1.本发明涉及医疗器械控制技术领域,更具体的说是涉及一种呼吸机比例阀的高精度控制系统和方法。
背景技术:
2.呼吸机是一种能够代替、控制或者改变人的正常生理呼吸的医疗设备,可以帮助患者增加肺通气量,改善患者的呼吸功能。其在临床急救、治疗、复苏呼吸障碍患者等方面具有广泛的应用。
3.目前,我国大约有5000万左右的呼吸功能障碍患者,呼吸机的市场需求量极大。但由于我国无创呼吸产业起步较晚,在呼吸机的核心零部件方面缺乏关键的技术,严重依赖进口,这极大地影响了我国呼吸机产业的发展。而作为呼吸机的关键基础零件的比例阀,在比例阀的控制系统中,实现比例阀的阀芯位置的精准控制进而实现比例阀输出流量和压力的高精度调节是其重要的研究方向。
4.因此,如何提供一种呼吸机比例阀的高精度控制系统和方法是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种呼吸机比例阀的高精度控制系统和方法,消除了电流“死区“以及系统装置之间摩擦等非线性因素的影响,提高了对阀芯位置的控制精度,进而实现比例阀输出流量和压力的高精度调节。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种呼吸机比例阀的高精度控制系统,包括:前馈控制器和闭环pid控制系统,所述闭环pid控制系统包括位置pid控制器和电流pid控制器;
8.所述前馈控制器用于基于神经网络模型对偏差信号进行处理,得到阀芯线圈补偿电流;
9.所述位置pid控制器用于对指令信号和阀芯位移实验值的差值进行处理,输出阀芯线圈驱动电流;
10.所述电流pid控制器以所述阀芯线圈补偿电流和所述阀芯线圈驱动电流叠加后与比例阀线圈电流实验值的差值作为输入,输出阀芯线圈实际驱动电流。
11.优选的,所述位置pid控制器通过以下步骤得到:
12.获取比例阀的相关实验数据:测试不同压力下,比例阀线圈电流实验值及其所对应的阀芯位移实验值,得到比例阀线圈电流实验值与阀芯位移实验值之间的关系,同时测量出阀芯线圈初始驱动电流;
13.将所述阀芯位移实验值转化为电压信号后,与控制阀指令信号的差值作为位置pid控制器的输入,通过调节位置pid控制器的参数,使得输出电流与所述阀芯位移实验值对应的比例阀线圈电流实验值相一致,得到位置pid 控制器的参数,完成所述位置pid控制
器的设计。
14.优选的,所述电流pid控制器通过以下步骤得到:
15.根据比例阀相关实验数据中,所述比例阀线圈电流实验值及其所对应的阀芯位移实验值,以及所述阀芯线圈初始驱动电流,计算出考虑死区后比例阀线圈电流与阀芯位移量之间的关系;
16.所述位置pid控制器基于第二指令信号进行处理,得到第二阀芯线圈驱动电流;
17.将所述阀芯位移量所对应的所述比例阀线圈电流与所述第二阀芯线圈驱动电流的差值作为电流pid控制器的输入,通过调节电流pid控制器的参数,使输出位移与所述阀芯位移量一致,完成所述电流pid控制器的设计,并记录输出的驱动电流。
18.优选的,所述神经网络模型通过以下训练步骤得到:
19.步骤1:搭建所述位置pid控制器和所述电流pid控制器的闭环pid控制系统,所述位置pid控制器基于第一指令信号进行处理,得到第一阀芯线圈驱动电流;所述第一阀芯线圈驱动电流与所述驱动电流作差后作为所述电流 pid控制器的输入,经处理后得到第一阀芯线圈实际驱动电流,进而得到第一阀芯位移;
20.步骤2:将所述第一指令信号与所述第一阀芯位移的偏差值作为神经网络模型的输入,将所述第一阀芯线圈实际驱动电流作为神经网络模型的目标输出值;
21.对神经网络模型的权值进行初始化;
22.步骤3:将输入值经过卷积层、下采样层、全连接层的前向传播得到输出值;
23.步骤4:计算所述输出值与所述目标输出值之间的偏差值e,判断所述偏差值e是否大于期望值,若大于,则计算全连接层、下采样层、卷积层的误差,若不大于则结束训练,得到训练好的神经网络模型;
24.步骤5:基于误差求得误差梯度并更新权值,返回步骤3中。
25.优选的,所述偏差信号为所述指令信号和所述阀芯位移实验值的差值。
26.一种呼吸机比例阀的高精度控制方法,包括:
27.基于神经网络模型对偏差信号进行处理,得到阀芯线圈补偿电流;
28.对指令信号和阀芯位移实验值的差值进行处理,输出阀芯线圈驱动电流;
29.基于所述阀芯线圈补偿电流、所述阀芯线圈驱动电流和比例阀线圈电流实验值进行处理,输出阀芯线圈实际驱动电流。
30.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于呼吸机比例阀的高精度控制系统和方法,在传统pid控制的基础之上,引入由神经网络训练模型所组成的前馈控制器和对阀芯线圈电流的闭环pid控制系统。消除了系统中存在的“死区”、装置之间的摩擦等带来的非线性因素的影响,提高了系统的控制精度。同时也抑制了环境中噪声信号的干扰,提高了系统的抗干扰能力和鲁棒性。此外,由于前馈控制器的引入,也提高了系统的响应速度。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据
提供的附图获得其他的附图。
32.图1附图为本发明提供的呼吸机比例阀的高精度控制系统原理框图。
33.图2附图为本发明提供的位置pid控制器和电流pid控制器控制原理框图。
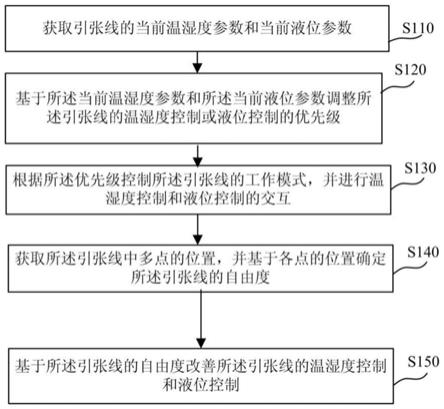
34.图3附图为本发明提供的神经网络模型训练流程图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.实施例1:本发明实施例公开了一种呼吸机比例阀的高精度控制系统,如图1所示,包括:前馈控制器和闭环pid控制系统,闭环pid控制系统包括位置pid控制器和电流pid控制器;
37.前馈控制器用于基于神经网络模型对偏差信号进行处理,得到阀芯线圈补偿电流;偏差信号为指令信号和阀芯位移实验值的差值;
38.位置pid控制器用于对指令信号和阀芯位移实验值的差值进行处理,输出阀芯线圈驱动电流;指定信号一般为电压信号,表示要是阀芯想要达到的期望位置;
39.电流pid控制器以阀芯线圈补偿电流和阀芯线圈驱动电流叠加后与比例阀线圈电流实验值的差值作为输入,输出阀芯线圈实际驱动电流。
40.其中,阀芯位移实验值与比例阀线圈电流实验值是在获取比例阀相关实验中得到的,其中阀芯位移实验值、比例阀线圈电流实验值是与指令信号相对应的压力下测得的。
41.进一步,位置pid控制器通过以下步骤得到:
42.获取比例阀的相关实验数据:测试不同压力下,比例阀线圈电流实验值及其所对应的阀芯位移实验值,得到比例阀线圈电流实验值与阀芯位移实验值之间的关系,同时测量出阀芯线圈初始驱动电流;
43.将阀芯位移实验值转化为电压信号后,与控制阀指令信号的差值作为位置pid控制器的输入,通过调节位置pid控制器的参数,使得输出电流与阀芯位移实验值对应的比例阀线圈电流实验值相一致,得到位置pid控制器的参数,完成位置pid控制器的设计。
44.位置pid控制器主要是用来对阀芯位置做初步的控制。通过位移传感器的测量得到的阀芯位移作为反馈信号,其与指令信号的差值作为位置pid的输入信号,通过位置pid控制器的作用输出比例阀线圈的控制电流,驱动比例阀阀芯能够快速且精确移动到输入指令信号中的指定位置。
45.进一步,电流pid控制器通过以下步骤得到:
46.根据比例阀相关实验数据中,比例阀线圈电流实验值及其所对应的阀芯位移实验值,以及阀芯线圈初始驱动电流,计算出考虑死区后比例阀线圈电流与阀芯位移量之间的关系;
47.位置pid控制器基于第二指令信号进行处理,得到第二阀芯线圈驱动电流;
48.将阀芯位移量所对应的比例阀线圈电流与第二阀芯线圈驱动电流的差值作为电流pid控制器的输入,通过调节电流pid控制器的参数,使输出位移与阀芯位移量一致,完成
电流pid控制器的设计,并记录输出的驱动电流。
49.由于比例阀系统中一般存在死区电流、摩擦等非线性因素,导致控制精度不是很高。因此,在原有pid控制的基础之上,设计了闭环的电流pid控制器,用于消除非线性因素的影响。电流pid起到了一个电流补偿的作用,补偿了由于死区和摩擦等因素造成的电流损失,因而提高了系统的控制精度。
50.进一步,神经网络模型通过以下训练步骤得到,如图3所示:
51.步骤1:搭建位置pid控制器和电流pid控制器的闭环pid控制系统,如图2所示,位置pid控制器基于第一指令信号进行处理,得到第一阀芯线圈驱动电流;第一阀芯线圈驱动电流与驱动电流作差后作为电流pid控制器的输入,经处理后得到第一阀芯线圈实际驱动电流,进而得到第一阀芯位移;
52.步骤2:将第一指令信号与第一阀芯位移的偏差值作为神经网络模型的输入,将第一阀芯线圈实际驱动电流作为神经网络模型的目标输出值;
53.对神经网络模型的权值进行初始化;
54.步骤3:将输入值经过卷积层、下采样层、全连接层的前向传播得到输出值;
55.步骤4:计算输出值与目标输出值之间的偏差值e,判断偏差值e是否大于期望值,若大于,则计算全连接层、下采样层、卷积层的误差,若不大于则结束训练,得到训练好的神经网络模型;
56.步骤5:基于误差求得误差梯度并更新权值,返回步骤3中。
57.在实际的控制系统中,由于环境中噪声信号以及其他未知因素的干扰,也会使pid控制存在一定的误差,影响系统的控制精度。为了减小这些因素的影响,本发明引入了由神经网络训练的出的前馈控制器模型,其输出的线圈电流叠加到位置pid控制器的输出电流值中,用于补偿由于位置干扰存在而导致的pid控制的阀芯目标位移与实际位移之间的误差,进一步提高了系统的控制精度。
58.实施例2,基于实施例1提供的系统,设计了一种呼吸机比例阀的高精度控制方法,包括:
59.基于神经网络模型对偏差信号进行处理,得到阀芯线圈补偿电流;
60.对指令信号和阀芯位移实验值的差值进行处理,输出阀芯线圈驱动电流;
61.基于阀芯线圈补偿电流、阀芯线圈驱动电流和比例阀线圈电流实验值进行处理,输出阀芯线圈实际驱动电流。
62.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
63.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。