基于状态反馈x-lms算法的发动机主动悬置控制方法
技术领域
1.本发明涉及机械系统动力学建模及振动控制领域,更具体地说是一种基于状态反馈x-lms算法的发动机主动悬置控制方法。
背景技术:
2.发动机作为汽车振动的主要振源之一,直接影响汽车的nvh性能。发动机悬置是减小发动机振动对汽车nvh性能的影响的最有效的手段。在不同频率条件下,发动机悬置性能的要求是不同的:在低频区大振幅振动时,为了限制动力总成的振动幅度并快速衰减振动,需要悬置元件具有较大的刚度和阻尼;在高频小振幅振动时,为了获得较低的振动传递率,需要悬置元件具有较小的刚度和阻尼。因此,理想的悬置需要能够根据发动机的运行工况,自适应调节自身参数以满足发动机不同的工作需求。发动机主动悬置在相应的控制方法作用下,能够在低频时利用被动悬置的隔振性能获得大刚度、大阻尼,来抑制发动机的位移幅值,而在高频时利用作动器的作动力,降低动刚度来有效隔离发动机振动,降低车内噪音。因此,在发动机主动振动控制技术中,主动振动控制方法直接决定了主动振动控制的效果,是主动振动控制的核心技术之一。
3.在发动机主动悬置控制技术方面,已经有大量的控制方法得到了应用pid方法、lqr方法、模型参考控制方法、h2和h
∞
两种鲁棒控制方法、滑膜控制方法、线性矩阵不等式控制方法等。但是这些主动振动控制方法所擅长的频率范围是不同,比如基于随机干扰假设的最优控制,在原理上存在不同程度的低频相对位移控制和高频隔振性能的折中处理,不能适应宽频带振动控制。
技术实现要素:
4.本发明为解决上述现有技术所存在的不足,提出一种具有计算量小、易于实现且自适应能力强的基于状态反馈x-lms算法的发动机主动悬置控制方法,以期能够实现整个频率范围内的最优控制,从而提高发动机主动悬置的控制性能,并能克服传统x-lms算法以激励信号作为参考信号的缺点。
5.本发明为解决技术问题采用如下技术方案:
6.本发明一种基于状态反馈x-lms算法的发动机主动悬置控制方法的特点在于,按如下步骤进行:
7.步骤1:采集振动数据:
8.步骤1.1:设定循环次数为k,并且初始化k=1;
9.步骤1.2:定义第k次循环的状态向量为xk=[x
1.k x
2.k x
3.k x
4.k
]
t
,其中,x
1.k
为第k次循环的发动机振动位移,x
2.k
为第k次循环的发动机振动速度,x
3.k
为第k次循环的簧载质量振动位移,x
4.k
为第k次循环的簧载质量振动速度;
[0010]
令为xk的估计值,为x
1.k
的估计值,为x
2.k
的估计值,为x
3.k
的估计值,为x
4.k
的估计值;
[0011]
步骤1.3:由位移传感器测量第k次循环的发动机与簧载质量之间的相对位移x
r.k
,由力传感器测量第k次循环的发动机振动时通过主动悬置传递给簧载质量的动态力f
d.k
;
[0012]
步骤2:根据发动机、主动悬置、簧载质量、悬架组成的发动机主动悬置系统的离散状态方程,建立如式(1)-式(9)所示的sage-husa卡尔曼滤波器,用于估计状态变量值:
[0013]
步骤2.1、利用式(1)计算第k次循环的一步预测均方误差p
k,k-1
:
[0014][0015]
式(1)中,g为状态矩阵,g
t
为g的转置矩阵,p
k-1
为第k-1次循环的均方误差,h2为第二输入系数矩阵,为h2的转置矩阵,为第k-1次循环的第二输入变量f
in.k-1
的协方差矩阵;
[0016]
步骤2.2、利用式(2)计算第k次循环的状态向量xk的一步预测估计值
[0017][0018]
式(2)中,为第k-1次循环的状态向量x
k-1
的估计值,h1为第一输入系数矩阵,f
c.k-1
为第k-1次循环的第一输入变量,为第k-1次循环的第二输入变量f
in.k-1
的均值;
[0019]
步骤2.3、利用式(3)计算第k次循环的残差vk:
[0020][0021]
式(3)中,e(k)表示第k次循环的残余振动,且e(k)=[x
r.k
,f
d.k
]
t
,c为第一输出系数矩阵,d为第二输出系数矩阵,rk为第k次循环的测量噪声ηk的均值;
[0022]
步骤2.4、利用式(4)计算第k次循环的增益矩阵kk:
[0023]kk
=p
k,k-1ct
[cp
k,k-1ct
rk]-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0024]
式(4)中,c
t
为第一输出系数矩阵c的转置矩阵,rk为第k次循环的测量噪声ηk的协方差;
[0025]
步骤2.5、利用式(5)计算第k次循环的均方误差pk:
[0026]
pk=(i-kkc)pk(i-kkc)
t
k
krkkkt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0027]
式(5)中,i为单位矩阵,k
kt
为增益矩阵kk的转置矩阵;
[0028]
步骤2.6、利用式(6)计算第k次循环的状态向量xk的估计值
[0029][0030]
步骤2.7、利用式(7)计算第k次循环的加权系数dk:
[0031]dk
=(1-b)/(1-b
(k 1)
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0032]
式(7)中,b为遗忘因子;
[0033]
步骤2.8、利用式(8)计算第k次循环的第二输入变量f
in.k
的均值:
[0034][0035]
步骤2.9、利用式(9)计算第k次循环的第二输入变量f
in.k
的协方差矩阵:
[0036][0037]
步骤3:利用式(10)计算第k次循环的第一输入变量f
c.k
:
[0038][0039]
式(10)中,为第k次循环的第j个状态变量x
j.k
的估计值对应的n
×
1阶矢量,且其中,为第k-(n-1)次循环第j个状态变量x
j.k-(n-1)
的估计值,n为lms滤波器的阶数,为的转置向量,w
j.k
为第k次循环的n
×
1阶抽头权向量,且w
j.k
=[w
j0.k w
j1.k w
j2.k
…wjn-1.k
]
t
,w
jn-1.k
为第k次循环第n-1个抽头权值;
[0040]
步骤4:利用式(11)对第k次循环的参考信号进行滤波:
[0041][0042]
式(11)中,为m
×
n的矩阵,且c为控制通道传递函数对应的n
×
m阶矩阵有限脉冲滤波器;
[0043]
步骤5:利用式(12)得到第k 1次循环的抽头向量w
j.k 1
:
[0044][0045]
式(12)中,l为目标权值矩阵;λ固定收敛因子,γ为控制因子;
[0046]
步骤6:所述主动悬置根据所述第k次循环的第一输入变量f
c.k
输出相应主动控制力;
[0047]
步骤7:将k 1赋值给k后,返回步骤1.2执行,直至由位移传感器测量得到发动机与簧载质量之间的相对位移x
r.k
以及力传感器测量得到发动机振动通过主动悬置传递给簧载质量的动态力f
d.k
的均方差值最小为止。
[0048]
与已有技术相比,本发明有益效果体现在:
[0049]
1、本发明基于状态反馈x-lms算法,以发动机主动悬置系统的状态作为参考信号,克服了传统x-lms算法依赖激励信号作为参考信号的缺点,并具有传统x-lms算法的优点,适应于发动机主动悬置的宽频带控制。
[0050]
2、本发明基于状态反馈x-lms算法针对发动机主动悬置系统的状态变量并不是全部可测的,采用步骤2所述的sage-husa卡尔曼滤波器来实现发动机主动悬置系统状态的估计,控制方法适应能力强。
附图说明
[0051]
图1为本发明所涉的发动机主动悬置系统的示意图;
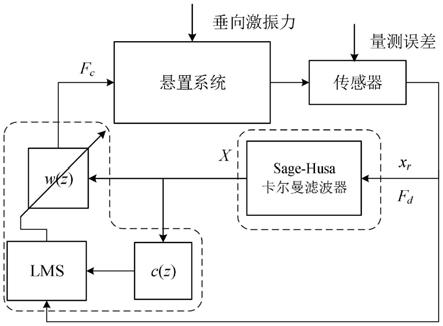
[0052]
图2为本发明所涉的基于状态反馈控制x-lms算法的发动机主动悬置系统的控制原理。
具体实施方式
[0053]
本实施例中,一种基于状态反馈x-lms算法的发动机主动悬置控制方法,是先基于
sage-husa卡尔曼滤波器的系统状态估计;再基于状态反馈的主动控制力的计算;最后基于残余振动信号均方差的抽头权向量计算。具体的说,是按如下步骤进行:
[0054]
步骤1:如图1所示,利用式(1)建立发动机主动悬置系统动力学模型:
[0055][0056]
式(1)中,x为状态向量且x=[x
1 x
2 x
3 x4]
t
,为x的导数,x1为发动机振动位移,x2为发动机振动速度且为发动机振动速度且为x1的导数,x3为簧载质量振动位移,x4为簧载质量振动速度且速度且为x3的导数,a为状态矩阵,b1为主动控制力输入矩阵,b2为激振力输入矩阵,e为残余振动,即发动机与簧载质量之间的相对位移和发动机振动时通过主动悬置传递给簧载质量的动态力,c为观测矩阵,d为传递矩阵,fc为主动控制力,f
in
为发动机垂向激振力,η为测量噪声,me和mb分别为四分之一发动机质量及簧载质量,ks和bs分别为悬架刚度和阻尼,km和bm分别为主动悬置刚度和阻尼。
[0057][0058][0059][0060][0061][0062]
步骤2:对式(1)表示的发动机主动悬置系统动力学模型离散化:
[0063]
[0064]
式(2)中,g=expm(at),h1=a-1
·
(g-i)
·
b1,h2=a-1
·
(g-i)
·
b2,xk=[x
1.k x
2.k x
3.k x
4.k
]
t
为第k次循环的状态向量,其中,x
1.k
为第k次发动机振动位移,x
2.k
为第k次循环的发动机振动速度,x
3.k
为第k次循环的簧载质量振动位移,x
4.k
为第k次循环的簧载质量振动速度。x
k-1
为第k-1次循环的状态向量,f
c.k-1
为第k-1次循环的主动控制力,f
in.k-1
为第k-1次循环的发动机垂向激振力,f
c.k
为第k次循环的主动控制力,ηk为第k次循环的测量噪声,ek为第k次循环的残余振动。
[0065]
步骤3:采集振动数据:
[0066]
步骤3.1:设定循环次数为k,并初始化k=1;
[0067]
步骤3.2:定义为xk的估计值,为x
1.k
的估计值,为x
2.k
的估计值,为x
3.k
的估计值,为x
4.k
的估计值。
[0068]
步骤3.3:由位移传感器测量第k次循环的发动机与簧载质量之间的相对位移x
r.k
,由力传感器测量第k次循环的发动机振动时通过主动悬置传递给簧载质量的动态力f
d.k
;
[0069]
步骤4:根据式(2)所示发动机主动悬置系统离散状态方程,建立如式(3)-式(11)所示的sage-husa卡尔曼滤波器,用于估计状态变量值。
[0070]
步骤4.1、利用式(3)计算第k次循环的一步预测均方误差p
k,k-1
:
[0071][0072]
式(3)中,g为状态矩阵,g
t
为g的转置矩阵,p
k-1
为第k-1次循环的均方误差,h2为第二输入系数矩阵,为h2的转置矩阵,为第k-1次循环的发动机垂向激振力f
in.k-1
协方差矩阵。
[0073]
步骤4.2、利用式(4)计算第k次循环的状态向量xk的一步预测估计值
[0074][0075]
式(4)中,为第k-1次循环的状态向量x
k-1
的估计值,h1为第一输入系数矩阵,为第k-1次循环的发动机垂向激振力f
in.k-1
的均值。
[0076]
步骤4.3、利用式(5)计算第k次循环的残差vk:
[0077][0078]
式(5)中,e(k)=[x
r.k
,f
d.k
]
t
,rk为第k次循环的测量噪声ηk的均值。
[0079]
步骤4.4、利用式(6)计算第k次循环的增益矩阵kk:
[0080]kk
=p
k,k-1ct
[cp
k,k-1ct
rk]-1
ꢀꢀꢀꢀ
(6)
[0081]
式(6)中,c
t
为观测矩阵c的转置矩阵,rk为第k次循环的测量噪声ηk的协方差。
[0082]
步骤4.5、利用式(7)计算第k次循环的均方误差pk:
[0083]
pk=(i-kkc)pk(i-kkc)
t
k
krkkkt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0084]
式(7)中,i为单位矩阵,k
kt
为增益矩阵kk的转置矩阵。
[0085]
步骤4.6、利用式(8)计算第k次循环的状态向量xk的估计值
[0086][0087]
步骤4.7、利用式(9)计算第k次循环的加权系数dk:
[0088]dk
=(1-b)/(1-b
(k 1)
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0089]
式(9)中,b为遗忘因子。
[0090]
步骤4.8、利用式(10)计算第k次循环的发动机垂向激振力f
in.k
的均值:
[0091][0092]
步骤4.9、利用式(11)计算第k次循环的发动机垂向激振力f
in.k
协方差矩阵:
[0093][0094]
步骤5:利用式(12)计算第k次循环的主动控制力f
c.k
:
[0095][0096]
式(12)中,为第k次循环的第j个状态变量x
j.k
的估计值对应的n
×
1阶矢量,其中,为第k-(n-1)次循环第j个状态变量x
j.k-(n-1)
的估计值,n为lms滤波器阶数,为的转置向量,w
j.k
为第k次循环的n
×
1阶抽头权向量,w
j.k
=[w
j0.k w
j1.k w
j2.k
…wjn-1.k
]
t
,w
jn-1.k
为第k次循环第n-1个抽头权值。
[0097]
步骤6:利用式(13)对第k次循环的参考信号进行滤波:
[0098][0099]
式(13)中,为m
×
n的矩阵,c为控制通道传递函数对应的n
×
m阶矩阵有限脉冲滤波器;
[0100]
步骤7:利用式(14)得到第k 1次循环的抽头向量w
j.k 1
:
[0101][0102]
式(14)中,l为目标权值矩阵;λ固定收敛因子,γ为避免fj(k)
tfj
(k)过小的控制因子。
[0103]
步骤8:主动悬置输出第k次循环的主动控制力f
c.k
;
[0104]
步骤9:k 1赋值给k后,返回步骤3.2执行,直至由位移传感器测量得到发动机与簧载质量之间的相对位移x
r.k
以及力传感器测量得到发动机振动通过主动悬置传递给簧载质量的动态力f
d.k
的均方差值最小为止。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。