1.本发明涉及一种医疗机器人领域装置,尤其涉及一种人性化移动台车。
背景技术:
2.现有利用血管介入手术机器人进行血管介入手术时,对于血管介入手术中医生需要长期接收x射线的辐射,容易对医生造成伤害,为此,开发了远程操作的主从式血管介入手术机器人。
3.当血管介入手术结束后,介入手术机器人需要从导管床搬运到移动台车,但是不同医院的导管床长度存在差异,目前的移动台车无法匹配不同长度的导管床,导致搬运过程存在较大困难。
技术实现要素:
4.基于此,有必要针对现有技术中的不足,提供一种新型的人性化移动台车。
5.一种人性化移动台车,包括车体和安装在所述车体上的悬臂对接组件;
6.所述悬臂对接组件用于与安装在导管床的介入手术机器人对接;
7.所述悬臂对接组件和所述车体形成用于容纳导管床的避让空间。
8.进一步地,所述车体包括底座和两个相对设置的支撑组件;
9.每一所述支撑组件的一端偏置于远离所述底座中心线的一侧、另一端与所述悬臂对接组件连接;所述悬臂对接组件朝所述底座的另一相对侧的方向设置而在所述底座与悬臂对接组件之间形成所述避让空间。
10.进一步地,每一所述支撑组件包括连接件和加强件;
11.所述连接件的一端与所述底座连接、另一端与所述悬臂对接组件连接;
12.所述加强件的一端连接于所述底座的两相对侧之间、另一端连接于所述连接件的中间。
13.进一步地,两个所述连接件的另一端之间设置固定梁。
14.进一步地,所述悬臂对接组件包括分别对应两个支撑组件的两个上悬臂和分别安装在两个上悬臂的两个台车对接件;
15.每一所述上悬臂的一端与相应支撑组件连接;
16.每一所述台车对接件安装在相应上悬臂的另一端,用于与介入手术机器人对接。
17.进一步地,两个所述上悬臂的另一端之间设置加强横梁。
18.进一步地,所述悬臂对接组件还包括滑动地设置地在所述台车对接件上的至少一个防撞组件和用于将所述防撞组件锁紧在所述台车对接件上的至少一个锁固组件。
19.进一步地,所述台车对接件设有与所述防撞组件配合的刻度尺,或所述上悬臂沿所述台车对接件延伸方向设有与所述防撞组件配合的刻度尺。
20.进一步地,所述人性化移动台车还包括与所述悬臂对接组件和/或所述车体连接的推动组件。
21.进一步地,所述推动组件包括靠近两个所述支撑组件的另一端分别延伸出的两个支撑板及设置于两个所述支撑板之间的推动手柄。
22.进一步地,两个支撑板朝远离所述悬臂对接组件的方向延伸。
23.进一步地,所述人性化移动台车还包括安装在所述底座上的滑轮组件和用于控制所述滑轮组件的刹车组件。
24.进一步地,两个所述支撑板于靠近推动手柄的位置分别开设导向槽,所述刹车组件包括穿设于两个所述导向槽之间的刹车控制件;
25.当推动所述刹车控制件从两个所述导向槽的一端移至另一端时,所述刹车控制件释放所述滑轮组件而让其滑动。
26.进一步地,所述推动手柄位于所述刹车控制件侧上方。
27.综上所述,本发明提供的人性化移动台车中,避让空间能够容纳不同长度的导管床,方便介入手术机器人的上床、下床,非常人性化,易于与不同长度的导管床适配,通用性强。
附图说明
28.图1为本发明一种人性化移动台车的一结构示意图。
29.图2为本发明一种人性化移动台车的另一结构示意图。
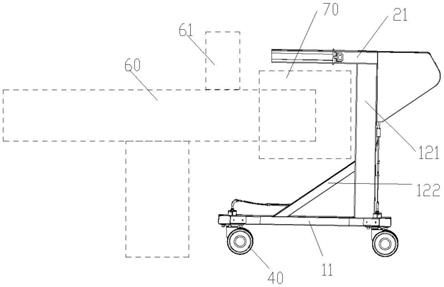
30.图3为本发明一种人性化移动台车的侧视图。
31.图中,10、车体;11、底座;12、支撑组件;121、连接件;122、加强件;13、固定梁;
32.20、悬臂对接组件;21、上悬臂;22、台车对接件;23、防撞组件;24、加强横梁;
33.30、推动组件;31、推动手柄;32、导向槽;33、支撑板;
34.40、滑轮组件;
35.50、刹车组件;51、刹车控制件;52、刹车连接件;
36.60、导管床;61、龙门架;
37.70、避让空间。
具体实施方式
38.为了使发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释发明,并不用于限定发明。
39.如图1至图3所示,本发明提供一种人性化移动台车,该人性化移动台车包括车体10、安装在车体10上的悬臂对接组件20、以及连接于悬臂对接组件20和/或车体10的推动组件30、安装在车体的滑轮组件40、用于控制滑轮组件40的刹车组件50;悬臂对接组件20用于与安装在导管床60的介入手术机器人(图中未示出)对接;悬臂对接组件20和车体10形成用于容纳导管床60床尾的避让空间70。
40.具体地,介入手术机器人通过龙门架61与导管床60和人性化移动台车滑动连接,龙门架61上设置有与悬臂对接组件20配合的第一对接结构(图中未示出)和与导管床60配合的第二对接结构(图中未示出)。当需要进行手术时,则龙门架61通过第二对接结构,将介入手术机器人安装在导管床60上;当手术完成,需要将介入手术机器人搬离时,则通过龙门
架60上的第一对接结构与人性化移动台车上的悬臂对接组件20配合,使介入手术机器人与人性化移动台车进行对接,以便于将介入手术机器人及龙门架61一起搬离导管床60。而不同医院由于实际手术需要,导管床60的长度存在差异。本实施例中,悬臂对接组件20和车体10形成避让空间70,避让空间70能够容纳不同长度的导管床60床尾,因此,本发明提供的人性化移动台车具有通用性,易于与不同长度的导管床60适配。
41.如图1所示,车体10包括底座11、两个相对设置的支撑组件12和用于连接两个支撑组件12的固定梁13;两支撑组件12分别对应两悬臂对接组件20;每一支撑组件12一端与底座11连接,另一端与悬臂对接组件20连接;底座11和悬臂对接组件20朝同一方向设置以形成避让空间70。每一支撑组件12包括竖直地偏置在远离底座11中心线的一侧与所述悬臂对接组件20之间的连接件121、分别与连接件121和底座11连接的加强件122,具体地,加强件122的一端连接于所述底座11的两相对侧之间、另一端连接于所述连接件121的中间;底座11、连接件121和加强件122呈三角形设置,因此,可以有效增强车体10的强度,为质量较大的介入手术机器人提供有力支撑。且固定梁13设置在两个支撑组件12对应的两个所述连接件121的另一端,起到加固的作用。
42.如图1所示,悬臂对接组件20包括分别对应两个支撑组件12的两个上悬臂21和安装在两个上悬臂21的两个台车对接件22;每一上悬臂21一端与相应支撑组件12连接;两个所述上悬臂21的另一端之间设置加强横梁24,起到加固的作用;台车对接件22安装在相应上悬臂21另一端,用于与支撑介入手术机器人的龙门架61的第一对接结构对接。因此,底座11、连接件121和上悬臂21围合形成凹形的避让空间70,以便于容纳不同长度的导管床60,匹配性较好。
43.进一步地,上悬臂21设有上滑槽(图中未示),上滑槽的延伸方向与台车对接件22延伸方向垂直,悬臂对接组件20还包括锁紧组件(图中未示);锁紧组件穿设于上滑槽,以使台车对接件22和上悬臂21滑动连接,因此,可根据实际需要,调节台车对接件22沿上滑槽移动,即台车对接件22可沿垂直于延伸方向的方向移动,示例性地,当地面不为水平面时,可以分别调节两个台车对接件22的位置,以确保两个台车对接件22处于同一水平线,便于对接。锁紧组件可以为螺栓等。
44.悬臂对接组件20还包括滑动地设置在台车对接件22上的至少一个防撞组件23和用于将防撞组件23锁紧在台车对接件22上的至少一个锁固组件(图中未示出)。防撞组件23滑动地设在台车对接件22上,以便于标识导管床60插入避让空间70的长度,提高对接效率。本实施例中,龙门架61设有与防撞组件23配合的碰珠组件,通常情况下,先确定导管床60插入避让空间70的长度,然后将防撞组件23移动至相应位置上,并采用锁固组件锁紧;在对接过程中,当防撞组件23与龙门架61的碰珠组件接触时,发出声响,提醒用户可以搬离龙门架和介入手术机器人,从而避免导管床60和一种人性化移动台车发生碰撞。锁固组件可以为螺钉等,在此不做限定。进一步地,台车对接件22设有与所述防撞组件23配合的刻度尺(图中未示出),或所述上悬臂21沿所述台车对接件22延伸方向设有与所述防撞组件23配合的刻度尺,以方便医护人员根据导管床60的长度来调节防撞组件23在台车对接件22上的精确位置,方便、安全地实现介入手术机器人的上床、下床。
45.如图1和图2所示,本发明的人性化移动台车还包括安装在底座11上的滑轮组件40和用于控制滑轮组件40的刹车组件50。刹车组件50包括安装在推动组件30的刹车控制件51
和刹车连接件52;刹车连接件52一端与滑轮组件40连接,另一端与刹车控制件51连接。推动组件30包括靠近两个所述支撑组件12的另一端分别延伸出的两个支撑板33及设置于两个所述支撑板33之间的推动手柄31,推动手柄31位于刹车控制件51侧上方,以便于医护人员同时手握推动手柄31和刹车控制件51。本实施例中,两个所述支撑板33朝远离所述悬臂对接组件20的方向延伸,即与两个所述上悬臂21的延伸方向相反的方向延伸。具体地,推动组件30上设有供刹车控制件51穿设的导向槽32;通常情况下,刹车控制件51位于导向槽32的一端,此时,滑轮组件40被锁紧,不可滑动;当龙门架61和介入手术机器人移动到一种人性化移动台车上时,则医护人员可以握紧刹车控制件51,以使刹车控制件51向导向槽32的另一端移动,拉动刹车连接件121,释放滑轮组件40,此时,滑轮组件40可以滑动,以便于医护人员移动人性化移动台车,让龙门架61和介入手术机器人离开导管床60。
46.以上实施例仅表达了发明的一种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离发明构思的前提下,还可以做出若干变形和改进,这些都属于发明的保护范围。因此,发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
