
16.为了监测和控制自动存储和取回系统10,该系统包括中央控制系统(未示出),该中央控制系统通常是计算机化的并且包括数据库,该数据库用于跟踪存储集装箱106的位置以及在任何时间处理哪个存储集装箱106,即在存储网格104中取回或存储哪个存储集装箱106。除此之外,控制系统监测和控制在存储网格104上操作的每个集装箱搬运车辆150的位置和移动。以这种方式,每个集装箱搬运车辆150从中央控制系统接收移动指令,用于将特定的存储集装箱106从一个位置运输到另一位置而不相互碰撞。
17.为了控制在存储网格104上操作的集装箱搬运车辆150的交通流量,控制系统必须始终具有所有集装箱搬运车辆150的位置和移动的更新的概况。
18.当要访问存储在图1中公开的存储网格104中的存储集装箱106时,控制系统可以例如指示集装箱搬运车辆150之一从其在存储网格104中的当前位置取回存储集装箱106,并将其运输到或通过第一递送列119。该操作包括将集装箱搬运车辆150移动到目标存储集装箱106定位在其中的存储列105上方的网格位置,使用集装箱搬运车辆的提升装置(未示
出)从存储列105取出存储集装箱106,并将存储集装箱106运输到第一递送列119。如果目标存储集装箱106位于叠组107内的深处,即一个或多个其他存储集装箱堆叠在目标存储集装箱106上方,则操作将包括在从存储列105提升目标存储集装箱106之前在目标存储集装箱106上方临时移动存储集装箱106。该步骤在本领域中有时被称为“挖掘”,该步骤可以利用随后用于将目标存储集装箱106运输到递送列的相同的集装箱搬运车辆150或者利用一个或多个其他协作的集装箱搬运车辆150来执行。可替换地或附加地,自动存储和取回系统10可以具有专门用于从存储列105临时移除存储集装箱106的任务的集装箱搬运车辆150。一旦目标存储集装箱106已经从存储列105移除,临时移除的存储集装箱106可以重新定位到原始存储列105中,或者可替换地重新定位到其他存储列105。
19.当存储集装箱106将被存储在存储网格104中时,指示集装箱搬运车辆150中的一个从图1所示的第二递送列120拾取存储集装箱106,并将其运输到存储列105上方的网格位置并在该网格位置存储。在位于存储列叠组107内的目标位置处或上方的任何存储集装箱106已被移除之后,集装箱搬运车辆150将存储集装箱106放置在所需位置处。被移除的存储集装箱106然后可以被降低回到存储列105中或者被重新定位到其他存储列105。
20.除了上面参考图1描述的存储和取回系统10之外,申请人还开发了一种存储和取回系统,其中,集装箱搬运车辆150在存储网格104的上方和下方操作。在存储网格104下方操作的集装箱搬运车辆称为无人机。包括无人机的解决方案提高了搬运存储集装箱150时的效率,但是需要与中央控制系统和所有集装箱搬运车辆150的更多的通信。
21.当前的自动存储系统由主控制器控制,该主控制器将操作和移动指令发送到所有集装箱搬运车辆150,用于控制存储和取回系统10上的所有移动和操作。为此,主控制器将始终具有操作存储和取回系统10的所有车辆150的位置以及所有存储集装箱106的位置的总体概述。主控制器指示每个车辆150存储或取回存储集装箱106。每个车辆的当前位置连续地从车辆150传送到主控制器,从而使其能够以最佳方式控制所有车辆150在轨道系统108上的移动,而无需车辆150排队或碰撞。
22.在当前的解决方案中,这需要与每个集装箱搬运车辆150的连续无线电通信。在包括多个车辆150的较大系统中,大量的无线电通信可能是庞大的并且易受噪声等的影响。另一个问题是框架结构100本身可能对通信信号造成混淆。如果集装箱搬运车辆150在网格104(即,无人机)下方操作,则这尤其是个问题。
23.本发明通过一种方法和计算机程序产品减轻了所述问题,该方法和计算机程序产品要求减少主控制器与集装箱搬运车辆150之间的无线电业务,该集装箱搬运车辆150在存储和取回系统10的存储集装箱106上操作和搬运。
24.通过使操作存储和取回系统10的所有车辆150做出自动移动决定,主控制器仅需要向车辆分配任务,并且每个车辆将选择沿着轨道系统108从其当前位置到目的地要遵循的最佳路线。这将显著地降低每个集装箱搬运车辆106与主控制器之间的无线电通信以及中央处理的复杂性。
25.然而,当使用对轨道系统108上的移动做出自动移动决定的车辆时存在挑战。由于网格104是密集的并且其他车辆150可能遮挡车辆150的视图,所以难以预测其他车辆150的移动。利用距离传感器,容易跟随另一车辆,但是当交通密集时,它仍然难以跨越车道,并且其他车辆150的速度可能相对较高。这带来了一些车辆被保留的风险,即,由于高的交通负
荷而没有从端口位置进入被通行的“主干道”。这些方面也由本发明处理和解决。
技术实现要素:
26.本发明是如在主权利要求中定义的并且具有在从属权利要求中定义的附加特征的方法、计算机程序产品和系统。
27.更具体地,本发明通过一种用于自动控制在存储和取回系统中操作的集装箱搬运车辆的移动的方法来限定,该存储和取回系统包括具有存储列的网格结构和位于存储列上方的用于引导车辆的移动的相应轨道系统,车辆适于将存储集装箱转移到存储列和从存储列转移存储集装箱,其中,每个车辆包括连接到驱动装置(driving means)的车辆控制器和用于控制车辆沿着轨道系统相对于其他车辆的移动的移动的传感器。该方法的特征在于,在每个车辆的车辆控制器中执行下列步骤:
28.a)使用地图,该地图定义车辆能够在轨道系统上移动的位置和时间的轨道布局和交通规则,并且其中,地图对于在存储和取回系统中操作的所有车辆是相同的;
29.b)使车辆控制器与所有车辆共用的时钟同步;
30.c)从主控制器接收指示车辆相对于地图移动到轨道系统上的指定目的地的指令;
31.d)使车辆控制器基于地图、交通规则、到其他车辆的距离和其他车辆的移动来确定在轨道系统上从车辆的当前位置到指定目的地要遵循的路线;
32.e)根据所确定的路线来控制该车辆沿着轨道系统从其当前位置到指定目的地的移动,并且
33.f)重复步骤d)和e),直到车辆已经到达指定目的地。
34.根据本发明的一个实施例,根据对应于由存储和取回系统的存储列的水平范围的圆周所定义的网格单元的二维坐标来定义公共地图中的轨道布局,并且针对每个网格单元及其对应轨道定义交通规则。
35.这意味着每个网格单元是唯一定义的。由于操作存储和取回系统的每辆车辆使用相同的地图定义移动规则,所以每个车辆中的车辆控制器可以控制沿着轨道系统的车辆而不与其他车辆碰撞。
36.公共地图包括用于每个网格单元及其对应轨道的一组交通规则。不同组的交通规则可以用于不同的网格单元。例如,公共地图可以将一系列连接的单元定义为“主干道(main road)”,而将连接到“主干道”的单元定义为“辅路(side roads)”。地图还可以将一些网格单元定义为特定方向上的仅“单向交通”。另一规则可以是不使用一个或多个指定的网格单元,即,不在网格单元上通过或停止。另一规则可以是将网格单元定义为速度受限的,即,仅以设定的最大速度通过。
37.当组合不同的交通规则时,在同一轨道系统上操作的每个集装箱搬运车辆可以遵循详细的公共地图。每个车辆将根据它们的当前位置遵循不同的规则。
38.除了该组公共交通规则之外,可以对某些时隙应用不同组的交通规则。这样,可以根据例如特定需要和一天中的时间来改变交通模式。
39.每个车辆的当前位置可以以不同的方式确定。一种方式是通过检测通过的轨道交叉口的数量以及轨道交叉口从初始位置通过的方向来确定位置。初始位置可以通过检测所有车辆的当前位置的外部装置来获取,优选地当所有车辆停止时,这通常是在启动系统或
重置系统时。
40.如上所述,该方法的一个步骤是使每个车辆的车辆控制器与相同的公共时钟同步。
41.指示每个车辆相对于公共地图移动到指定目的地。在目的地,车辆将执行诸如取回或存储存储集装箱的任务。
42.当每个车辆已经接收到包括目的地网格单元的指令时,车辆控制器基于公共地图确定从车辆的当前位置到指定目的地的要遵循的路线。车辆控制器将根据交通规则和到其他车辆的距离来规划和制定路线。
43.车辆控制器可以根据交通规则、到其他车辆的距离和其他车辆的移动来调节和/或改变车辆的速度和移动。
44.车辆控制器还可以根据车辆的当前位置和到其他车辆的距离以及其他车辆的移动来调节和/或改变车辆的设定路线。
45.当所有车辆与相同的公共时钟同步时,它们根据公共地图被控制,并且所有移动将平滑地运行,而不必由主控制器连续地控制。这将显著地减少车辆与主控制器之间的通信以及中央处理的复杂性。
46.根据本发明的方法可以在不同类型的车辆中执行,诸如在存储和取回系统中操作的机器人和无人机。它特别适用于机器人和无人机两者在搬运存储集装箱时协作的系统。机器人是在存储和取回系统的顶部上操作的自动车辆,而无人机是在车辆下方或存储和取回系统的网格结构下方的水平上操作的自动车辆。
47.在相同水平上运行的车辆必须遵循相同的公共地图。由于机器人和无人机在不同的水平上操作,它们可以遵循定义不同交通规则的地图。
48.本发明进一步由包括指令的计算机程序产品限定,当在包括在自动集装箱搬运车辆中的车辆控制器的处理器中执行时,该指令执行上述用于在存储和取回系统中搬运存储集装箱的方法。
49.本发明进一步由一种用于自动控制在存储和取回系统中操作的集装箱搬运车辆的移动的系统限定,该存储和取回系统包括具有存储列的网格结构和位于存储列上方的用于引导车辆的相应轨道系统,该车辆适于将存储集装箱转移到存储列和从存储列转移存储集装箱,其中,每个车辆包括连接到驱动装置的车辆控制器和用于控制车辆沿着轨道系统相对于其他车辆的移动的移动的传感器,其中,该系统包括适于与每个车辆中的车辆控制器通信的主控制器。
50.主控制器适于:
[0051]-将地图发送到在存储和取回系统中操作的所有车辆的车辆控制器,其中,地图定义车辆可在轨道系统上移动的位置和时间的轨道布局和交通规则,并且其中,地图对于所有车辆是相同的;
[0052]-将同步信号发送到所有车辆控制器,使得所有车辆控制器与所有车辆共用的时钟同步;
[0053]
每个车辆控制器适于:
[0054]-从主控制器接收指示车辆相对于地图移动到轨道系统上的指定目的地的指令;
[0055]-基于地图、交通规则、到其他车辆的距离和其他车辆的移动来确定在轨道系统上
从车辆的当前位置到指定目的地要遵循的路线;
[0056]-根据所确定的路线来控制该车辆沿着轨道系统从其当前位置到指定目的地的移动。
具体实施方式
[0057]
现在将参考附图更详细地并且仅通过示例的方式描述本发明的实施例,其中:
[0058]
图1示出了典型的现有技术自动存储和取回系统,其中,集装箱搬运车辆正在搬运存储集装箱;
[0059]
图2是示出当执行根据本发明的方法时所涉及的不同步骤的流程图;
[0060]
图3示出了根据地图的车辆的移动的示例,并且
[0061]
图4示出了能够自动控制集装箱搬运车辆的移动的每个车辆的车辆控制器、驱动装置和传感器。
[0062]
如上参考图1所述,在现有技术的存储和取回系统中操作的车辆由主控制器控制,该主控制器具有所有车辆在任何时间的移动的总体概述。在具有多个车辆的较大系统中,具有这种总体概述需要主控制器与车辆之间的大量连续通信,使得信号易于受到干扰并且可能通过信号损失。
[0063]
本发明通过一种方法、系统和计算机程序产品来解决和处理该问题,该方法、系统和计算机程序产品使每个车辆能够控制其自身相对于其他车辆的移动的移动。
[0064]
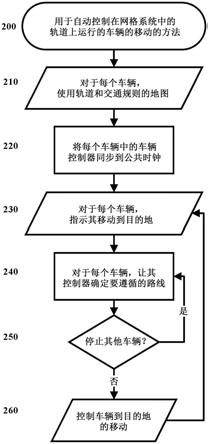
图2示出了在用于自动控制在网格系统中的轨道上运行的车辆的移动的方法200中执行的不同步骤。
[0065]
如上所述,集装箱搬运车辆150在存储和取回系统10中操作,该存储和取回系统10包括具有网格单元122的网格结构和相应轨道系统108,该轨道系统108用于引导车辆的移动以将存储集装箱转移到网格单元122和从网格单元122转移存储集装箱。每个车辆150包括连接到驱动装置420的车辆控制器410(参考图4)和用于控制车辆150沿着轨道系统108相对于其他车辆150的移动的移动的传感器430。车辆控制器410信号连接到主控制器400以交换信息。
[0066]
根据本发明,用于自动控制车辆150的移动的方法200包括在每个车辆150的车辆控制器410中执行的不同步骤。
[0067]
第一步骤210使用定义轨道系统108的轨道布局和交通规则的地图。每个车辆设置有相同的地图,该地图具有存储和取回系统的轨道布局的信息以及相同的交通规则,该交通规则限定车辆可以在轨道上移动的位置和时间。下面将参考图3描述交通规则的示例。
[0068]
地图可以以不同的方式提供给每个车辆150。当建立新的存储和取回系统时,在系统上运行的每个车辆可以将地图预先安装在连接到其控制器的非易失性存储器中。地图的更新版本可以在每个车辆150操作之后被发送到每个车辆150并安装在每个车辆150中。
[0069]
除了轨道系统108的轨道布局和每个网格单元122的交通规则之外,公共地图还针对每个网格单元122定义了时隙,该时隙定义了不同交通规则对每个网格单元122有效的时间间隔。每个时隙可以定义用于在每个网格单元122上移动的“虚拟交通灯”,例如“绿色交通灯”意味着车辆150可以移动,而“红色交通灯”意味着车辆150必须等待。为此,所有车辆必须根据相同的时间基准(即,公共时钟)来工作。
[0070]
该方法的第二步骤220是根据公共时钟同步每个车辆的车辆控制器410中的时钟。当执行所述第一步骤210和第二步骤220时,所有车辆150准备正常操作和接收包括适于每个车辆的信息的指令,例如移动到哪个网格单元122和执行哪个任务。该任务例如可以是拾取存储在存储列105中的特定存储集装箱150,该存储列105对应于其被指示移动到的网格单元122。
[0071]
在正常操作期间重复和执行下一步骤,即,当所有车辆控制器410已经设置有公共地图并且它们的时钟同步时。
[0072]
在正常操作期间,每个车辆控制器410将从主控制器400接收指令,该指令包括它将移动到哪个目的地网格单元122以及它将执行哪个操作。这由图2中的步骤230示出。当车辆控制器410已经接收到该信息时,下一步骤240是让车辆150中的车辆控制器410确定车辆150应当在轨道系统108上从其当前位置到目的地网格单元122采取的路线。沿着轨道的所有移动都是根据公共地图进行的。
[0073]
在其沿轨道移动期间,参考步骤250,不断地检查其他车辆是否太靠近或将变得靠近以及其是否应当停止。可以通过安装在车辆中的距离传感器来确定车辆与另一车辆的接近程度。通过不断地检测和更新到其他车辆150的当前距离,可以确定它们的移动,例如,如果它们正远离或朝向车辆150的确定路线移动,则它们正快速运行。
[0074]
如果确定必须停止,则重新进入步骤240,并且再次确定路线。这可以是新路线或与车辆150先前所遵循的路线相同的路线,并且其中,相同的路线在停止之后被清除。
[0075]
如果确定车辆150可在不停止的情况下遵循到目的地网格单元122的确定路线,参考步骤260,车辆控制器410将控制车辆150行驶到目的地网格单元122并执行其指令操作。然后准备接收新指令或根据先前接收的指令计划到另一目的地网格单元122的新路线。
[0076]
当每个集装箱搬运车辆150包括同步控制器(时钟与相同的公共时钟同步)和用于确定其位置和到其他集装箱搬运车辆150的距离的传感器装置,并且根据定义交通规则的相同公共地图进行控制时,车辆将安全地移动,而不必由外部主控制器进行控制。
[0077]
在存储和取回系统10下方操作的无人机没有挖掘活动并且通常具有较不密集的网格。因此,用于无人机的一组交通规则可比为在存储和取回系统的顶部上操作的车辆150定义的交通规则更简单。当使用车辆150和无人机两者来操作存储和取回系统时,在网格结构的上方和下方两者都提供无线电接入点。通过使用根据上述方法控制的车辆,由于不需要主控制器与车辆之间的通信,所以需要更少的无线电接入点。
[0078]
公共地图中基于虚拟时隙的“交通灯”和交通规则将允许每个车辆150在从其当前位置移动到目的地网格单元122时的自动交通决策。这不需要与中央控制器或其他车辆通信。每个车辆到达目的地点所应采取的路线由每个车辆150中的车辆控制器410确定。因此,沿着轨道引导车辆不需要与主控制器400或其他车辆连续通信。
[0079]
当车辆150已经到达其目的地时,它将报告给主控制器400,并且然后准备接收新的指令,例如,下一目的地和要执行的任务。
[0080]
本发明还由包括指令的计算机程序产品限定,当在包括在自动车辆150中的车辆控制器410的处理器中执行时,该指令执行上述用于控制集装箱搬运车辆150在存储和取回系统10中的移动的方法。
[0081]
图3示出了根据定义交通规则的中央地图的车辆150的移动的示例。可以对每个网
格单元122应用不同的交通规则,例如,速度限制;车辆150可以通过网格单元122但不在其上停止;车辆只能沿定义方向通过等。
[0082]
该地图仅示出了在取回和存储系统10的网格104的顶部上的每个网格单元122的顶部上的轨道系统108的一部分。图中的每个车辆150是由数字(即01至08)标识的集装箱搬运车辆150。该地图示出了在每个x方向上被定义为“主干道”的一系列网格单元122。这意味着这些网格单元122用作集装箱搬运车辆150的主运输路线。
[0083]
标记为01、02、05和08的车辆150在主运输路线(即“主干道”)上行驶。由于交通规则在特定时隙应用于每个网格单元122,所以特定隙将定义网格单元122的“交通灯”,从而定义车辆150的交通状况。
[0084]
为了进入“主干道”,位于端口位置上方的标记为03、04、06和07的车辆150将需要具有“绿色交通灯”的时隙,用于通过在y方向上移动而进入主干道上的网格单元122,并且它们移动到的网格单元122必须不被另一车辆150占用。
[0085]
该图示出了一个特定的时隙,其中,车辆04具有“绿色交通灯”,用于在“主干道”上沿y方向移动到网格单元122,而已经在“主干道”上移动的车辆01和02具有“红色交通灯”,并且必须停止在它们当前的网格单元122上。然后,车辆04可以移动到“主干道”上。
[0086]
车辆06和07当前正忙于在它们的端口位置处操作,并且因此即使它们具有“绿色交通灯”也不在轨道上移动。当车辆06和07准备移动到另一网格单元122时,它们必须首先等待在它们要行驶的方向上具有“绿色交通灯”的时隙。
[0087]
图4示出了每个车辆150包括连接到驱动装置420的车辆控制器410和用于自动控制集装箱搬运车辆的移动的传感器430。每个车辆控制器410与主控制器400通信以接收操作指令并响应操作指令。
[0088]
根据本发明,在存储和取回系统10中操作的车辆150各自从包括网格单元122的主控制器400接收命令,车辆150将在没有关于遵循哪个路线或速度的任何进一步信息的情况下移动到该网格单元122。基于定义交通规则的公共地图及其距离传感器,每个车辆150做出其自己关于遵循哪个路线和以哪个速度的决定。车辆可以在其去往目的地位置(例如网格单元122)的路上改变或优化其当前路线。如果当前路线被阻塞,则可以规划新路线。当所有车辆的车辆控制器是时间同步的,遵循为每个网格单元122定义交通规则的同一公共地图时,以及当它们使用距离传感器来连续更新到其他车辆150的当前距离时,所有车辆将安全地移动。
[0089]
在以上描述本发明时使用的上下文是自动存储(autostore)存储和取回系统,其可以包括传统的自动存储网格,其中,集装箱搬运车辆在取回和存储网格的顶部上操作,以及用于无人驾驶运输的网格,其在取回和存储网格的较低层或下方操作。用于无人驾驶运输的网格通常连接多个自动存储网格,但也可用于运输到拣选站或外部搬运。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
