1.本发明涉及一种医疗机器人领域装置,尤其涉及一种联动结构和用于介入手术机器人的龙门架。
背景技术:
2.血管介入手术中医生需要长期接收x射线的辐射,为此工程上开发了远程操作的主从式血管介入手术机器人,使得医生可以在射线环境之外控制介入机器人执行血管介入手术。
3.在进行介入手术时,需要调节介入手术机器人转动,以使其上的导管导丝等介入器件对准患者的血管(如胳膊桡动脉、腿部股动脉等),以便后续通过介入手术机器人执行手术。但是在实际研发时发现,介入手术机器人与移动台车和导管床体的对接过程存在卡顿、操作繁琐和安全隐患等问题。
技术实现要素:
4.基于此,有必要针对现有技术中的不足,提供一种新型的联动结构和用于介入手术机器人的龙门架。
5.一种联动结构,包括:联动凸轮结构和联动锁紧结构;
6.所述联动凸轮结构包括联动轴、设置在所述联动轴上的第一凸轮轴和第二凸轮轴;所述联动锁紧结构包括第一锁紧结构和第二锁紧结构;
7.所述第一锁紧结构的一端与所述第一凸轮轴抵接、另一端用于在所述第一凸轮轴的作用下,释放或者锁紧第一待锁结构;
8.所述第二锁紧结构的一端与所述第二凸轮轴抵接、另一端用于在所述第二凸轮轴的作用下,释放或者锁紧第二待锁结构。
9.优选地,所述第一凸轮轴和第二凸轮轴被构造为:当所述第一凸轮轴释放第一待锁结构,则所述第二凸轮轴锁紧第二待锁结构;当所述第一凸轮轴锁紧第一待锁结构,则所述第二凸轮轴释放第二待锁结构。
10.优选地,所述第一凸轮轴最长向径所在的平面和第二凸轮轴最长向径所在的平面形成的角度在0
°
到180
°
之间。
11.优选地,所述联动结构还包括联动安装座;所述联动凸轮结构还包括安装在所述联动安装座上的第一轴承座和第二轴承座;
12.所述联动凸轮结构还包括用于限位所述联动轴的限位组件;
13.所述限位组件包括安装在第一轴承座上的第一限位件和设置在所述联动轴上的限位槽;
14.所述第一限位件与限位槽配合,以限位所述联动轴。
15.优选地,所述联动凸轮结构还包括与所述联动轴连接的手柄;所述手柄位于所述联动轴端部。
16.优选地,所述联动结构还包括联动安装座;所述联动凸轮结构还包括安装在所述联动安装座上的第一轴承座和第二轴承座;
17.第一锁紧结构包括第一锁紧座和第一锁紧组件;
18.第一锁紧座安装在所述联动安装座上,与第一轴承座相对设置;
19.第一锁紧组件穿设于所述第一锁紧座内,且一端与所述第一凸轮轴抵接、另一端用于与所述第一待锁结构抵接。
20.优选地,第一锁紧组件包括依次连接的第一连接件、第一弹性件和第一锁紧件;
21.所述第一连接件伸出所述第一锁紧座一端,并与所述第一凸轮轴抵接;
22.所述第一锁紧件穿出所述第一锁紧座另一端,用于与第一待锁结构抵接。
23.优选地,所述联动结构还包括联动安装座;所述联动凸轮结构还包括安装在所述联动安装座上的第一轴承座和第二轴承座;
24.所述第二锁紧结构包括第二锁紧座和第二锁紧组件;
25.所述第二锁紧座与第二轴承座相对设置;
26.所述第二锁紧组件穿设于所述第二锁紧座内,且一端与所述第二凸轮轴抵接、另一端用于与第二待锁结构抵接。
27.优选地,第二锁紧组件包括依次连接的第二连接件、第二弹性件和第二锁紧件;
28.所述第二连接件伸出所述第二锁紧座一端,并与所述第二凸轮轴抵接;
29.所述第二锁紧件穿出所述第二锁紧座另一端,用于与第二待锁结构抵接。
30.优选地,所述联动结构还包括与系统控制组件连接的检测结构,所述检测结构用于对所述第一待锁结构和/或所述第二待锁结构的释放或者锁紧进行检测,并生成检测信号发送给所述系统控制组件。
31.综上所述,本发明所提供的联动结构中,利用第一凸轮轴驱动第一锁紧结构控制第一待锁结构,利用第二凸轮轴驱动第二锁紧结构控制第二待锁结构;以实现联动控制,操作简单高效。
32.本发明还提供一种用于介入手术机器人的龙门架,包括机架、安装在机架上的台车对接结构和床体对接结构、以及如上所述的联动结构;
33.所述台车对接结构用于与移动台车对接;所述床体对接结构用于与导管床体对接;
34.所述第一锁紧结构的另一端穿设于所述床体对接结构,用于在所述第一凸轮轴的作用下,释放或者锁紧导管床体;
35.所述第二锁紧结构的另一端穿设于所述台车对接结构,用于在所述第二凸轮轴的作用下,释放或者锁紧移动台车;
36.所述第一凸轮轴和第二凸轮轴被构造为:当所述第一凸轮轴释放导管床体,则所述第二凸轮轴锁紧移动台车;当所述第一凸轮轴锁紧导管床体,则所述第二凸轮轴释放移动台车。
37.优选地,所述联动结构安装在所述机架底部并通过第一锁紧结构连接于所述台车对接结构、通过第二锁紧结构连接于床体对接结构。
38.优选地,所述床体对接结构和联动结构分别对应地设置两个,两个所述联动结构的联动轴分别穿设于所述机架底部两端并可滑动调节以让两个所述床体对接结构之间的
距离适配不同宽度的导管床体。
39.综上所述,本发明所提供的用于介入手术机器人的龙门架中,当所述第一凸轮轴释放导管床体,则所述第二凸轮轴锁紧移动台车;当所述第一凸轮轴锁紧导管床体,则所述第二凸轮轴释放移动台车,以实现联动控制。
附图说明
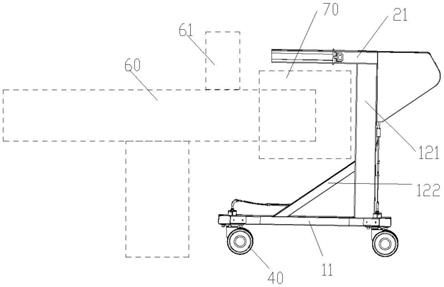
40.图1为本发明安装有介入手术机器人的龙门架的结构示意图。
41.图2为本发明用于介入手术机器人的龙门架的结构示意图。
42.图3为本发明联动结构的结构示意图,其中,虚线表示所述第一凸轮轴最长向径所在的平面和第二凸轮轴最长向径所在的平面。
43.图4为本发明联动结构的拆解图。
44.图中,10、机架;
45.20、台车对接结构;
46.30、床体对接结构;
47.40、联动安装座;41、移动导轨;
48.50、联动凸轮结构;51、联动轴;52、第一凸轮轴;53、第二凸轮轴;54、第一轴承座;55、第二轴承座;56、限位组件;561、第一限位件;562、限位槽;563、第二限位件;57、手柄;
49.60、联动锁紧结构;61、第一锁紧结构;611、第一锁紧座;612、第一锁紧组件;613、第一连接件;614、第一弹性件;615、第一锁紧件;62、第二锁紧结构;621、第二锁紧座;622、第二锁紧组件;623、第二连接件;624、第二弹性件;625、第二锁紧件;
50.70、检测结构;71、感应片;72、感应器;
51.80、介入手术机器人。
具体实施方式
52.为了使发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释发明,并不用于限定发明。
53.如图1至图4所示,本发明提供一种用于介入手术机器人的龙门架,该龙门架包括机架10、安装在机架10上的台车对接结构20和床体对接结构30、以及如下的联动结构;台车对接结构20用于与移动台车(图中未显示)对接;床体对接结构30用于与导管床体(图中未显示)对接;联动结构包括联动凸轮结构50和联动锁紧结构60;联动凸轮结构50包括联动轴51、设置在联动轴51上的第一凸轮轴52和第二凸轮轴53;联动锁紧结构60包括第一锁紧结构61和第二锁紧结构62;第一锁紧结构61的一端与第一凸轮轴52抵接、另一端穿设于床体对接结构30,用于在第一凸轮轴52的作用下,释放或者锁紧导管床体;第二锁紧结构62的一端与第二凸轮轴53抵接、另一端穿设于台车对接结构20,用于在第二凸轮轴53的作用下,释放或者锁紧移动台车。
54.第一凸轮轴52最长向径所在的平面与第二凸轮轴53最长向径所在的平面形成的角度在0
°
(包括)到180
°
(包括)之间。在本实施例中,第一凸轮轴52和第二凸轮轴53为椭圆形,即第一凸轮轴52的长轴所在的平面和第二凸轮轴53的长轴所在的平面形成的角度在0
°
(包括)到180
°
(包括)之间,换言之,从联动轴51的轴向方向投影,第一凸轮轴52的长轴对应的投影和第二凸轮轴53的长轴对应的投影在同一平面内相交,因此,当所述第一凸轮轴52释放导管床体,则所述第二凸轮轴53锁紧移动台车;当所述第一凸轮轴52锁紧导管床体,则所述第二凸轮轴53释放移动台车,以实现联动控制。当然,若是需要同时锁紧导管床体和移动台车,或者同时释放导管床体和移动台车,则从联动轴51的轴向方向投影,第一凸轮轴52的长轴对应的投影和第二凸轮轴53的长轴方向对应的投影在同一平面内重合,即形成的角度为0
°
或180
°
。在另外的实施例中,即使第一凸轮轴52的长轴对应的投影和第二凸轮轴53的长轴方向对应的投影在同一平面内不重合,也可以实现同时锁紧导管床体和移动台车,或者同时释放导管床体和移动台车。而且根据需要待锁紧或者待释放对象的数量,所述联动轴51上的凸轮轴可以对应设置多个。
55.示例性地,如图3所示,第一凸轮轴52和第二凸轮轴53设置在同一联动轴51,且从联动轴的轴向方向看,两长轴在同一投影面上呈正交设置,则转动联动轴51使第一凸轮轴52和第二凸轮轴53同时转动,以实现第一凸轮轴52驱动第一锁紧结构61锁紧导管床体,同时第二凸轮轴53驱动第二锁紧结构62释放移动台车;或者,第一凸轮轴52驱动第一锁紧结构61释放导管床体,同时第二凸轮轴53驱动第二锁紧结构62锁紧移动台车,利用一个联动轴51可同时控制第一锁紧结构61和第二锁紧结构62,不需要分开设置多个控制结构,简化操作步骤;还可以节省制作成本和龙门架的整体安装空间,集成度较高,可以避免出现龙门架移位翻转等意外情况,还可以避免医生忘记锁紧龙门架和移动台车,或者龙门架和导管床体等。
56.具体地,当不进行介入手术时,将安装有介入手术机器人80的龙门架移动在移动台车上,此时,第二锁紧结构62锁紧移动台车,以保证龙门架与移动台车稳固连接,便于搬运和维护介入手术机器人80;当需要进行介入手术时,则医护人员先将安装有龙门架的移动台车搬运至导管床体,通过龙门架的床体对接结构30与导管床体进行对接,此时,龙门架的全部重量由移动台车承受,龙门架的床体对接结构30在导管床体上滑动顺畅不卡顿,当龙门架的床体对接结构30滑动到位后,转动联动轴51,利用第一锁紧结构61将床体对接结构30锁紧在导管床体上,同时第二锁紧结构62释放移动台车,将移动台车推离导管床体,实现安装有介入手术机器人80的龙门架稳固地固定在导管床体上,操作简单高效。可以理解地,当移动台车与龙门架对接的时候,龙门架的全部重量则由导管床体承受,移动台车在台车对接结构20上滑动顺畅不卡顿。
57.具体地,如图2和图3所示,机架10包括相对设置的两个支撑梁和用于连接两个支撑梁的连接横梁;台车对接结构20包括两个分别对应移动台车的两轨道的台车对接组件,两个台车对接组件相对设置在两个支撑梁内侧面;床体对接结构30包括两个分别对应导管床体的两边轨的床体对接组件,对应两个支撑梁,联动结构的数量为两个,每一联动结构包括与对应支撑梁末端可拆卸地连接的联动安装座40,每一床体对接组件30安装在相应联动安装座40上,本实施例中,两个台车对接组件20分别位于相应联动安装座40上方,两个床体对接组件30位于相应联动安装座40下方,以实现联动控制,可以理解地,两个台车对接组件20和两个床体对接组件30位于其他位置也可以实现联动控制,在此不做限定。其中,每一联动安装座40上设置有移动导轨41,支撑梁末端设置有与移动导轨41配合的移动导槽,因此,可以通过调节两个联动安装座40之间的距离,从而调节两个床体对接组件30之间的宽度,
以适应不同宽度的导管床体。可以理解地,为便于操作,两个联动结构可以为主从控制关系,即一个联动结构可以带动另一个联动结构运动,因此,医护人员控制一个联动结构即可,提高操作效率,在此不做限定。
58.进一步地,联动结构安装在台车对接结构20和床体对接结构30中间,可以保证受力均衡,避免介入手术机器人80翻转等意外情况。
59.本发明还提供一种联动结构,联动结构包括联动安装座40、联动凸轮结构50和联动锁紧结构60。联动凸轮结构50包括联动轴51、设置在联动轴51上的第一凸轮轴52和第二凸轮轴53;联动锁紧结构60包括第一锁紧结构61和第二锁紧结构62;第一锁紧结构61的一端与第一凸轮轴52抵接、另一端用于在第一凸轮轴52的作用下,释放或者锁紧第一待锁结构;第二锁紧结构62的一端与第二凸轮轴53抵接、另一端用于在第二凸轮轴53的作用下,释放或者锁紧第二待锁结构。
60.第一凸轮轴52最长向径所在的平面与第二凸轮轴53最长向径所在的平面形成的角度在0
°
(包括)到180
°
(包括)之间。在本实施例中,第一凸轮轴52和第二凸轮轴53为椭圆形,即第一凸轮轴52的长轴所在的平面和第二凸轮轴53的长轴所在的平面形成的角度在0
°
(包括)到180
°
(包括)之间,即从联动轴的轴向方向投影,第一凸轮轴52长轴平面对应的投影和第二凸轮轴53长轴平面对应的投影相交,因此,当所述第一凸轮轴释放第一待锁结构,则所述第二凸轮轴锁紧第二待锁结构;当所述第一凸轮轴锁紧第一待锁结构,则所述第二凸轮轴释放第二待锁结构,以实现联动控制。
61.示例性地,第一凸轮轴52和第二凸轮轴53设置在同一联动轴51且两长轴平面呈正交设置,则转动联动轴51将使第一凸轮轴52和第二凸轮轴53同时转动,以实现第一凸轮轴52驱动第一锁紧结构61锁紧第一待锁结构,同时第二凸轮轴53驱动第二锁紧结构62释放第二待锁结构;或者,第一凸轮轴52驱动第一锁紧结构61释放第一待锁结构,同时第二凸轮轴53驱动第二锁紧结构62锁紧第二待锁结构,即一个联动轴51可同时控制第一锁紧结构61和第二锁紧结构62,不需要分开设置多个控制结构,简化操作步骤;还可以节省制作成本和安装空间,集成度较高。以联动结构应用在用于介入手术机器人的龙门架为例,此时,第一待锁结构为导管床体,第二待锁结构为移动台车,在其他的实施例中,第一待锁结构和第二待锁结构可以是分离的结构,也可以是设置在同一装置的结构,在此不做限定。
62.如图3和图4所示,联动凸轮结构50还包括安装在联动安装座40上的第一轴承座54和第二轴承座55、用于限位联动轴51的限位组件56、连接于联动轴51一端并用于转动联动轴51的手柄57;组装时,联动轴51转动地穿设于第一轴承座54和第二轴承座55,便于转动联动轴51;第一凸轮轴52位于第一轴承座54和第二轴承座55之间;第二凸轮轴53位于联动轴51的另一相对端,为第一锁紧结构61和第二锁紧结构62保留安装空间。
63.如图4所示,限位组件56包括安装在第一轴承座54上的第一限位件561、设置在联动轴51上的限位槽562和第二限位件563;第一限位件561与限位槽562配合,第一限位件561在限位槽562内转动,以限位联动轴51。第二限位件563套设于联动轴51上,且与第二轴承座55抵接,避免联动轴51沿轴向方向移位。手柄57与联动轴51连接,通过手柄57可以简便地转动联动轴51。
64.具体地,如图3和图4所示,第一锁紧结构61包括第一锁紧座611和第一锁紧组件612;第一锁紧座611安装在联动安装座40上,与第一轴承座54相对,位于联动轴51下方;第
一锁紧组件612穿设于第一锁紧座611,且一端与联动轴51抵接,另一端用于与第一待锁结构抵接;具体地,第一锁紧组件612包括依次连接的第一连接件613、第一弹性件614和第一锁紧件615;具体地,第一连接件613伸出第一锁紧座611的一端与第一凸轮轴52抵接,第一锁紧件615伸出第一锁紧座611,当需要锁紧第一待锁结构时,使第一锁紧件615与第一待锁结构抵接。示例性地,当联动结构应用在用于介入手术机器人80的龙门架时,第一锁紧件615伸出第一锁紧座611,且穿设于床体对接结构30,当龙门架通过床体对接结构30与导管床体对接完成,则转动联动轴51,迫使第一锁紧件615与导管床体抵接,以将床体对接结构30锁紧到导管床体,此时,用于锁紧移动台车的第二锁紧结构62释放移动台车,将移动台车移走,以进行手术。
65.具体地,第二锁紧结构62包括第二锁紧座621和第二锁紧组件622;第二锁紧座621与第二轴承座55相对设置,位于联动轴51上方;第二锁紧组件622穿设于第二锁紧座621,且一端与第二凸轮轴53抵接,另一端用于与第二待锁结构抵接;具体地,第二锁紧组件622包括依次连接的第二连接件623、第二弹性件624和第二锁紧件625;具体地,第二连接件623伸出第二锁紧座621的一端与第二凸轮轴53抵接,第二锁紧件625伸出第二锁紧座621,当需要锁紧第二待锁结构时,使第二锁紧件625与第二待锁结构抵接。示例性地,当联动结构应用在用于介入手术机器人80的龙门架时,第二锁紧座621安装在支撑梁上,第二锁紧件625伸出第二锁紧座621,且穿设于台车对接结构20,当龙门架通过台车对接结构20与移动台车对接完成,则转动联动轴51,迫使第二锁紧件625与移动台车抵接,将台车对接结构20锁紧到移动台车,此时,用于锁紧导管床体的第一锁紧结构61释放导管床体,退出移动台车,以搬运安装有介入手术机器人80的龙门架离开导管床体。
66.作为一示例,当第一锁紧结构61和/或第二锁紧结构62未被锁紧时,使用者直接使用,可能导致意外情况。本实施例,联动结构还包括用于对第一锁紧结构61和/或第二锁紧结构62进行检测的检测结构70。检测结构70包括感应片71和与系统控制组件通信的感应器72,感应片71安装在联动轴51上,感应器72安装在第一轴承座54上,且联动轴51转动,感应片71随转动轴转动,当感应器72感应到感应片71,则第一锁紧结构61和/或第二锁紧结构62被锁紧,感应器72生成检测信号发送给系统控制组件,以便于系统控制组件通知使用者第一锁紧结构61和/或第二锁紧结构62已被锁紧,可以进行后续相应操作,保证安全性,避免意外情况。感应器72可以为关电感应器或者压力感应器等。
67.以上实施例仅表达了发明的一种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离发明构思的前提下,还可以做出若干变形和改进,这些都属于发明的保护范围。因此,发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。