1.本发明涉及多普勒差分干涉光谱技术,具体涉及挠性玻璃质支撑元件、多普勒差分干涉仪及制备方法。
背景技术:
2.多普勒差分干涉光谱技术是一种新型的大气风场探测技术,与迈克尔逊干涉技术和法布里-珀罗干涉技术相比,其构造系统中无运动部件、结构紧凑,且具有较高的光谱分辨率、高通量、高稳定性等优点,特别适用于星载观测平台。多普勒差分干涉仪通过观测大气成分中的精细光谱谱线进而通过多普勒频移来反演大气运动速度,其工作原理如图1所示,用两块位置固定且与光轴成一定角度的衍射光栅代替了迈克尔逊干涉仪两臂中的平面反射镜。多普勒差分干涉仪的两臂存在一个非对称量,通过引入基础光程差来提高干涉仪图的相位灵敏度,光线经准直后进入光学系统,被分光棱镜分为两束能量相等的相干光,两束光经光栅衍射后返回,最后经成像镜头等比例缩放后形成干涉图由探测器接收。
3.整体式多普勒差分干涉仪采用全胶合一体化的方法,各光学元件通过支撑元件粘接为一个整体,并要同时满足干涉仪所需的胶合精度、各光学元件间低热传导和粘接强度良好的要求。整体式多普勒差分干涉仪经光学设计后,由于光学元件间的材料膨胀系数差异较大,并且干涉仪的两臂不对称,整体式多普勒差分干涉仪对温度变化极为敏感,温度波动会引起光学元件热膨胀和热应力,易导致干涉仪的光学面面型变差和两臂基础光程差发生变化,引起干涉图相位发生漂移,最终使相位反演精度降低。
技术实现要素:
4.本发明的目的是解决现有整体式多普勒差分干涉仪因温度变化而导致干涉仪的光学面面型变差和两臂基础光程差发生变化的技术问题,而提供挠性玻璃质支撑元件、多普勒差分干涉仪及制备方法。本发明可以实现多普勒差分干涉仪良好的热稳定性。
5.本发明的技术方案是:
6.一种挠性玻璃质支撑元件,其特殊之处在于:包括首尾相连的四个支撑架,所述四个支撑架组成一体式矩形中空框架结构,每个支撑架均由多个粘接块以及连接相邻粘接块的挠性连接块组成;所述粘接块的厚度比与之相连的挠性连接块的厚度大,且上下两个端面均超出挠性连接块的端面;四个支撑架所有粘接块的上下两个端面分别构成上下两个粘接面;所述两个粘接面为平行面或非平行面。
7.进一步地,所述挠性连接块均位于所述粘接块的内侧。
8.进一步地,所述挠性连接块为u形结构或弧形结构,所述u形结构或弧形结构的两个端部分别连接相邻两个粘接块。
9.进一步地,四个支撑架的粘接块等距分布,相邻粘接块的距离与u形结构或弧形结构的开口宽度一致。
10.一种多普勒差分干涉仪,包括分光棱镜、短臂衍射光栅和长臂衍射光栅;
11.短臂衍射光栅包括依次连接在分光棱镜反射表面上的短臂视场支撑元件、短臂视场棱镜、短臂光栅支撑元件和短臂光栅;
12.长臂衍射光栅包括依次连接在分光棱镜透射表面上的长臂视场支撑元件、长臂视场棱镜、长臂光栅支撑元件和长臂光栅;
13.其特殊之处在于:
14.所述短臂视场支撑元件、短臂光栅支撑元件、长臂视场支撑元件和长臂光栅支撑元件均采用前面所述的挠性玻璃质支撑元件;所述短臂视场支撑元件和长臂视场支撑元件的两个粘接面均为非平行面且设定有相同的夹角;所述短臂光栅支撑元件和长臂光栅支撑元件的两个粘接面均为平行面。
15.进一步地,所述短臂视场支撑元件两个粘接面的夹角和长臂视场支撑元件两个粘接面的夹角均为4
°
17
′
42
″±
10
″
。
16.一种前面所述的多普勒差分干涉仪的制备方法,其特殊之处在于,包括以下步骤:
17.步骤1)确定光学参数;
18.通过光学设计,确定分光棱镜、短臂视场棱镜、短臂光栅、长臂视场棱镜、长臂光栅的尺寸和材料;确定各光学元件间的角度、距离和通光口径;
19.步骤2)确定各挠性玻璃质支撑元件的材料和尺寸;
20.步骤2.1)根据步骤1)中的光学参数,选择短臂光栅支撑元件和长臂光栅支撑元件的材料和厚度;
21.步骤2.2)选择短臂视场支撑元件和长臂视场支撑元件的中心厚度和材料,选择条件满足如下光学表达式:
[0022][0023]
其中
[0024]
δopd=2(δd1n1 δd2n2)
[0025]
n1是littrow波数δ
l
的光谱在真空折射率n1=1;
[0026]
n2是littrow波数δ
l
的光谱在视场棱镜的折射率;
[0027]
α1是长臂视场支撑元件材料的热膨胀系数;
[0028]
α
′1是短臂视场支撑元件材料的热膨胀系数;
[0029]
α2是视场棱镜材料的热膨胀系数;
[0030]
d1是长臂视场支撑元件的中心厚度;
[0031]
δd1是短臂视场支撑元件中心厚度相对长臂视场支撑元件中心厚度增加的厚度;
[0032]
δd2是长臂视场棱镜中心厚度相对短臂视场棱镜中心厚度增加的厚度;
[0033]
t是光学元件的温度;
[0034]
根据光学表达式,选择长臂视场支撑元件的材料,确定α1值,选择长臂视场支撑元件的中心厚度,确定d1值;
[0035]
根据光学表达式,选择α
′1和δd1值,确定短臂视场支撑元件的材料和中心厚度;
[0036]
步骤2.3)对挠性玻璃质支撑元件的截面尺寸进行优化;
[0037]
通过有限元分析,在温度变化1℃时,热变形分析后计算各光学工作面的面型pv
值,使多普勒差分干涉仪各光学面的面型pv值小于(λ为干涉仪的littrow波长),得到挠性玻璃质支撑元件的截面尺寸如下:
[0038]
四个挠性玻璃质支撑元件的一体式矩形中空框架结构截面尺寸一致;
[0039]
所述短臂光栅支撑元件和长臂光栅支撑元件的厚度一致,且两个粘接面均为与光轴垂直的平面;
[0040]
所述短臂视场支撑元件的两粘接面具有一夹角a,其中一面与反射光轴垂直;
[0041]
所述长臂视场支撑元件的两粘接面具有一夹角b,其中一面与透射光轴垂直;
[0042]
步骤3)加工得到挠性玻璃质支撑元件;
[0043]
步骤3.1)根据步骤2.3)的截面尺寸加工出四个矩形中空框架支撑元件轮廓,分别对应短臂视场支撑元件、短臂光栅支撑元件、长臂视场支撑元件以及长臂光栅支撑元件;
[0044]
步骤3.2)将四个矩形中空框架挠性玻璃质支撑元件轮廓进行切割加工;
[0045]
将挠性玻璃质支撑元件切割加工为一体式矩形中空框架结构,使每个边均由多个粘接块以及连接相邻粘接块的挠性连接块组成;
[0046]
步骤3.3)将挠性连接块与粘接面同侧的两个端面铣低;
[0047]
步骤4)将各光学元件之间通过挠性玻璃质支撑元件粘接成一体;
[0048]
将短臂视场支撑元件、短臂视场棱镜、短臂光栅支撑元件和短臂光栅依次连接在分光棱镜的反射表面上;
[0049]
将长臂视场支撑元件、长臂视场棱镜、长臂光栅支撑元件和长臂光栅依次连接在分光棱镜的透射表面上。
[0050]
进一步地,步骤3.3)中,将挠性连接块与粘接面同侧的两个端面均铣低0.1mm,使两个粘接面均高于挠性连接块两个端面。
[0051]
进一步地,步骤1)中,所述分光棱镜、短臂光栅和长臂光栅材料均为jgs1,短臂视场棱镜和长臂视场棱镜材料均为n-sf57;
[0052]
所述jgs1和n-sf57的热膨胀系数分别为0.5
×
10-6
和8.5
×
10-6
;
[0053]
步骤2.1)中,选择所述短臂光栅支撑元件和长臂光栅支撑元件的尺寸和材料一致,厚度d3均为6mm,材料均jgs1;
[0054]
步骤2.2)中,选择所述长臂视场支撑元件材料为jgs1,中心厚度d1为5mm;
[0055]
选择所述短臂视场支撑元件的材料为caf2,中心厚度为13.48mm。
[0056]
进一步地,步骤2.3)中,对挠性玻璃质支撑元件的截面优化尺寸如下:
[0057]
所述矩形中空框架的截面尺寸为60
×
50mm;
[0058]
所述短臂光栅支撑元件(4)和长臂光栅支撑元件(8)的厚度一致,厚度均为6
±
0.01mm,且粘接面均为与光轴垂直的平面;
[0059]
所述短臂视场支撑元件(2)的两粘接面的夹角a为4
°
17
′
42
″±
10
″
,其中一面与反射光轴垂直;短臂视场棱镜支撑元件的厚端高为7.25
±
0.01mm;
[0060]
所述长臂视场支撑元件(6)的两粘接面的夹角b为4
°
17
′
42
″±
10
″
,其中一面为与透射光轴垂直;长臂视场棱镜支撑元件的厚端高为15.73
±
0.01mm。
[0061]
本发明的有益效果:
[0062]
1、本发明中挠性玻璃质支撑元件可使光学元件间的面变形发生在挠性玻璃质支
撑元件上,减小光学面的变形。
[0063]
2、本发明中多普勒差分干涉仪采用本发明的挠性玻璃质支撑元件,解决了多普勒差分干涉仪中两个光学元件材料热膨胀系数差异大,易随温度变化而导致干涉仪的光学面面型变差和两臂基础光程差发生变化的技术问题。
[0064]
3、本发明中挠性玻璃质支撑元件材料和厚度的合理选择可保证干涉仪热膨胀变形时两臂的基础光程差不变,为整体式多普勒差分干涉仪提供稳定的初始相位。
[0065]
4、本发明中挠性玻璃质支撑元件即减小了光学元件间的热传导,又具有良好的粘接强度,可满足多普勒差分干涉仪的航天应用要求。
[0066]
5、本发明中挠性玻璃质支撑元件采用一体化加工,粘接面间具有很好的平面度,并且两个端面具有很好的角度和厚度精度,保证其所粘接的光学元件间的角度和距离精度要求。
[0067]
6、本发明中多普勒差分干涉仪采用本发明的挠性玻璃质支撑元件,使多普勒差分干涉仪胶合精度高、热稳定性好。
[0068]
7、本发明中制备方法具有工艺简单、胶合精度高,得到的多普勒差分干涉仪精度稳定、可靠性高,可适用于不同探测波长的多普勒差分干涉仪制备。
附图说明
[0069]
图1为现有多普勒差分干涉仪原理图;
[0070]
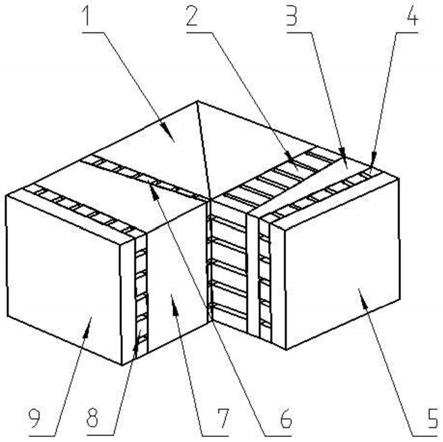
图2为本发明实施例的结构示意图;
[0071]
图3为图2实施例中挠性玻璃质支撑元件结构示意图;
[0072]
图4为图2实施例的光路轨迹图;
[0073]
图5为图2实施例中短臂视场支撑元件结构示意图;
[0074]
图6为图2实施例中长臂视场支撑元件结构示意图;
[0075]
图7为图2实施例中光栅挠性玻璃质支撑元件结构示意图。
[0076]
附图标记说明:
[0077]
1-分光棱镜,2-短臂视场支撑元件,3-短臂视场棱镜,4-短臂光栅支撑元件,5-短臂光栅,6-长臂视场支撑元件,7-长臂视场棱镜,8-长臂光栅支撑元件,9-长臂光栅。
具体实施方式
[0078]
下面结合附图和具体实施例对本发明作进一步地说明。
[0079]
如图2所述,本发明一种多普勒差分干涉仪,通过挠性玻璃质支撑元件将各光学元件粘接起来,形成整体式多普勒差分干涉仪。本发明一种多普勒差分干涉仪包括分光棱镜1、短臂衍射光栅和长臂衍射光栅;短臂衍射光栅包括依次连接在分光棱镜1反射表面上的短臂视场支撑元件2、短臂视场棱镜3、短臂光栅支撑元件4和短臂光栅5;长臂衍射光栅包括依次连接在分光棱镜1透射表面上的长臂视场支撑元件6、长臂视场棱镜7、长臂光栅支撑元件8和长臂光栅9。其中,短臂视场支撑元件2、短臂光栅支撑元件4、长臂视场支撑元件6和长臂光栅支撑元件8均为挠性玻璃质支撑元件;短臂视场支撑元件2和长臂视场支撑元件6的两个粘接面均为非平行面且设定有相同的夹角;短臂光栅支撑元件4和长臂光栅支撑元件8的两个粘接面均为平行面。
[0080]
如图3所示,挠性玻璃质支撑元件包括首尾相连的四个支撑架,四个支撑架组成截面为矩形的一体式矩形中空框架结构,其每个支撑架均由多个粘接块以及连接相邻粘接块的挠性连接块组成;粘接块的厚度比与之相连的挠性连接块的厚度大,且上下两个端面均超出挠性连接块的端面;四个支撑架所有粘接块的的上下两个端面分别构成两个粘接面;两个粘接面为平行面或非平行面。一体式矩形中空框架结构的最外围一圈为粘接块,挠性连接块均位于粘接块的内侧。两个粘接面用来粘接光学元件。挠性连接块为u形结构或弧形结构,本实施例中挠性连接块为u形块,u形块的两个端部分别与相邻两个粘接块连接;四个支撑架的粘接块等距分布,相邻粘接块的距离与u形块开口宽度一致。
[0081]
独立的粘接块的上下两个端面要实现共面比较困难,尤其是支撑元件两端粘接面存在夹角时,间隔元件间的位置变化会严重影响组成粘接面的平面度。u形块将每个粘接块连城一个整体,可以保证粘接块之间的位置保持不变,即可保证挠性玻璃质支撑元件粘接面的平面度。
[0082]
粘接块的上下两个端面均高于挠性连接块的两个端面,使u形块不与光学元件粘接,粘接块的上下两个端面分别成为一个个独立的端面,可避免给粘接块两端粘接面点胶时u形块上有胶溢出,且使挠性玻璃质支撑元件两端粘接面之间形成一定的空间,既可以防尘又具有出气功能,从而可保持被粘接光学面的清洁,并可在真空环境下使用。
[0083]
挠性玻璃质支撑元件是由矩形中空框架支撑元件切割得到的,先根据光学元件间的角度、距离和通光口径加工出一体式矩形中空框架支撑元件,再将支撑元件切割出如图3所示的轮廓后,再将u形块的两个端面铣低0.1mm,加工得到挠性玻璃质支撑元件。挠性玻璃质支撑元件的粘接块的上下端形成挠性玻璃质支撑元件的粘接面,粘接面具有良好的平面度,并且前后粘接面具有良好的角度和位置精度。
[0084]
挠性玻璃质支撑元件每个独立的小块粘接面之间的相对位置会随着被粘接光学件的热膨胀而变化,相对于原先的矩形中空框架支撑元件对被粘接光学面的约束减小,将变形转移到u形块上,可显著减小光学面膨胀带来的面型变化。挠性玻璃质支撑元件两端粘接的光学元件热膨胀差异大,由于挠性玻璃质支撑元件比矩形中空框架支撑元件的刚度小,使变形发生在挠性玻璃质支撑元件上,可减小光学元件材料热膨胀系数差异对多普勒差分干涉仪的影响。
[0085]
制备多普勒差分干涉仪时,挠性玻璃质支撑元件厚度和材料的选择要满足温度变化时多普勒差分干涉仪的基础光程差不变。以下是本发明一种多普勒差分干涉仪的制备方法:
[0086]
步骤1)确定光学参数;
[0087]
轴上光线以θ
l
角入射到光栅上,将有某一波数的光谱以原光路返回,即该光谱衍射角与入射角相等均为θ
l
,称该光谱波数δ
l
为系统的littrow波数,θ
l
角为littrow角。在多普勒差分干涉仪中,littrow波数δ
l
的光谱以θ
l
角入射到光栅以原路返回,光路轨迹如图4所示,轴上光线经过分光面后分成两束光,短臂光线经过d0、d1 δd1、d2和d3到达光栅并原路返回,长臂光线经过d0、d1、d2 δd2和d3到达光栅并原路返回。d0表示主光线经过分光面后,在分光棱镜中走过的长度。d1表示主光线从分光棱镜面出射到长臂视场棱镜入射所走过的长度。d1 δd1表示主光线从分光棱镜面出射到短臂视场棱镜入射所走过的长度,分光棱镜与短臂视场棱镜间的虚线表示长臂视场棱镜入射面相对于分光棱镜出射面的位置,主光线从
分光棱镜面出射到虚线所走过的长度为d1,再经过长度δd1后到达短臂视场棱镜入射面。d2表示主光线从短臂视场棱镜入射面到出射面所走过的长度。d2 δd2表示主光线从长臂视场棱镜入射面到出射面所走过的长度,长臂视场棱镜中的虚线表示短臂视场棱镜出射面相对于入射面的位置,主光线从长臂视场棱镜入射面到到虚线所走过的长度为d2,再经过长度δd2后到达长臂视场棱镜出射面。d3表示主光线从长短臂视场棱镜出射面到光栅面所走过的长度,且长臂中和短臂中所走过的长度一样。
[0088]
通过光学设计,确定分光棱镜1、短臂视场棱镜3、短臂光栅5、长臂视场棱镜7、长臂光栅9的尺寸和材料;确定各光学元件间的角度、距离和通光口径。
[0089]
本实施例中,分光棱镜1、短臂光栅5和长臂光栅9的材料均为jgs1,短臂视场棱镜3和长臂视场棱镜7的材料均为n-sf57;jgs1和n-sf57的热膨胀系数分别为0.5
×
10-6
和8.5
×
10-6
。
[0090]
步骤2)确定各挠性玻璃质支撑元件的材料和尺寸;
[0091]
步骤2.1)根据步骤1)中的光学参数,选择短臂光栅支撑元件4和长臂光栅支撑元件8的材料和厚度;
[0092]
本实施例中通过光学设计确定短臂光栅支撑元件和长臂光栅支撑元件的尺寸和材料一致,厚度d3均为6mm,材料均为jgs1。
[0093]
步骤2.2)选择短臂视场支撑元件2和长臂视场支撑元件6的中心厚度和材料,选择条件满足如下光学表达式:
[0094][0095]
其中
[0096]
δopd=2(δd1n1 δd2n2)
[0097]
n1是littrow波数δ
l
的光谱在真空折射率n1=1;
[0098]
n2是littrow波数δ
l
的光谱在视场棱镜的折射率;
[0099]
α1是长臂视场支撑元件材料的热膨胀系数;
[0100]
α
′1是短臂视场支撑元件材料的热膨胀系数;
[0101]
α2是视场棱镜材料的热膨胀系数;
[0102]
d1是长臂视场支撑元件的中心厚度;
[0103]
δd1是短臂视场支撑元件中心厚度相对长臂视场支撑元件中心厚度增加的厚度;
[0104]
δd2是长臂视场棱镜中心厚度相对短臂视场棱镜中心厚度增加的厚度;
[0105]
t是光学元件的温度;
[0106]
根据光学表达式,选择长臂视场支撑元件6的材料,确定α1值,选择长臂视场支撑元件6的中心厚度,确定d1值;
[0107]
根据光学表达式,选择α
′1和δd1值,确定短臂视场支撑元件2的材料和中心厚度。
[0108]
本实施例中长臂视场支撑元件材料为jgs1,中心厚度d1为5mm;短臂视场支撑元件的材料为caf2,中心厚度为13.48mm。
[0109]
光学设计时已经确定了视场棱镜的尺寸和材料,所以是已知项,选择长臂视场支撑元件与分光棱镜的材料一致,即α1已知。选择长臂视场支撑元件的中
心厚度d1=5mm,根据光学表达式选择合适的α
′1和δd1,最终确定短臂视场支撑元件的材料为caf2,中心厚度为13.48mm。
[0110]
步骤2.3)对挠性玻璃质支撑元件的截面尺寸进行优化;
[0111]
确定完挠性玻璃质支撑元件的厚度和材料后对截面尺寸进行优化,使挠性玻璃质支撑元件即减小光学元件的面型变化和光学元件间的热传导,又可以满足一定力学条件的粘接强度的要求。
[0112]
通过有限元分析,在温度变化1℃时,热变形分析后计算各光学工作面的面型pv值,使多普勒差分干涉仪各光学面的面型pv值小于(λ为干涉仪的littrow波长),优化得到挠性玻璃质支撑元件长
×
短边的切割块数增加到7
×
6块可满足面型要求,得到的粘接面减小到矩形中空框架形粘接面的40%。经有限元分析计算7g2/hz的随机振动载荷下,挠性玻璃质支撑元件粘接面的应力都小于0.5mpa,远小于粘接胶的抗拉强度和抗剪强度,优化后得到挠性玻璃质支撑元件的精确截面尺寸。本实施例中截面尺寸如下:
[0113]
四个挠性玻璃质支撑元件的一体式矩形中空框架结构的截面尺寸均为60
×
50mm。短臂光栅支撑元件4和长臂光栅支撑元件8的厚度一致,厚度均为6
±
0.01mm,且两粘接面均为与光轴垂直的平面。短臂视场支撑元件2的两粘接面具有一夹角a为4
°
17
′
42
″±
10
″
,其中一面与反射光轴垂直,短臂视场棱镜支撑元件的厚端高为7.25
±
0.01mm。长臂视场支撑元件6的两粘接面具有一夹角b为4
°
17
′
42
″±
10
″
,其中一面为与透射光轴垂直,长臂视场棱镜支撑元件的厚端高为15.73
±
0.01mm。
[0114]
步骤3)加工得到挠性玻璃质支撑元件;
[0115]
步骤3.1)根据步骤2.3)中得到的截面尺寸加工出四个矩形中空框架支撑元件轮廓,分别对应短臂视场支撑元件2、短臂光栅支撑元件4、长臂视场支撑元件6以及长臂光栅支撑元件8。
[0116]
步骤3.2)将四个矩形中空框架挠性玻璃质支撑元件轮廓进行切割加工;
[0117]
将挠性玻璃质支撑元件切割加工为一体式矩形中空框架结构,使一体式矩形中空框架结构的每个边均由多个矩形粘接块以及连接相邻粘接块的挠性连接块组成。挠性连接块为u形块,u形块均位于一体式矩形中空框架的内侧;粘接块均位于一体式矩形中空框架的外侧;粘接块与u形块的凸耳连接;一体式矩形中空框架边部的粘接块等距分布,相邻粘接块的距离与u形块开口宽度一致;u形块的切缝宽度为2mm,凸耳宽度为2mm,开口宽度为2mm;粘接块的宽度为3mm,长度大于6mm。
[0118]
步骤3.3)将u形块与连接面同侧的两个端面铣低;
[0119]
将步骤3.2)切割加工好的u形块中与粘接面同侧的两个端面均铣低0.1mm,使粘接块的上下端面均高于u形块与粘接面同侧的两个端面。
[0120]
步骤4)将各光学元件之间通过挠性玻璃质支撑元件粘接成一体;
[0121]
将短臂视场支撑元件2、短臂视场棱镜3、短臂光栅支撑元件4和短臂光栅5依次连接在分光棱镜1的反射表面上;将长臂视场支撑元件6、长臂视场棱镜7、长臂光栅支撑元件8和长臂光栅9依次连接在分光棱镜1的透射表面上。
[0122]
设计得到的短臂视场支撑元件2如图5所示、长臂视场支撑元件6如图6所示,长臂和短臂光栅挠性玻璃质支撑元件如图7所示。通过挠性玻璃质支撑元件的厚度和前后面的
夹角来保证光学元件间的距离和角度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。