1.本发明涉及无人机航拍定点技术领域,特别是一种无人机航拍图片中心点经纬度误差优化方法。
背景技术:
2.目前我国光伏产业规模持续扩大,行业发展总体趋好。伴随着我国光伏行业的进一步发展,预计未来几年,光伏行业市场容量将呈现出逐年增长态势。据预测,到2022年我国光伏累计装机容量将达141gw。随着并网发电的光伏电站规模越来越大,后期运营和维护业务将成为未来电站板块中增长最快的业务。
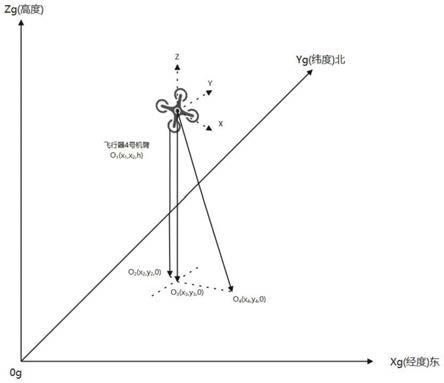
3.目前在光伏场站使用的无人机巡检热斑检测技术,通过红外相机拍摄的图片进行热斑检测获得热斑在图片中的位置,再根据无人机提供的经纬度信息作为无人机云台相机拍摄图片的中心点经纬度,最后获取图片中热斑实际对应的经纬度信息。以大疆m300 rtk飞行器搭载zenmuse h20t云台为例构成一个巡检无人机,无人机高空飞行时需要不断地进行修正并产生不同程度的抖动。图1所示,o1点为飞行器4号机臂rtk天线的经纬度信息和高度信息,o2点为飞行器四号机臂在抖动时垂直到地面对应的真实位置经纬度,o3点为云台接口中心位置作为相机垂直向下拍照图片中心点位置经纬度,o4点是云台相机在抖动时拍摄的图片中心点对应的经纬度位置坐标。由设备自身误差和无人机高空定点飞行产生的抖动,对航拍图片中心点的经纬度产生一定误差。为提高最终光伏板热斑定位精度,因此无人机任意航向正确获取图片中心点经纬度位置信息o4点至关重要。
技术实现要素:
4.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
5.鉴于现有技术中存在的问题,提出了本发明。
6.因此,本发明所要解决的技术问题是现有技术存在无人机设备本身和空中抖动,导致无人机航拍图片中心点的经纬度存在误差,造成采集结果不准确。
7.为解决上述技术问题,本发明提供如下技术方案:一种无人机航拍图片中心点经纬度误差优化方法,其包括建立飞行器姿态模型,计算出通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量,再构建机体坐标系和大地坐标系之间的关系;建立相机姿态模型,计算出相机垂直地面拍照中心点通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量,再构建机体坐标系和大地坐标系之间的关系;cgcs2000坐标系动态获取地球半径,通过cgcs2000坐标系获取当前地球半径;以及,优化图片中心点经纬度误差,通过飞行器姿态模型计算和相机姿态模型计算获取无人机航拍图片中心点经纬度。
8.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:飞行器姿态模型建立:通过飞行器姿态角和rtk天线当前经纬度,结合rtk天线到云台接
口中心的补偿量构建四元数,计算出通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量,再通过构建机体坐标系和大地坐标系之间的关系,计算出通过偏航角变换后的补偿量,及rtk天线到云台中心在大地坐标系上正北方向的偏移量和正东方向的偏移量。
9.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:相机姿态模型建立:通过相机姿态角,结合rtk天线到地面的高度构建四元数,计算出相机垂直地面拍照中心点通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量,再通过构建机体坐标系和大地坐标系之间的关系,计算出通过偏航角变换后的补偿量,及相机拍照中心点位置变换后在大地坐标系上正北方向的偏移量和正东方向的偏移量。
10.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:cgcs2000坐标系动态获取地球半径:通过cgcs2000坐标系,获取长半轴,短半轴,扁率,第一偏心率,第二偏心率参数,根据当前纬度信息动态获取当前地球半径。
11.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:优化图片中心点经纬度误差:通过飞行器姿态模型计算的偏移量和相机姿态模型计算的偏移量,获取最终rtk天线位置到相机拍照中心点在地面上对应位置的偏移量,再结合动态获取的地球半径和当前rtk天线位置的经纬度,最终获取无人机航拍图片中心点经纬度。
12.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:飞行器姿态模型建立包括,计算出从z点到o点抖动之后的偏移量,构建四元数旋转向量v1并优化设备抖动误差;四元数旋转向量v1,经过构建的四元数q
13
旋转后,获得旋转后的四元数向量v
1/
;计算飞行器经过偏航角变换后,将机体坐标系xy轴的偏移量映射到大地坐标系xgyg轴上的偏移量。
13.作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:通过将偏航角λ1取值范围[-180
°
,180
°
]分为四个区间[-180
°
,-90
°
)、[-90
°
,0
°
)、[0
°
,90
°
)、[90
°
,180
°
]四种情况,分别讨论大地坐标系上的偏移量δx1和δy1。
[0014]
作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:相机姿态模型建立包括,构建四元数旋转向量v3=[0,0,0,-(h δz1)],通过俯仰角α3和侧滚角β3,构建两个四元数q
31
和q
32
,由四元数q
31
和q
32
获得新的四元数q
33
,四元数旋转向量v3,经过q
33
旋转后,获得旋转后的四元数向量v
3/
,计算相机垂直地面中心点位置经过俯仰角α3和侧滚角β3变换后,将机体坐标系xy轴的偏移量映射到大地坐标系xgyg轴上的偏移量。
[0015]
作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:cgcs2000坐标系动态获取地球半径包括,获取w-第一基本纬度函数、v-第二基本纬度函数、m-子午圈曲率半径和n-卯酉圈曲率半径;获取当前纬度地球半径r(平均曲率半径),纬圈半径r。
[0016]
作为本发明所述无人机航拍图片中心点经纬度误差优化方法的一种优选方案,其中:优化图片中心点经纬度误差包括,获取xg轴偏移量δx,yg轴偏移量δy,获取拍摄图片中心点的经纬度坐标。
[0017]
本发明的有益效果:
[0018]
(1)巡检效率高,大幅缩减光伏电站巡检所需人数及巡检时间,节省人力运维成本,
[0019]
(2)智能无人机机动性高,在空中飞行不受地面障碍物限制,实现自由移动。针对
光伏电站幅员辽阔,地形起伏等特点,运用无人机巡检省时又省力;
[0020]
(3)全自动飞行诊断,结合历史数据分析,可对光伏电站进行全面评估,还可对电站故障的出现进行有效预测;
[0021]
(4)提升了电站巡检频次,有效提高电站巡检效率与精确性;
[0022]
(5)解决了电站建设类型不同,组件难于巡检的难题,及以往人工巡检可能带来的人员安全问题。
附图说明
[0023]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0024]
图1为第一、二个实施例中的无人机图片中心点经纬度误差说明示意图。
[0025]
图2为第一、二个实施例中的飞行器补偿示意图。
[0026]
图3为第一、二个实施例中的飞行器设备偏航角[-90
°
,0
°
)偏移量计算示意图。
[0027]
图4为第一、二个实施例中的相机垂直地面中心点位置俯仰和侧滚变换后偏移量计算示意图。
[0028]
图5为第一、二个实施例中的相机中心点偏航角[-90
°
,0
°
)偏移量计算示意图。
[0029]
图6为第一、二个实施例中的cgcs2000参考椭球示意图。
具体实施方式
[0030]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
[0031]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
[0032]
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
[0033]
实施例1
[0034]
参照图1~6,为本发明第一个实施例,该实施例提供了一种无人机航拍图片中心点经纬度误差优化方法,其包括建立飞行器姿态模型、建立相机姿态模型、cgcs2000坐标系动态获取地球半径和优化图片中心点经纬度误差四大步骤。
[0035]
通过无人机航拍采集提供的经纬度信息,作为航拍图片中心点经纬度计算故障点经纬度的基础信息,对其进行使用和计算,可避免无人机设备产生的误差和相机抖动产生的误差,影响其计算结果精准度,进而最终获取优化后的航拍图片中心点经纬度信息。
[0036]
无人机在飞行的过程中,需要建立地面坐标系0gxgygzg与机体坐标系0xyz来确定姿态角的信息,通过建立联系后,进而获取图片中热斑实际对应的经纬度信息,完成信息采集结果。
[0037]
进一步的,无人机在飞行的过程中,俯仰角α为飞行器绕机体坐标系x轴旋转的角度,定位为水平为0,向下俯冲为正,后仰为负;侧滚角β为飞行器轴绕机体坐标系y轴旋转的角度,定义为水平为0,左倾为负,右倾为正;偏航角λ为飞行器绕地面坐标系zg轴旋转的角度,定义为正北为0,东半部0~180,西半部0~-180。飞行器与云台在飞行过程中,得到各自的姿态角。α1,β1,λ1为飞行器姿态角,α2,β2,λ2为云台姿态角。
[0038]
飞行器姿态模型建立:通过飞行器姿态角和rtk天线当前经纬度,结合rtk天线到云台接口中心的补偿量构建四元数,计算出通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量。再通过构建机体坐标系和大地坐标系之间的关系,计算出通过偏航角变换后的补偿量,及rtk天线到云台中心在大地坐标系上正北方向的偏移量和正东方向的偏移量。
[0039]
相机姿态模型建立:通过相机姿态角,结合rtk天线到地面的高度构建四元数,计算出相机垂直地面拍照中心点通过俯仰角和侧滚角综合变换后在机体坐标系上的偏移量。再通过构建机体坐标系和大地坐标系之间的关系,计算出通过偏航角变换后的补偿量,及相机拍照中心点位置变换后在大地坐标系上正北方向的偏移量和正东方向的偏移量。
[0040]
cgcs2000坐标系动态获取地球半径:地球为一个椭球形,地球半径也在实时发生变化。通过cgcs2000坐标系,获取长半轴,短半轴,扁率,第一偏心率,第二偏心率参数,根据当前纬度信息动态获取当前地球半径。
[0041]
优化图片中心点经纬度误差:通过飞行器姿态模型计算的偏移量和相机姿态模型计算的偏移量,获取最终rtk天线位置到相机拍照中心点在地面上对应位置的偏移量,再结合动态获取的地球半径和当前rtk天线位置的经纬度,最终获取无人机航拍图片中心点经纬度。
[0042]
实施例2
[0043]
参照图1~6,为本发明第二个实施例,该实施例基于上一个实施例:
[0044]
飞行器姿态模型建立包括
[0045]
步骤1.1:
[0046]
由于飞行器四号机臂与云台接口中心之间存在补偿,如图2所示,以云台接口中心点为原点建立机体坐标系,z点为飞行器四号机臂获取的经纬度信息,rtk天线在各轴上的补偿大小为a,b,c。通过z点经纬度计算得出云台中心o点的经纬度信息。计算从z点到o点抖动之后的偏移量,构建四元数旋转向量v1=[0,-a,b,-c]。
[0047]
步骤1.2:
[0048]
计算飞行器经过俯仰角与侧滚角变换后在机体坐标系上的偏移量,通过俯仰角α1和侧滚角β1,构建两个四元数q
11
和q
12
。旋转向量v1,先旋转q
11
再旋转q
12
,与先经过q
12
旋转再经过q
11
旋转,两次获得旋转后的向量不同。直接相乘存在顺序问题,因此将q
11
和q
12
切成n份,每次只乘q
11
和q
12
的1/n一共乘n次,不管q
11
在前还是q
12
在前,当n趋近于无穷大时,只有两端和不同,且对结果影响很小:
[0049][0050]
其中式中:q11、q12:属于四元数,代表旋转角度
[0051]
单位四元数q有另外一种表示形式,其中是一半的旋转角,u
是单位长度的旋转轴,同时也可以使用指数表示通过四元数相关性质,可得新的四元数q
13
:
[0052][0053]q13
代替q
11
和q
12
综合影响下的旋转,优化设备抖动误差。
[0054]
步骤1.3:
[0055]
四元数旋转向量v1,经过q
13
旋转后,获得旋转后的四元数向量v
1/
。
[0056]
v1
/
=q
13v1q13
*=q
13v1q13-1
[0057]
由四元数向量v
1/
=m1 a1i b1j c1z,可以获得飞行器四号机臂到云台接口中心的补偿在抖动后机体坐标系x轴的偏移量δx1=a1,y轴上的偏移量δy1=b1,z轴上的偏移量δz1=c1。
[0058]
步骤1.4:
[0059]
计算飞行器经过偏航角变换后,将机体坐标系xy轴的偏移量映射到大地坐标系xgyg轴上的偏移量。通过将偏航角λ1取值范围[-180
°
,180
°
]分为四个区间[-180
°
,-90
°
)、[-90
°
,0
°
)、[0
°
,90
°
)、[90
°
,180
°
]四种情况,分别讨论大地坐标系上的偏移量δx1和δy1。如图3所示,以飞行器偏航角λ1∈[-90
°
,0
°
)为例,θ1=-λ1,可以获得设备抖动误差在大地坐标系上xg轴偏移量δx1和yg轴偏移量δy1。
[0060]
δy1=-δy
1 cos(θ1)-δx
1 sin(θ1)
[0061]
δx1=δy
1 sin(θ1)-δx
1 cos(θ1)
[0062]
其中式中,δx1:代表在大地坐标系上的xg轴偏移量;δy1:代表大地坐标系上xg轴偏移量。
[0063]
相机姿态模型建立包括:
[0064]
步骤2.1:
[0065]
通过大量数据验证和模式不同的选择,根据飞行器姿态角α1,β1,λ1和云台姿态角α2,β2,λ2,首先估算当前相机拍照时对应的真实姿态信息俯仰角α3,侧滚角β3,偏航角λ3。相机的偏移量与无人机当前高度h和设备在z轴上的偏移量δz1有关,构建四元数旋转向量v3=[0,0,0,-(h δz1)]。
[0066]
步骤2.2:
[0067]
计算相机中心点垂直地面的位置经过俯仰角与侧滚角变换后在机体坐标系上的偏移量。通过俯仰角α3和侧滚角β3,构建两个四元数q
31
和q
32
。由四元数q
31
和q
32
获得新的四元数q
33
。四元数旋转向量v3,经过q
33
旋转后,获得旋转后的四元数向量v
3/
。
[0068]
步骤2.3:
[0069]
根据俯仰角α3和侧滚角β3综合变换,在机体坐标系上存在四种情况,(α3》=0,β3》=0),相机中心点落在第三象限;(α3》=0,β3《0),相机中心点落在第四象限;(α3《0,β3》=0),相机中心点落在第二象限;(α3《0,β3《0),相机中心点落在第一象限。以(α3《0,β3《0)为例,如图4所示,向量ho等于四元数向量v3,向量ha等于四元数向量v
3/
。向量ha没有与xy轴平面相交,因此计算机体坐标系x轴与y轴的偏移量分为以下几步:(1)通过向量ho与向量ha计算出(2)计算ob长度;(3)计算hb长度;(4)由向量ha与hb长度,计算向量hb;(5)向量ob=
向量hb-向量ho;(6)由向量ob获得机体坐标系x轴的偏移量δx3=oc,y轴上的偏移量δy3=od。
[0070]
步骤2.4:
[0071]
计算相机垂直地面中心点位置经过俯仰角α3和侧滚角β3变换后,将机体坐标系xy轴的偏移量映射到大地坐标系xgyg轴上的偏移量。通过将相机偏航角λ3取值范围[-180
°
,180
°
]分为四个区间[-180
°
,-90
°
)、[-90
°
,0
°
)、[0
°
,90
°
)、[90
°
,180
°
]四种情况,分别讨论大地坐标系上的偏移量δx3和δy3。如图5所示,以飞行器偏航角λ3∈[-90
°
,0
°
)为例,θ3=-λ3,可以获得设备抖动误差在大地坐标系上xg轴偏移量δx3和yg轴偏移量δy3。此处与飞行器设备偏航角[-90
°
,0
°
)偏移量计算不同,由机体坐标系中心点计算变换后的相机中心点位置,因此在坐标系上偏移量的符号相反。
[0072]
δy3=δy
3 cos(θ3) δx
3 sin(θ3)
[0073]
δx3=-δy
3 sin(θ3) δx
3 cos(θ3)
[0074]
其中式中,δx3:代表在大地坐标系上的xg轴偏移量;δy3:代表大地坐标系上xg轴偏移量。
[0075]
cgcs2000坐标系动态获取地球半径包括:
[0076]
cgcs2000坐标系,是我国当前最新的国家大地坐标系。如图6所示,将地球视为一个椭圆。通过cgcs2000坐标系,可以获取相关参数:长半轴a,短半轴b,扁率f,第一偏心率e1,第二偏心率e2。根据无人机飞行器4号机臂获取的纬度lat,计算当前纬度的地球半径。
[0077]
步骤3.1:
[0078]
获取w-第一基本纬度函数,v-第二基本纬度函数:
[0079][0080][0081]
步骤3.2:
[0082]
获取m-子午圈曲率半径,n-卯酉圈曲率半径:
[0083]
m=a*(1-e
12
)/(w*w*w)
[0084]
n=m*v*v
[0085]
步骤3.3:
[0086]
获取当前纬度地球半径r(平均曲率半径),纬圈半径r:
[0087][0088]
优化图片中心点经纬度误差包括:
[0089]
无人机获取得纬度lat,经度long。第一步获取设备误差在xg轴偏移量δx1和yg轴偏移量δy1,第二部获取相机抖动拍摄后的中心点在xg轴偏移量δx3和yg轴偏移量δy3。
[0090]
步骤4.1:
[0091]
获取xg轴偏移量δx,yg轴偏移量δy:
[0092]
δy=δy1 δy3[0093]
δx=δx1 δx3[0094]
步骤4.2:
[0095]
获取拍摄图片中心点的经纬度坐标(图1中o4点的经纬度):
[0096]
lat_new=lat δy/r*180/pi
[0097]
long_new=long δx/r*180/pi
[0098]
其中式中,long_new:代表经度坐标;
[0099]
lat_new:代表纬度坐标:
[0100]
为解决上述技术问题,本发明还提供了一种基于5g mec电力物联网设备本地互联接入系统,技术方案如下:
[0101]
1.使用四元数算法的使用,根据四元数算法的性质,可以获取俯仰角和侧滚角综合影响变换后的状态,优化先俯仰角变换再侧滚角变换或者先侧滚角变换再俯仰角变换带来的误差;
[0102]
2.对机体坐标系和大地坐标系进行转换,将姿态角分为两个部分,俯仰角和侧滚角为一组在机体坐标系上计算,偏航角为一组在机体坐标系上结合大地坐标系,来最终确定对应的偏移量,减少姿态角组合计算中带来的误差;
[0103]
3.通过cgcs2000坐标系动态获取地球半径,减少地球半径计算经纬度偏移量时的误差。
[0104]
本发明的有益效果:
[0105]
国内光伏电站一般建设在大型山坡、戈壁、平原、沼泽、水域、厂房顶部、居民屋顶等,不同的光伏电站规模、形式、分布等均具有较大的差别。导致在后期的运维巡检过程中,存在很多不便。特别是光伏发电项目规模越大,电站巡检工作的复杂性越强,在对此种类型电站项目进行巡检工作时,一方面,常规的人工巡检方式不仅需要耗费大量的人工及时间成本,导致电站设备巡检不及时,影响电厂的经济效益;另一方面巡检人员工作也存在一定的危险性。
[0106]
本发明方法通过无人机航拍采集提供的经纬度信息,作为航拍图片中心点经纬度计算故障点经纬度的基础信息,对其进行使用和计算,解决了无人机设备本身和空中抖动产生的误差和相机抖动产生的误差,最终获取了优化后的航拍图片中心点经纬度信息。
[0107]
重要的是,应注意,在多个不同示例性实施方案中示出的本技术的构造和布置仅是例示性的。尽管在此公开内容中仅详细描述了几个实施方案,但参阅此公开内容的人员应容易理解,在实质上不偏离该申请中所描述的主题的新颖教导和优点的前提下,许多改型是可能的(例如,各种元件的尺寸、尺度、结构、形状和比例、以及参数值(例如,温度、压力等)、安装布置、材料的使用、颜色、定向的变化等)。例如,示出为整体成形的元件可以由多个部分或元件构成,元件的位置可被倒置或以其它方式改变,并且分立元件的性质或数目或位置可被更改或改变。因此,所有这样的改型旨在被包含在本发明的范围内。可以根据替代的实施方案改变或重新排序任何过程或方法步骤的次序或顺序。在权利要求中,任何“装置加功能”的条款都旨在覆盖在本文中所描述的执行所述功能的结构,且不仅是结构等同而且还是等同结构。在不背离本发明的范围的前提下,可以在示例性实施方案的设计、运行状况和布置中做出其他替换、改型、改变和省略。因此,本发明不限制于特定的实施方案,而是扩展至仍落在所附的权利要求书的范围内的多种改型。
[0108]
此外,为了提供示例性实施方案的简练描述,可以不描述实际实施方案的所有特征(即,与当前考虑的执行本发明的最佳模式不相关的那些特征,或于实现本发明不相关的那些特征)。
[0109]
应理解的是,在任何实际实施方式的开发过程中,如在任何工程或设计项目中,可做出大量的具体实施方式决定。这样的开发努力可能是复杂的且耗时的,但对于那些得益于此公开内容的普通技术人员来说,不需要过多实验,所述开发努力将是一个设计、制造和生产的常规工作。
[0110]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。