技术特征:
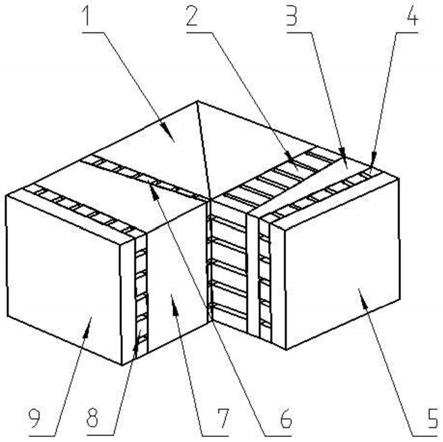
1.一种挠性玻璃质支撑元件,其特征在于:包括首尾相连的四个支撑架,所述四个支撑架组成一体式矩形中空框架结构,每个支撑架均由多个粘接块以及连接相邻粘接块的挠性连接块组成;所述粘接块的厚度比与之相连的挠性连接块的厚度大,且上下两个端面均超出挠性连接块的端面;四个支撑架所有粘接块的上下两个端面分别构成上下两个粘接面;所述两个粘接面为平行面或非平行面。2.根据权利要求1所述的一种挠性玻璃质支撑元件,其特征在于:所述挠性连接块均位于所述粘接块的内侧。3.根据权利要求1或2所述的一种挠性玻璃质支撑元件,其特征在于:所述挠性连接块为u形结构或弧形结构,所述u形结构或弧形结构的两个端部分别连接相邻两个粘接块。4.根据权利要求3所述的一种挠性玻璃质支撑元件,其特征在于:四个支撑架的粘接块等距分布,相邻粘接块的距离与u形结构或弧形结构的开口宽度一致。5.一种多普勒差分干涉仪,包括分光棱镜(1)、短臂衍射光栅和长臂衍射光栅;短臂衍射光栅包括依次连接在分光棱镜(1)反射表面上的短臂视场支撑元件(2)、短臂视场棱镜(3)、短臂光栅支撑元件(4)和短臂光栅(5);长臂衍射光栅包括依次连接在分光棱镜(1)透射表面上的长臂视场支撑元件(6)、长臂视场棱镜(7)、长臂光栅支撑元件(8)和长臂光栅(9);其特征在于:所述短臂视场支撑元件(2)、短臂光栅支撑元件(4)、长臂视场支撑元件(6)和长臂光栅支撑元件(8)均采用权利要求1-4任一所述的挠性玻璃质支撑元件;所述短臂视场支撑元件(2)和长臂视场支撑元件(6)的两个粘接面均为非平行面且设定有相同的夹角;所述短臂光栅支撑元件(4)和长臂光栅支撑元件(8)的两个粘接面均为平行面。6.根据权利要求5所述的一种多普勒差分干涉仪,其特征在于:所述短臂视场支撑元件(2)两个粘接面的夹角和长臂视场支撑元件(6)两个粘接面的夹角均为4
°
17
′
42
″±
10
″
。7.一种权利要求5或6所述的多普勒差分干涉仪的制备方法,其特征在于,包括以下步骤:步骤1)确定光学参数;通过光学设计,确定分光棱镜(1)、短臂视场棱镜(3)、短臂光栅(5)、长臂视场棱镜(7)、长臂光栅(9)的尺寸和材料;确定各光学元件间的角度、距离和通光口径;步骤2)确定各挠性玻璃质支撑元件的材料和尺寸;步骤2.1)根据步骤1)中的光学参数,选择短臂光栅支撑元件(4)和长臂光栅支撑元件(8)的材料和厚度;步骤2.2)选择短臂视场支撑元件(2)和长臂视场支撑元件(6)的中心厚度和材料,选择条件满足如下光学表达式:其中
δopd=2(δd1n1 δd2n2)n1是littrow波数δ
l
的光谱在真空折射率n1=1;n2是littrow波数δ
l
的光谱在视场棱镜的折射率;α1是长臂视场支撑元件材料的热膨胀系数;α
′1是短臂视场支撑元件材料的热膨胀系数;α2是视场棱镜材料的热膨胀系数;d1是长臂视场支撑元件的中心厚度;δd1是短臂视场支撑元件中心厚度相对长臂视场支撑元件中心厚度增加的厚度;δd2是长臂视场棱镜中心厚度相对短臂视场棱镜中心厚度增加的厚度;t是光学元件的温度;根据光学表达式,选择长臂视场支撑元件(6)的材料,确定α1值,选择长臂视场支撑元件(6)的中心厚度,确定d1值;根据光学表达式,选择α
′1和δd1值,确定短臂视场支撑元件(2)的材料和中心厚度;步骤2.3)对挠性玻璃质支撑元件的截面尺寸进行优化;通过有限元分析,在温度变化1℃时,热变形分析后计算各光学工作面的面型pv值,使多普勒差分干涉仪各光学面的面型pv值小于(λ为干涉仪的littrow波长),得到挠性玻璃质支撑元件的截面尺寸如下:四个挠性玻璃质支撑元件的一体式矩形中空框架结构截面尺寸一致;所述短臂光栅支撑元件(4)和长臂光栅支撑元件(8)的厚度一致,且两个粘接面均为与光轴垂直的平面;所述短臂视场支撑元件(2)的两粘接面具有一夹角a,其中一面与反射光轴垂直;所述长臂视场支撑元件(6)的两粘接面具有一夹角b,其中一面与透射光轴垂直;步骤3)加工得到挠性玻璃质支撑元件;步骤3.1)根据步骤2.3)的截面尺寸加工出四个矩形中空框架支撑元件轮廓,分别对应短臂视场支撑元件(2)、短臂光栅支撑元件(4)、长臂视场支撑元件(6)以及长臂光栅支撑元件(8);步骤3.2)将四个矩形中空框架挠性玻璃质支撑元件轮廓进行切割加工;将挠性玻璃质支撑元件切割加工为一体式矩形中空框架结构,使每个边均由多个粘接块以及连接相邻粘接块的挠性连接块组成;步骤3.3)将挠性连接块与粘接面同侧的两个端面铣低;步骤4)将各光学元件之间通过挠性玻璃质支撑元件粘接成一体;将短臂视场支撑元件(2)、短臂视场棱镜(3)、短臂光栅支撑元件(4)和短臂光栅(5)依次连接在分光棱镜(1)的反射表面上;将长臂视场支撑元件(6)、长臂视场棱镜(7)、长臂光栅支撑元件(8)和长臂光栅(9)依次连接在分光棱镜(1)的透射表面上。8.根据权利要求7所述的一种多普勒差分干涉仪的制备方法,其特征在于:步骤3.3)中,将挠性连接块与粘接面同侧的两个端面均铣低0.1mm,使两个粘接面均高于挠性连接块两个端面。
9.根据权利要求7所述的一种多普勒差分干涉仪的制备方法,其特征在于:步骤1)中,所述分光棱镜、短臂光栅和长臂光栅材料均为jgs1,短臂视场棱镜和长臂视场棱镜材料均为n-sf57;所述jgs1和n-sf57的热膨胀系数分别为0.5
×
10-6
和8.5
×
10-6
;步骤2.1)中,选择所述短臂光栅支撑元件和长臂光栅支撑元件的尺寸和材料一致,厚度d3均为6mm,材料均jgs1;步骤2.2)中,选择所述长臂视场支撑元件材料为jgs1,中心厚度d1为5mm;选择所述短臂视场支撑元件的材料为caf2,中心厚度为13.48mm。10.根据权利要求7所述的一种多普勒差分干涉仪的制备方法,其特征在于:步骤2.3)中,对挠性玻璃质支撑元件的截面优化尺寸如下:所述矩形中空框架的截面尺寸为60
×
50mm;所述短臂光栅支撑元件(4)和长臂光栅支撑元件(8)的厚度一致,厚度均为6
±
0.01mm,且粘接面均为与光轴垂直的平面;所述短臂视场支撑元件(2)的两粘接面的夹角a为4
°
17
′
42
″±
10
″
,其中一面与反射光轴垂直;短臂视场棱镜支撑元件的厚端高为7.25
±
0.01mm;所述长臂视场支撑元件(6)的两粘接面的夹角b为4
°
17
′
42
″±
10
″
,其中一面为与透射光轴垂直;长臂视场棱镜支撑元件的厚端高为15.73
±
0.01mm。
技术总结
本发明涉及多普勒差分干涉光谱技术,具体涉及挠性玻璃质支撑元件、多普勒差分干涉仪及制备方法。解决了多普勒差分干涉仪因温度变化而导致干涉仪的光学面面型变差和两臂基础光程差发生变化的技术问题。本发明包括分光棱镜、短臂视场支撑元件、短臂视场棱镜、短臂光栅支撑元件、短臂光栅、长臂视场支撑元件、长臂视场棱镜、长臂光栅支撑元件和长臂光栅;短臂视场支撑元件、短臂光栅支撑元件、长臂视场支撑元件和长臂光栅支撑元件均为挠性玻璃质支撑元件;挠性玻璃质支撑元件为一体式矩形中空框架结构,其每个边均由多个粘接块以及连接相邻粘接块的挠性连接块组成。本发明还提供了多普勒差分干涉仪的制备方法。勒差分干涉仪的制备方法。勒差分干涉仪的制备方法。
技术研发人员:畅晨光 冯玉涛 孙剑 李娟 赵珩翔 傅頔
受保护的技术使用者:中国科学院西安光学精密机械研究所
技术研发日:2021.11.18
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。