1.本发明涉及一种用于通过使用不同的传感器信息来确定物体位置的方法、一种计算机程序、一种机器可读存储介质和一种用于机动车的控制器。本发明特别是可以用于主动检测卡尔曼滤波器的收敛。
背景技术:
2.在文献中,卡尔曼滤波器的收敛多指渐近收敛。这意味着,对于t
→
∞,估计误差x趋近于零。大多数解决方法都引用了所谓的“随机稳定性引理”。这个引理说明了随机过程在哪些条件下是指数有界的。此外可导出卡尔曼滤波器的渐近收敛界限。由于推导这些界限的前提条件非常强,因此也可以推导出弱化的前提条件。然而,这些结果仅具有纯理论用途,因为其仅适用于t
→
∞,从而通常无法指定实际误差的具体界限。在线性卡尔曼滤波器的情况下可能存在例外。就此而言,也可以基于卡尔曼滤波器方程推导出实际误差的对应界限。然而,该结果仅对线性卡尔曼滤波器有效。目前为止尚未显示出对扩展卡尔曼滤波器的扩展性。此外,在上述例外中未考虑预测步骤中的输入,并且假设了关于噪声、协方差和初始化误差的某些先验知识。
3.此外,由于没有协同考虑误差的概率性质,因此所导出的界限非常不精确。
技术实现要素:
4.在此说明了一种用于通过使用不同的传感器信息来确定物体位置的方法,该方法至少包括以下步骤:
5.a)将传感器信息读取到卡尔曼滤波器中,
6.b)将传感器信息与卡尔曼滤波器融合,其中卡尔曼滤波器提供对于多个状态的估计值以及与这些估计值相对应的关于估计精度的信息作为结果,
7.c)通过对估计误差位于误差带内的精度概率的估计来监控卡尔曼滤波器的结果,其中通过使用多个条件概率来求取精度概率,多个条件概率的条件分别涉及至少一个先前时间步长的估计误差。
8.在步骤a)中,将传感器信息读取到卡尔曼滤波器中。传感器信息例如可以是以下传感器中的一个或多个传感器的信息:诸如光学传感器(摄像机、激光雷达)、声学传感器(超声波传感器)、雷达传感器的环境传感器和/或诸如gnss传感器的位置传感器。在此,gnss代表全球导航卫星系统。在步骤a)中,优选地读取不同传感器的传感器信息。
9.在步骤b)中,将传感器信息与卡尔曼滤波器融合,其中卡尔曼滤波器提供对于多个状态的估计值以及与这些估计值相对应的关于估计精度的信息作为结果。关于估计精度的相应信息例如可以是与估计值相关联的方差。
10.在步骤c)中,通过对(特定时间步长的)估计误差位于误差带内的精度概率的估计来监控卡尔曼滤波器的结果,其中通过使用多个条件概率来确定精度概率,多个条件概率的条件分别涉及至少一个先前时间步长(即早于该特定时间步长的时间步长)中的估计误
差。条件概率是一个事件在条件下发生的概率,其中通过其他事件的发生而已经已知该条件。步骤c)特别是用于(主动)监控或检测卡尔曼滤波器的收敛。
11.根据一个有利的设计方案提出,在步骤c)中求取条件概率的界限。在此,在步骤c)中可以推导出或求取以下界限中的至少一个或多个:p(|x
t
|》ε||x
t-1
|》ε),p(|x
t
|》ε||x
t-1
|《ε),p(|x
t
|《ε||x
t-1
|》ε)和/或p(|x
t
|《ε||x
t-1
|《ε)。这些界限或概率也可以针对比时间步长t和t-1更多的时间步长来推导出或求取概率。这些概率特别是可以被分配给网格的边缘。然后可以沿网格的边缘推导出或求取p(|x
t
|》ε)的(上)界限。
12.根据另一有利的设计方案提出,通过使用拜勒米-切比雪夫不等式和/或伯格不等式来求取界限。拜勒米-切比雪夫不等式和伯格不等式特别是用于求取边界。在“journal of research of the national bureau of standards-b.mathematics and mathematical statistics 65b.3(1961)”中说明了拜勒米-切比雪夫不等式和伯格不等式。
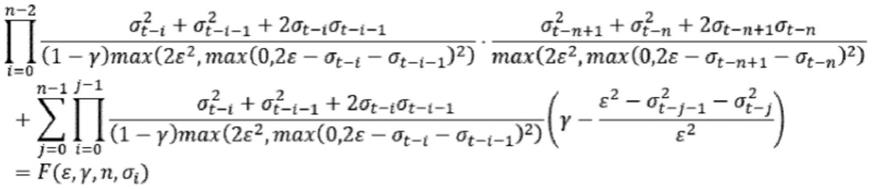
13.根据另一有利的设计方案提出,在步骤c)中以如下公式来求取精度概率的(上)界限:
[0014][0015]
在此,f描述了精度概率的界限,其特别是取决于ε、γ和σ。在此,σ
i2
描述了卡尔曼滤波器在时间点i的方差。此外,ε描述了(最大可接受的)误差。此外,γ描述了误差应位于误差带
±
ε内的(最大或最小精度)概率。
[0016]
然后可以由所取求的界限f以如下方式来估计精度概率p(|x
t
|《ε):
[0017]
p(|x
t
|《ε)≥1-f(ε,γ,n,σi)。
[0018]
根据另一有利的设计方案提出,在步骤c)中对于卡尔曼滤波器的估计值求取其是否以给定的(最小)精度概率(公式符号γ)具有或包含(给定的)可接受估计误差。换言之,这特别是意味着可以预设ε和/或γ,从而可以求取p(|x
t
|《ε)的界限。
[0019]
以这种方式实际求取的概率p(|x
t
|《ε)的界限可以与(指定或预设的)最小概率γ进行比较。然后,基于该估计可以针对相应的应用采取进一步的措施,例如,如果误差(以给定的精度概率)小于最大可接受误差,则授权自动驾驶。
[0020]
根据另一有利的设计方案提出,通过使用多个车辆传感器的不同传感器信息来执行该方法,以用于确定车辆位置。在此,车辆位置特别是描述了机动车的大地位置。车辆传感器例如可以是光学传感器、声学传感器、雷达传感器和/或gnss传感器。优选地,机动车是被设置用于自动或自主驾驶操作的汽车。
[0021]
根据另一方面,还提出了一种用于执行在此描述的方法的计算机程序。换言之,特别是涉及一种包括指令的计算机程序(产品),该指令在程序由计算机运行时使计算机执行在此描述的方法。
[0022]
根据另一方面,还提出了一种机器可读的存储介质,在该存储介质上存储有计算机程序。机器可读的存储介质通常是计算机可读的数据载体。
[0023]
根据另一方面,还提出了一种用于机动车的控制器,该控制器具有在此提出的存储介质。换言之,这特别是意味着存储介质可以是控制器的一部分或者可以与控制器连接。在此,控制器例如可以形成导航单元和/或用于自动或自主驾驶的控制器,或者是其一部分。控制器特别是可以被设置且配置用于车辆的自主运行。控制器可以包括处理器,处理器可以访问存储介质以运行指令,从而执行在此描述的方法。
[0024]
结合该方法所论的细节、特征和有利设计方案也可以相应地出现在本文所介绍的计算机程序、存储介质和/或控制器中,反之亦然。就此而言,充分参考相应的陈述以获得更详细的特征表征。
附图说明
[0025]
下面参考附图更详细地解释在此介绍的解决方案及其技术环境。应指出的是,本发明不旨在受到所示实施例的限制。特别是除非另有明确说明,否则也可以提取附图中所述事实的部分方面并将其与来自其他附图和/或本说明书的其他组成部分和/或认知相结合。附图中:
[0026]
图1示意性地示出了所描述的方法的示例性流程图,并且
[0027]
图2示意性地示出了示例性求取精度概率的图示。
具体实施方式
[0028]
图1示意性地示出了所描述的方法的示例性流程图。该方法用于通过使用不同的传感器信息来确定物体位置。以框110、120和130表示的步骤a)、b)和c)的顺序是示例性的,并且可以依次运行至少一次或多次。此外,步骤a)、b)和c),特别是步骤b)和c),也可以至少部分地并行或同时进行。
[0029]
在框110中,根据步骤a),将传感器信息读取到卡尔曼滤波器中。在框120中,根据步骤b),将传感器信息与卡尔曼滤波器融合,其中卡尔曼滤波器提供对于多个状态x的估计值x
估计
以及与这些估计值x
估计
相对应的关于估计精度的信息σ2作为结果。在框130中,根据步骤c),通过对估计误差x=x-x
估计
位于误差带
±
ε内的精度概率p(|x
t
|《ε)的估计来监控卡尔曼滤波器的结果,其中通过使用多个条件概率来求取精度概率,这些条件概率的条件分别涉及至少一个先前时间步长的估计误差x
t-1
,x
t-2
,
…
。
[0030]
通常,卡尔曼滤波器不仅提供对状态x的估计,而且提供其方差σ2。因此,卡尔曼滤波器提供有关其承受能力的信息。问题是卡尔曼滤波器的估计值何时位于一定的容错范围内。这在初始阶段特别重要,因为滤波器必须在初始化之后先瞬态振荡稳定下来。由此,在使用卡尔曼滤波器时的基本任务是确定此瞬态振荡过程的结束。
[0031]
这可以使用该方法以特别有利的方式被确定。此外,利用所提出的方法还可以在任何之后的时间点确定误差是否以(给定的)(最小)概率或(最小)精度概率(公式符号γ)位于(给定的)误差带(公式符号
±
ε)中,从而是值得信赖的。由此,如果由于测量值不准确而导致预期误差对于相关应用而言过大,则例如可以触发警报。
[0032]
特别是为概率p(|x-x
est
|≤ε)≥γ推导出下界限γ。在此,ε为(给定的)最大可接受误差。就此而言,可能的应用如下:如果估计状态x
est
和真实状态x之差以足够高的概率小于(给定的)误差限制ε,则假定该估计是可靠的。
[0033]
就此而言,一个特别的困难在于,在不了解潜在概率分布和相关性的情况下为概率p(|x-x
est
|≤ε)推导出下界限γ。尽管基于正态分布的解决方案很容易计算,但一般情况下会出现一些问题。在此,特别有利地也可以为这种情况通过以下方式指定可能的解决方案,即使用拜勒米-切比雪夫不等式和/或伯格不等式来求取条件概率的界限。所使用的拜勒米-切比雪夫不等式和/或伯格不等式在“r.savage:
‘
probability inequalities of the tchebycheff type’.journal of research of the national bureau of standards-b.mathematics and mathematical statistics 65b.3(1961)”中给出。
[0034]
在此,作为特别是唯一的假设,可以假定卡尔曼滤波器的方差没有误差。此外,特别是不考虑模型误差和/或测量误差。基于这个假设,在该方法中所应用的方法可以特别是在没有其他启发式假设的情况下从数学上进行推导。在进一步有利的方式中,这使得该方法可以应用于广泛的领域中,而无需进一步调整。此外,对于特别安全关键的应用可以确保所导出的界限是可靠有效的,而不仅仅是近似正确的。当然,后者仅适用于由卡尔曼滤波器所计算的方差有效的前提下。
[0035]
卡尔曼滤波器基于先前状态(预测)和测量变量(测量更新)来估计一个过程的状态。卡尔曼滤波器还对于每个状态计算对应的方差。对估计方差的计算相应地基于先前状态的方差和用于计算状态的测量值的方差。这些方差在下文中以σ2表示。在此,t是指卡尔曼滤波器的第t个时间步长。这些方差提供关于状态估计可靠性的信息。然而,方差和预期误差之间的关系取决于所基于的分布函数。如果这是未知的,则仅可以通过例如应用切比雪夫不等式来估计方差和误差的换算。此外,如果状态的误差是相关的,则也可以不再应用切比雪夫不等式。对于这种情况,在此将推导出一个特别有利的(自身)估计:
[0036]
为此优选使用拜勒米-切比雪夫不等式和/或伯格不等式,其例如在“journal of research of the national bureau of standards-b.mathematics and mathematical statistics 65b.3(1961)”中给出。该不等式用于推导出多个条件概率的界限,特别是p(|x
t
|》ε||x
t-1
|》ε),p(|x
t
|》ε||x
t-1
|《ε),p(|x
t
|《ε||x
t-1
|》ε)和p(|x
t
|《ε||x
t-1
|《ε)。
[0037]
这些概率被分配给网格的边缘。这示例性地在图2中示出。在此,网格的下边缘表示保持误差限制ε的状态。相反,上边缘示出未保持而是超过误差限制ε的状态。
[0038]
现在沿网格的边缘推导出在时间点t的p(|x
t
|》ε)的上界限。最终结果使用卡尔曼滤波器在时间点i的方差σ2:
[0039][0040]
由此:
[0041]
p(|e
t
|<ε)≥1-f(ε,γ,n,σi)
[0042]
该界限使得可以评估误差e
t
或x
t
是否以至少为1-f(ε,γ,n,σi)的概率位于误差带
±
ε内。由此,对于卡尔曼滤波器的每个估计值x
估计
可以指明其是否以给定的(最小或最小精度)概率γ具有可接受的(估计)误差e
t
或x
t
。在此,γ描述了误差应位于误差带
±
ε内的(最小或最小精度)概率。换言之,γ描述了精度概率p(|x
t
|《ε)的预设的目标参数。
[0043]
换言之,这特别是意味着可以预设ε和/或γ,从而可以求取p(|x
t
|《ε)的界限。以这种方式实际求取的概率p(|x
t
|《ε)的界限可以与(指定或预定的)最小概率γ进行比较。然后,基于该估计可以针对相应的应用采取进一步的措施,例如在过滤器瞬态振荡稳定后授权自主驾驶。
[0044]
优选地通过使用多个车辆传感器的不同的传感器信息来执行该方法,以用于确定车辆位置。在此,所描述的方法可以用于判定所估计的位置是否可信以及车辆是否可以自主驾驶。
[0045]
该方法有利地可以提高位置精度。在此介绍的方法特别是即使在相关误差的情况下也可以进行有效估计。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。