1.本发明涉及医疗器械技术领域,具体是一种用于神经外科全脑动脉造影的手术机器人系统。
背景技术:
2.目前的全脑动脉造影主要是医生在辐射状态下,在手术床旁进行亲手操作导丝导引、导管跟进,然后将导管递送到目标血管,在高压注射器的配合下完成造影剂的注射。医生做手术过程中,需要穿着20kg重的铅衣且需要长时间暴露在 x射线下进行手术,手术环境恶劣,对医生的体能消耗很大、辐射伤害很高。相比于医生长时间疲劳操作,在神经介入的全脑动脉造影手术中,现需要将医生从辐射状态下的手术床旁解放出来。主要是医生在dsa影像下,通过操控机器人的主端,由机器人的从端执行主端操作的反馈来远程操控导管、导丝,进而使导管、导丝到达相应位置,从而实现造影手术。
3.但是,现有微创血管介入手术机器人,多为科研院所和相关研发机构研制的理论样机,多为实现导管、导丝控制的功能。其产品不能完全模拟医生的操作动作,并且不能实现导管的长距离递送,进而造成操作精度低、手术效率低下、对医生的辅助程度低、存在一定的安全隐患。并且现有的手术机器人较为笨重、结构较为复杂、操作较为繁琐,不具有临床推广价值。
技术实现要素:
4.(一)要解决的技术问题
5.鉴于现有技术的上述缺点、不足,本发明提供一种用于神经外科全脑动脉造影的手术机器人系统。本发明在全脑动脉造影手术中,能够代替医生进行导管、导丝的远程操控,进而使导管、导丝到达相应位置,实现造影手术。
6.(二)技术方案
7.为了达到上述目的,本发明采用的主要技术方案包括:
8.本发明提供一种用于神经外科全脑动脉造影的手术机器人系统,包括主端控制装置和从端执行装置;所述主端控制装置包括操控台、上位机和电控箱,所述操控台与所述上位机连接,所述上位机与所述电控箱连接;所述电控箱与所述从端执行装置连接;所述从端执行装置包括机器人本体,用于调整所述机器人本体位置的支撑机械臂,以及设置在所述机器人本体上的导丝控制器和导管控制器;所述电控箱接收所述操控台发出的指令,并驱动所述导丝控制器和所述导管控制器,以分别控制导丝和导管进行前进、后撤或旋转的动作。
9.进一步地,所述操控台包括控制手柄、急停按钮和显示屏;所述控制手柄通过所述上位机和所述电控箱与所述从端执行装置连接,用于分别控制导丝和导管的前进、后撤或旋转的动作;所述急停按钮通过所述上位机和所述电控箱与所述从端执行装置连接,以停止所述从端执行装置的动作;所述显示屏与所述控制手柄连接,以显示所述控制手柄的状
态。
10.进一步地,所述操控台还包括辅助控制脚踏开关,所述辅助控制脚踏开关与所述支撑机械臂连接。
11.进一步地,所述机器人本体包括外壳以及设置在所述外壳内的双位驱动机构;所述双位驱动机构包括底板组件、同步带组件、远端驱动平台组件、近端驱动平台组件、远端位置反馈组件和近端位置反馈组件;所述同步带组件、所述远端驱动平台组件和所述近端驱动平台组件均设置在所述底板组件上;所述同步带组件的数量至少为两个,其中一个所述同步带组件与所述远端驱动平台组件连接,另一个所述同步带组件与所述近端驱动平台组件连接;所述远端驱动平台组件通过所述远端位置反馈组件与所述上位机连接,所述近端驱动平台组件通过所述近端位置反馈组件与所述上位机连接;所述远端驱动平台组件还与所述导管控制器连接,以驱动所述导管控制器前进、后撤或旋转;所述近端驱动平台组件还与所述导丝控制器连接,以驱动所述导丝控制器前进、后撤或旋转。
12.进一步地,所述导丝控制器包括夹持器壳体、导丝转动机构、导丝夹紧机构、前端导丝套管和后端导丝套管,所述夹持器壳体设置在所述机器人本体的双位驱动机构上;所述导丝转动机构设置在所述夹持器壳体内部前端,以驱动所述前端导丝套管和所述后端导丝套管旋转;所述前端导丝套管和所述后端导丝套管通过所述导丝夹紧机构连接;所述导丝夹紧机构用于夹紧和松开导丝。
13.进一步地,所述导丝夹紧机构包括扭矩夹紧件和第三轴承,所述扭矩夹紧件的一端与所述前端导丝套管连接,所述扭矩夹紧件的另一端与所述第三轴承配合,以夹紧和松开导丝;所述第三轴承与所述后端导丝套管连接,通过驱动所述后端导丝套管向前移动,以带动所述第三轴承向前移动来夹紧所述扭矩夹紧件,进而夹紧穿过所述扭矩夹紧件内的导丝。
14.进一步地,所述导管控制器包括控制器壳体,y阀快换底座,导管转动机构和导管导向机构,所述控制器壳体设置在所述机器人本体的双位驱动机构上;所述y阀快换底座设置在所述控制器壳体内,所述y阀快换底座用于固定不同长度的y阀;所述导管转动机构设置于靠近所述y阀快换底座一侧的控制器壳体内,以驱动与所述y阀连接的导管进行旋转动作;所述导管导向机构与所述控制器壳体连接,以使所述控制器壳体可相对于所述导管导向机构移动,进而限制和引导所述导管移动。
15.进一步地,所述导管控制器还包括手指装配体,所述手指装配体设置在所述控制器壳体的近端,所述手指装配体用于夹紧和松开导丝,从而控制导丝的形态。
16.进一步地,所述导管导向机构包括前端固定组件、c型管、双轮导向组件和后端拉紧组件,所述前端固定组件固定在所述机器人本体前端,并与血管鞘连接;所述前端固定组件与所述c型管的一端通过高压缩比组件连接,所述c型管的另一端绕过所述双轮导向组件与所述后端拉紧组件连接。
17.进一步地,所述支撑机械臂包括机械臂本体、底座、大横臂、小横臂、连接板、水平位置调节机构、升降调节机构、旋转机构和角度调节机构;所述机械臂本体内设置所述升降调节机构,以调整所述机械臂本体的高度;所述机械臂本体的下端通过所述水平位置调节机构与所述底座连接,以调整所述机械臂本体的水平位置;所述大横臂的两端通过所述旋转机构分别与所述机械臂本体的上端和所述小横臂的一端转动连接;所述小横臂的另一端
与所述连接板通过所述角度调节机构连接;所述连接板与所述机器人本体连接。
18.(三)有益效果
19.本发明的有益效果是:本发明提供一种用于神经外科全脑动脉造影的手术机器人系统,采用导管、导丝独立控制方案,能够实现“倒手”、“碾丝”、“翻山”、“超选”等一系列神经介入常用的技术手法。同时,能够实现导管的长距离递送。该技术在临床应用中极具实用价值,该技术能够实现穿刺后手术机器人全程接管,真正意义上实现了将医生从床旁高辐射状态下解放出来的目的。另外,本发明的机器人系统具有稳定操作和反馈的功能,能够有效避免手抖的情况对病人的伤害,提高了手术的稳定性和安全性。
附图说明
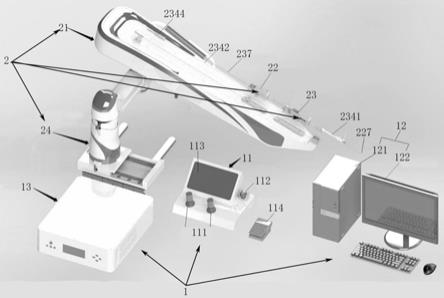
20.图1为本发明一种用于神经外科全脑动脉造影的手术机器人系统的结构示意图;
21.图2为本发明一种用于神经外科全脑动脉造影的手术机器人系统的流程图;
22.图3为本发明从端执行装置的结构示意图;
23.图4为本发明机器人本体的结构示意图;
24.图5为本发明双位驱动机构的结构示意图;
25.图6为本发明同步带组件的结构示意图;
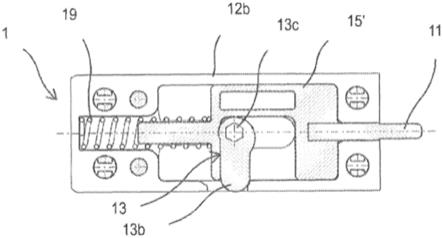
26.图7为本发明导丝控制器的结构示意图;
27.图8为本发明导丝控制器的剖视图;
28.图9为本发明导管控制器的结构示意图;
29.图10为本发明导管控制器的内部结构示意图;
30.图11为本发明手指装配体的结构示意图;
31.图12为本发明手指装配体的侧视图;
32.图13为图12中a-a面的剖视图;
33.图14为手指装配体的驱动器的结构示意图;
34.图15为本发明导管导向机构的结构示意图;
35.图16为本发明前端固定组件的结构示意图;
36.图17为本发明后端拉紧组件的结构示意图;
37.图18为本发明双轮导向组件和高压缩比组件的结构示意图;
38.图19为本发明支撑机械臂的结构示意图。
39.【附图标记说明】
40.1、主端控制装置;
41.11、操控台;111、控制手柄;112、急停按钮;113、显示屏;114、辅助控制脚踏开关;12、上位机;121、主机;122、显示器;13、电控箱;
42.2、从端执行装置;
43.21、机器人本体;211外壳;212、双位驱动机构;2121、底板组件;21211、机器人底板;21212、导轨;21213、张紧安装板;21214、扶手;21215、扶手安装板;2122、同步带组件;21221、第一轴承座;21222、第一卡簧;21223、第一轴承;21224、第一转轴;21225、从动同步带轮;21226、同步带本体;21227、主动同步带轮;21228、第二轴承座;21229、第二卡簧;212210、第二轴承;212211 第二转轴;212212、电机;212213、上同步带压片;212214、下同步
带压片;2123、远端驱动平台组件;21231、远端支架连接架;21232、远端延伸臂;21233、远端卡槽;2124、近端驱动平台组件;21241、近端支架连接架;21242、近端延伸臂;21243、近端卡槽;2125、远端位置反馈组件;21251、远端坦克链拉片;21252:远端坦克链压片;21253、远端编码器拉片;21254、远端拉线编码器;2126、近端位置反馈组件;21261、近端坦克链拉片;21262:近端坦克链压片;21263、近端编码器拉片;21264、近端拉线编码器;2127、光电传感器;
44.22、导丝控制器;221、夹持器壳体;2211、夹持器底座;2212、夹持器上盖;222、导丝转动机构;2221、电机锥齿轮;2222、导丝锥齿轮;2223、导丝电机轴;223、导丝夹紧机构;2231、扭矩夹紧件;2232、第三轴承;224、前端导丝套管;225、后端导丝套管;226、导丝船型连接夹;227、导丝;228、第四轴承;
45.23、导管控制器;231、控制器壳体;2311、控制器固定座;2312、上端盖; 2313、导管孔;2314、卡接槽;2315、齿轮槽;232、y阀快换底座;2321、y 阀;233、导管转动机构;2331、电机齿轮;2332、导管齿轮;2333、齿轮连杆; 234、导管导向机构;2341、前端固定组件;23411、c型管固定件;23412、万向节;23413、套筒;23414、罗伯特夹子;2342、c型管;2343、双轮导向组件; 23431、前滚轮;23432、侧滚轮;23433、滚轮支架;2344、后端拉紧组件;23441、钩杆;23442、连接螺柱;2345、高压缩比组件;23451、前端弹簧压片;23452、弹簧;23453、后端弹簧压片;235、手指装配体;2351、抓手;2352、舵机连接轴;2353、连杆;2354、驱动器;23541、第一驱动块;23542、第二驱动块;2355、连杆压板;2356、支撑架;236、导管船型连接夹;237、导管;
46.24、支撑机械臂;241、机械臂本体;242、底座;243、大横臂;244、小横臂;245、连接板;246、水平位置调节机构;247、升降调节机构;248、角度调节机构;249、旋转机构。
具体实施方式
47.为了更好的理解上述技术方案,下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
48.实施例:
49.参照图1和图2,本发明提供一种用于神经外科全脑动脉造影的手术机器人系统。该系统能够完全代替医生进行导管237、导丝227的远程操作。该系统包括主端控制装置1和从端执行装置2。其中,主端控制装置1包括操控台11、上位机12和电控箱13。操控台11与上位机12连接,上位机12与电控箱13连接,电控箱13与从端执行装置2连接。从端执行装置2包括机器人本体21,用于调整机器人本体21位置的支撑机械臂24,以及设置在机器人本体21上的导丝控制器22和导管控制器23。电控箱13接收操控台11发出的指令,并驱动导丝控制器22和导管控制器23,以分别控制导丝227和导管237进行前进、后撤或旋转的动作。
50.本发明的上位机12用于储存和运行系统控制软件。主端的操控台11通过导管、导丝控制手柄111来收集医生的操作信号,并转化为从端的输入指令。从端的导丝控制器22和导管控制器23用于将主端输送的信号进行执行,如导丝227、导管237的旋转、前进、后撤等操作。支撑机械臂24为从端的机器人本体21提供支持,使从端与手术床进行刚性连接,同时
为从端的姿态控制提供自由度。电控箱13用于将主端传出的信号进行收集,并转化为从端的输入信号,对从端发出运动指令,同时监控从端的运动。
51.具体地,操控台11包括控制手柄111、急停按钮112和显示屏113。控制手柄111通过上位机12和电控箱13与从端执行装置2连接,用于分别控制导管237 和导丝227的前进、后撤或旋转的动作。控制手柄111可以包括导管237控制手柄111和导丝227控制手柄111。急停按钮112通过上位机12和电控箱13与从端执行装置2连接,以停止从端执行装置2的动作。显示屏113与控制手柄111 连接,以显示控制手柄111的状态,例如前进或后撤的位移,旋转角度等。
52.操控台11还包括辅助控制脚踏开关114,辅助控制脚踏开关114与支撑机械臂24内的失电抱闸器连接,以控制支撑机械臂24的转动角度。
53.具体地,参照图3-图5,机器人本体21包括外壳211以及设置在外壳211 内的双位驱动机构212。双位驱动机构212包括底板组件2121、同步带组件2122、远端驱动平台组件2123、近端驱动平台组件2124、远端位置反馈组件2125和近端位置反馈组件2126。同步带组件2122、远端驱动平台组件2123和近端驱动平台组件2124均设置在底板组件2121上。同步带组件2122的数量至少为两个,其中一个同步带组件2122与远端驱动平台组件2123连接,另一个同步带组件 2122与近端驱动平台组件2124连接。远端驱动平台组件2123通过远端位置反馈组件2125与上位机12连接,近端驱动平台组件2124通过近端位置反馈组件2126 与上位机12连接。远端驱动平台组件2123还与导管控制器23连接,以驱动导管控制器23前进、后撤或旋转。近端驱动平台组件2124还与导丝控制器22连接,以驱动导丝控制器22前进、后撤或旋转。
54.其中,底板组件2121包括机器人底板21211、导轨21212和张紧安装板21213。机器人底板21211固定安装在外壳211的壳体内部,机器人底板21211上方沿长度方向设置有导轨21212。机器人底板21211的一端上部设置有张紧安装板21213,张紧安装板21213用于张紧连接同步带组件2122。具体地,导轨21212安装在机器人底板21211的中央;张紧安装板21213安装在机器人底板21211的前端,并用m5
×
15内六角螺栓与机器人底板21211连接固定。底板组件2121还包括设置在机器人底板21211一侧的扶手21214,用于手术操作过程中,医生控制机器人本体21姿态的手柄。
55.其中,参照图6,同步带组件2122包括从动同步带轮21225、同步带本体21226 和主动同步带轮21227。从动同步带轮21225与主动同步带轮21227之间设置同步带本体21226,同步带本体21226的端部通过连接件连接。从动同步带轮21225 通过轴承座与底板组件2121连接,主动同步带轮21227通过轴承座与底板组件 2121连接。主动同步带轮21227与驱动器2354连接,以带动同步带本体21226 转动。具体地,本实施例的驱动器2354为电机212212。从动轮侧:第一转轴21224 穿过从动同步带轮21225的中心孔,并且在从动同步带轮21225两侧的第一转轴 21224上分别套有两个第一轴承21223,两个第一轴承21223分别安装在两个第一轴承21223座21221的中心孔内。第一卡簧21222卡接在第一轴承21223座 21221的内部卡槽里,以限制第一轴承21223的位置。主动轮侧:第二转轴212211 穿过主动同步带轮21227的中心孔,在主动同步带轮21227两侧的第二转轴 212211上分别套有两个第二轴承212210,两个第二轴承212210安装在两个第二轴承212210座21228的中心孔内。第二卡簧21229卡接在第二轴承212210座 21228的内部卡槽里,以限制第二轴承212210的位
置。电机212212的输出轴与第二转轴212211连接,通过驱动第二转轴212211转动,进而带动与之相连接的主动同步带轮21227转动。通过同步带本体21226将从动同步带轮21225和主动同步带轮21227进行连接。将同步带本体21226调整好长度之后,剪裁,用连接件将同步带本体21226的两端部进行连接。本实施例的连接件包括上同步带压片 212213和下同步带压片212214,用上同步带压片212213和下同步带压片212214 压紧同步带本体21226的端部开口处,以将同步带本体21226围绕在从动同步带轮21225和主动同步带轮21227之间。同时,上同步带压片212213和下同步带压片212214的组合体上预留有连接孔,用于连接远端驱动平台组件2123和近端驱动平台组件2124,以此来为远端驱动平台组件2123上的导管控制器23和近端驱动平台组件2124上的导丝控制器22提供动力。
56.其中,参照图5,远端驱动平台组件2123包括远端支架连接架21231、远端延伸臂21232和远端卡槽21233。远端支架连接架21231与底板组件2121滑动连接,远端支架连接架21231与同步带组件2122固定连接。远端支架连接架21231 与远端延伸臂21232的一端连接,远端延伸臂21232的另一端设置有用于连接导管控制器23的远端卡槽21233。具体地,远端支架连接架21231为带滑块的安装板,为远端驱动平台组件2123的其他连接件提供结构支撑。远端延伸臂21232 安装在远端支架连接架21231上方。远端卡槽21233用m2
×
20沉头螺钉固定在远端延伸臂21232的一端中央,用于实现导管控制器23的快速安装和拆卸。
57.其中,远端位置反馈组件2125包括远端坦克链拉片21251、远端坦克链压片 21252、远端编码器拉片21253和远端拉线编码器21254。远端坦克链拉片21251 设置在远端支架连接架21231一侧的底板组件2121上,远端坦克链压片21252 设置在远端坦克链拉片21251的上端。远端编码器拉片21253设置在远端支架连接架21231另一侧的底板组件2121上,远端编码器拉片21253通过拉线与远端拉线编码器21254连接。远端拉线编码器21254固定在底板组件2121上,并与远端驱动平台组件2123连接,用于检测远端驱动平台组件2123的位移信息,并反馈给主端控制装置1。远端拉线编码器21254通过安装板与底板组件2121的机器人底板21211的后端固定连接。具体地,远端坦克链拉片21251安装在远端支架连接架21231的右侧的底板组件2121上,远端坦克链压片21252安装在远端坦克链拉片21251的上端,方向向外。远端坦克链压片21252用于引导坦克链。远端编码器拉片21253安装在远端支架连接架21231的左侧的底板组件2121上,远端拉线编码器21254的拉线安装在远端编码器拉片21253上端的螺纹柱上,拉线与远端编码器拉片21253同步移动。
58.其中,参照图5,近端驱动平台组件2124包括近端支架连接架21241、近端延伸臂21242和近端卡槽21243。近端支架连接架21241与底板组件2121滑动连接,近端支架连接架21241与同步带组件2122固定连接。近端支架连接架21241 与近端延伸臂21242的一端连接,近端延伸臂21242的另一端设置有用于连接导丝控制器22的近端卡槽21243。具体地,近端支架连接架21241为带滑块的安装板,为近端驱动平台组件2124的其他连接件提供结构支撑。近端延伸臂21242 安装在近端支架连接架21241上方。近端卡槽21243用m2
×
20沉头螺钉固定在近端延伸臂21242的一端中央,用于实现导丝控制器22的快速安装和拆卸。
59.其中,近端位置反馈组件2126包括近端坦克链拉片21261、近端坦克链压片 21262、近端编码器拉片21263和近端拉线编码器21264。近端坦克链拉片21261 设置在近端支架连接架21241一侧的底板组件2121上,近端坦克链压片21262 设置在近端坦克链拉片21261的上端。近端编码器拉片21263设置在近端支架连接架21241一侧的底板组件2121上,
近端编码器拉片21263通过拉线与近端拉线编码器21264连接。近端拉线编码器21264固定在底板组件2121上,并与近端驱动平台组件2124连接,用于检测近端驱动平台组件2124的位移信息,并反馈给主端控制装置1。近端拉线编码器21264通过安装板与底板组件2121的机器人底板21211的后端固定连接。具体地,近端坦克链拉片21261安装在近端支架连接架21241的右侧的底板组件2121上,近端坦克链压片21262安装在近端坦克链拉片21261的上端,方向向外。近端编码器拉片21263安装在近端支架连接架21241的右侧的底板组件2121上。近端拉线编码器21264的拉线安装在近端编码器拉片21263上端的螺纹柱上,拉线与近端编码器拉片21263同步移动。
60.其中,参照图4,外壳211上表面的中间设置有用于安装导管控制器23和导丝控制器22的长条孔。具体地,壳体作为外壳211的主要架构,双位驱动机构 212的机器人底板21211安装在壳体的内侧安装槽内,双位驱动机构212的其他部件安装在机器人底板21211上。本发明的外壳211在双位驱动机构212周围形成密封表面,起到保护、支撑和无菌隔绝的作用。
61.本发明的双位驱动机构212还包括限位机构,限位机构分别设置在底板组件 2121的两端,以限制远端驱动平台组件2123和近端驱动平台组件2124的移动范围。本实施例的限位机构为光电传感器2127。
62.本发明机器人本体21的工作原理为:近端驱动平台组件2124和远端驱动平台组件2123分别安装在底板组件2121的导轨21212上。两个同步带组件2122 均布在底板组件2121的导轨21212两侧,同步带组件2122的上同步带压片 212213和下同步带压片212214的组合体上预留有连接孔,分别用于与近端驱动平台组件2124和远端驱动平台组件2123的预留孔相连接,形成统一整体。可通过电机212212的驱动来实现近端驱动平台组件2124和远端驱动平台组件2123 在导轨21212上的往复移动。与近端驱动平台组件2124和远端驱动平台组件2123 相连接的近端拉线编码器21264和远端拉线编码器21254,分别通过拉线的伸缩来实现对近端驱动平台组件2124和远端驱动平台组件2123的运行位置的实时位置记录和反馈。通过对近端驱动平台组件2124和远端驱动平台组件2123的控制和反馈,进而控制在该平台组件上的导管控制器23、导丝控制器22,进而控制导管237、导丝227的驱动位置记录和反馈,以此来实现介入手术过程中对导管 237、导丝227的远程递送和控制。
63.具体地,参照图7和图8,导丝控制器22包括夹持器壳体221、导丝转动机构222、导丝夹紧机构223、前端导丝套管224和后端导丝套管225。夹持器壳体 221设置在机器人本体21的双位驱动机构的近端驱动平台组件2124上。具体地,可以通过设置在夹持器壳体221两侧的导丝船型连接夹226将夹持器壳体221固定在近端驱动平台组件2124上;通过导丝船型连接夹226可以实现导丝控制器 22的快速安装及拆卸。导丝转动机构222设置在夹持器壳体221内部前端,以驱动前端导丝套管224和后端导丝套管225旋转。具体地,导丝转动机构222包括电机锥齿轮2221和导丝锥齿轮2222。导丝227穿过前端导丝套管224和后端导丝套管225,前端导丝套管224与导丝锥齿轮2222固定。电机锥齿轮2221与设置在近端驱动平台组件2124上的驱动电机连接,电机锥齿轮2221和导丝锥齿轮 2222形成90
°
锥齿轮外啮合,驱动电机旋转运动副能够有效传递到导丝227上。前端导丝套管224和后端导丝套管225通过导丝夹紧机构223连接;导丝夹紧机构223用于夹紧和松开导丝227。其中,导丝夹紧机构223包括扭矩夹紧件2231 和第三轴承2232。扭矩夹紧件2231的一端与前端导丝套管224连
接,扭矩夹紧件2231的另一端与第三轴承2232配合,以夹紧和松开导丝227。第三轴承2232 与后端导丝套管225连接,通过驱动后端导丝套管225向前移动,以带动第三轴承2232向前移动来夹紧扭矩夹紧件2231,进而夹紧穿过扭矩夹紧件2231内的导丝227。扭矩夹紧件2231与第三轴承2232连接的一端为可张合的开口结构,通过将第三轴承2232前后移动套设在扭矩夹紧件2231外部,实现扭矩夹紧件2231 的开口结构的张合,进而松开和夹紧导丝227。
64.本发明导丝控制器22的工作原理为:将导丝227从后端导丝套管225穿入,并从前端导丝套管224穿出,然后穿入导管控制器23上的导管237,随导管237 一同进入血管鞘。前端导丝套管224和后端导丝套管225均通过第四轴承228设置在夹持器壳体221内。前端导丝套管224与导丝锥齿轮2222固定,随着导丝锥齿轮2222的转动,进而带动前端导丝套管224内的导丝227随着转动。导丝 227通过夹持器壳体221内的导丝夹紧机构223夹紧,并且随夹持器壳体221一起前后移动。夹持器壳体221、导丝227、导丝夹紧机构223、前端导丝套管224 和后端导丝套管225形成有机械刚性连接的整体。在夹持器壳体221两侧均布两个导丝船型连接夹226,导丝船型连接夹226通过机械锁止的方式将上述有机械刚性连接的整体固定在近端驱动平台组件2124上,导丝227的前进、后撤动作是由导丝控制器22的前进、后撤进而带动与之相连接的导丝227进行前进和后撤的动作,导丝227的旋转由导丝电机轴2223所关联的盘式电机提供旋转驱动力进行顺时针和逆时针旋转。
65.具体地,参照图9-图14,导管控制器23包括控制器壳体231,y阀快换底座232,导管转动机构233和导管导向机构234。控制器壳体231设置在机器人本体21的双位驱动机构的远端驱动平台组件2123上,具体地,可以通过设置在控制器壳体231两侧的导管船型连接夹236将控制器壳体231固定在远端驱动平台组件2123上;通过导管船型连接夹236可以实现导管控制器23的快速安装及拆卸。控制器壳体231包括上端盖2312和控制器固定座2311,上端盖2312用于将控制器固定座2311的内部结构进行覆盖,对内部结构进行防护和支撑。其中,上端盖2312与控制器固定座2311半连接固定。上端盖2312的一边与控制器固定座2311的一边通过轴连接固定;打开上端盖2312,可看见,y阀2321及y 阀快换底座232设于控制器固定座2311内部,上端盖2312的另一边与控制器固定座2311的另一边卡接固定,导管转动机构233设于上端盖2312与控制器固定座2311的内部。控制器固定座2311上设有与y阀快换底座232适配的卡接槽 2314和与导管转动机构233适配的齿轮槽2315,卡接槽2314和齿轮槽2315相邻设置。其中,y阀快换底座232卡接设置在卡接槽2314内,y阀快换底座232 用于固定不同长度的y阀2321。在齿轮槽2315内固定设置有导管转动机构233,导管转动机构233用于驱动与y阀2321连接的导管237的旋转。上端盖2312 用于扣合于控制器固定座2311上,在控制器固定座2311和上端盖2312上靠近齿轮槽2315的一侧开设有导管孔2313,导管孔2313与齿轮槽2315是相通的。如图9和图10所示,导管孔2313供导管237穿过,导管237内设有导丝227。导管导向机构234固定设于靠近卡接槽2314的控制器固定座2311上,并垂直于导管孔2313设置,用于固定支撑导管237,供导管237穿过并支撑导管237的运动。导管导向机构234与控制器壳体231连接,以使控制器壳体231可相对于导管导向机构234移动,进而限制和引导导管237移动。该导管控制器23可用于导管237、导丝227在不同工作状态下的需求使用。
66.具体地,导管转动机构233包括电机齿轮2331和齿轮连杆2333;其中,电机齿轮2331和齿轮连杆2333连接设于控制器固定座2311上的齿轮槽2315内外,电机齿轮2331设于
齿轮槽2315内,齿轮连杆2333穿过控制器固定座2311设于控制器固定座2311上对应齿轮槽2315的下方。导管转动机构233在工作时,是与外配的导管齿轮2332配合使用,导管齿轮2332为异性配合件。如y阀快换底座232上适配地安装有y阀三通,y阀三通为一种y阀2321的通用耗材,可根据需要更换不同类型的y阀2321。导管齿轮2332固定套合于y阀三通的蝶形尾翼上,导管齿轮2332与电机齿轮2331成90
°
锥齿轮外啮合。通过将导管齿轮2332 套合在y阀三通的蝶形尾翼上,y阀三通的蝶形尾翼的末端固定连接导管237,这样就使导管齿轮2332与导管237取得刚性连接,为导管237的旋转提供动力。当外部电机带动齿轮连杆2333旋转,齿轮连杆2333即带动电机齿轮2331旋转,电机齿轮2331从而带动导管齿轮2332的旋转,进一步用于带动导管237的旋转。
67.其中,导管控制器23还包括手指装配体235,手指装配体235设于控制器固定座2311上紧邻卡接槽2314的外侧,通过两个m2
×
28螺钉进行连接和固定,通过底部的舵机往复运动的转化,将垂直运动更改为水平运动,以实现对导丝227 的夹持。手指装配体235设于控制器固定座2311与导管孔2313相对的另一侧,也就是说设于控制器固定座2311上紧邻卡接槽2314的外侧。手指装配体235主要是用于夹紧和松开导丝227,从而来固定导丝227的形态。
68.具体地,手指装配体235的结构如图11-14所示,其包括抓手2351、舵机连接轴2352、连杆2353、驱动器2354、连杆压板2354和支撑架2356。其中,支撑架2356用于支撑手指装配体235,支撑架2356固定设于控制器固定座2311 上。抓手2351用于夹紧和松开导丝227,抓手2351设于支撑架2356上,抓手 2351的下端与支撑架2356转动连接。连杆2353用于给抓手2351提供夹紧和松开动作,设于支撑架2356与抓手2351之间,连杆2353与抓手2351转动连接。驱动器2354用于给抓手2351提供水平方向运动动力,设于支撑架2356与抓手 2351之间,与连杆2353转动连接。连杆压板2354用于固定驱动器2354,固定连接驱动器2354,设于支撑架2356的外侧。用于工作时与外部舵机连接的舵机连接轴2352,设于驱动器2354与连杆压板2354之间。
69.具体地,支撑架2356固定连接在控制器固定座2311的外侧,支撑架2356 用于支撑抓手2351。支撑架2356与抓手2351的下端转动连接。连杆2353和驱动器2354设于支撑架2356与抓手2351之间,驱动器2354与连杆2353转动连接,连杆2353与抓手2351转动连接。驱动器2354固定连接连杆压板2354,连杆压板2354设于支撑架2356外侧,舵机连接轴2352穿过连杆压板2354设于驱动器2354与连杆压板2354的之间。驱动器2354与连杆压板2354可通过螺纹紧固。
70.进一步地,如图12和图14所示,驱动器2354包括第一驱动块23541和第二驱动块23542。第一驱动块23541与第二驱动块23542为一体结构,第一驱动块23541设有半圆形槽与连杆压板2354的半圆形槽配合将舵机连接轴2352夹紧,第二驱动块23542设有矩形槽,通过矩形槽与连杆2353实现转动连接。抓手2351 中部设有通孔,用于与连杆2353做避让,且通孔宽度与连杆2353宽度相同,通孔长度大于连杆2353长度。支撑架2356设有u形槽,第一驱动块23541的两端滑动连接在u形槽内。支撑架2356底部设有圆形通孔,第一驱动块23541底部连接有导向杆,导向杆上套有弹簧23452,弹簧23452在支撑架2356内设置,导向杆贯穿圆形通孔,并沿圆形通孔在弹簧23452的回弹作用下能上下滑动。
71.工作时,舵机连接轴2352底部的螺纹外接有直线舵机,由舵机提供竖直方向的往
复运动副,也就是说,手指装配体235由舵机连接轴2352底部的螺纹与直线舵机的螺纹相连接,带动与舵机连接轴2352固定的连杆压板2354在竖直方向的往复上下运动,第一驱动块23541设有半圆形槽与连杆压板2354的半圆形槽配合将舵机连接轴2352夹紧,从而带动第一驱动块23541进行上下往复运动,第一驱动块23541与第二驱动块23542为一体结构,第二驱动块23542与连杆 2353通过转动连接拉动固定在支撑架2356上的抓手2351进行摆动,从而使两个抓手2351前端部分为水平方向的张开、闭合的往复运动,从而用于夹紧和松开导丝227,以此固定导丝227的形态。
72.具体地,参照图15-18,导管导向机构234包括前端固定组件2341、c型管 2342、双轮导向组件2343、高压缩比组件2345和后端拉紧组件2344。前端固定组件2341固定在机器人本体21前端,并与血管鞘连接。前端固定组件2341与c 型管2342的一端连接,c型管2342的另一端穿过高压缩比组件2345并绕过双轮导向组件2343与后端拉紧组件2344连接。其中,前端固定组件2341包括c 型管固定件23411、万向节23412、套筒23413和罗伯特夹子23414。c型管固定件23411用于固定套设在导管237外部的c型管2342,c型管固定件23411一端与万向节23412的后端连接,另一端与c型管2342的一端连接。万向节23412 的前端与套筒23413连接,套筒23413通过罗伯特夹子23414与血管鞘连接。c 型管2342的另一端穿过高压缩比组件2345和双轮导向组件2343与后端拉紧组件2344连接。形成以c型管2342、弹簧23452、万向节23412、套筒23413为连续统一空腔,该空腔为导管237提供体外支撑。导管237依次穿过c型管固定件23411、万向节23412、套筒23413和血管鞘,进入人体动脉血管。其中,后端拉紧组件2344包括钩杆23441和连接螺柱23442。钩杆23441的自由端与机器人本后端固定,钩杆23441的另一端与连接螺柱23442固定,连接螺柱23442与 c型管2342的另一端连接。其中,双轮导向组件2343包括前滚轮23431、侧滚轮23432和滚轮支架23433。前滚轮23431设置在控制器固定座2311的前端内部,侧滚轮23432设置在控制器固定座2311的前端外侧面,侧滚轮23432通过滚轮支架23433与控制器固定座2311连接。具体地,前滚轮23431可转动地设置在控制器固定座2311内,侧滚轮23432可转动地设置在滚轮支架23433内。c型管2342绕过前滚轮23431和侧滚轮23432,其两端分别与前端固定组件2341和后端拉紧组件2344固定。其中,高压缩比组件2345包括前端弹簧压片23451、弹簧23452和后端弹簧压片23453。弹簧23452的两端分别与前端弹簧压片23451 和后端弹簧压片23453固定连接,前端弹簧压片23451与前端固定组件2341的c 型管固定件23411固定,后端弹簧压片23453与控制器固定座2311固定。控制器固定座2311、滚轮支架23433、侧滚轮23432和前滚轮23431形成的连续整体用于导引c型管2342的位置和开口。
73.导管237在体外大部分状态下是由c型管2342形成的固定腔体进行保护的,在长距离递送过程中,c型管2342有开口,导致导管237无法被保护。本发明将弹簧23452一端连接在后端弹簧压片23453和控制器固定座2311形成的腔体内部,另一端与前端固定组件2341连接。通过弹簧23452的压缩和拉伸来实现对c型管2342开口部分的保护,从而实现对导管237在体外长距离递送过程中的有效支撑和保护。同时,前端固定组件2341所形成的连续腔体,在罗伯特夹子23414的作用下将前端固定组件2341和血管鞘(通用医疗耗材,此处未体现) 相连接和固定,进而形成一个与人体血管相连接的有效通路。
74.本发明提供的导管控制器23,将导管齿轮2332与导管237进行连接,然后将导管237与y阀2321连接,然后将y阀2321安装在y阀快换底座232上,此时电机齿轮2331和导管齿
轮2332形成90
°
锥齿轮外啮合,电机旋转运动副能够有效传递到导管237上。后端协同运动状态为手指装配体235在舵机竖直往复运动的驱动下转化为水平往复运动,从而实现张口、闭合两种状态,进而实现对导丝227的夹紧、松开的动作。导管导向机构234能够对c型管2342开口部分进行保护,从而实现对导管237在体外长距离递送过程中的有效支撑和保护。导管控制器23整体在远端驱动平台组件2123的驱动下实现前后运动,以实现对导管237的前进、后撤的控制。
75.本发明的导管控制器23的工作原理,在导管237尾端套入导管齿轮2332,后将导管237原有的鲁尔接头与y阀鲁尔接头进行螺纹连接,三通阀亦是如此,如上建立了通用耗材整体,将该整体中的y阀2321放置在y阀快换底座232上,而y阀快换底座232放置在控制器固定座2311的固定位置上,从而:通用耗材整体、y阀快换底座232、控制器固定座2311形成有机械刚性连接的整体,在控制器固定座2311两侧均布两个导管船型连接夹236,导管船型连接夹236通过机械锁止的方式将上述有机械刚性连接的整体固定在远端驱动平台组件2123上,导管237的前进、后撤动作是由导管控制器23的前进、后撤进而带动与之相连接的导管237及通用耗材整体进行前进和后撤的动作,导管237的旋转由齿轮连杆2333所关联的导管控制器23中的盘式电机提供旋转驱动力进行顺时针和逆时针旋转,控制器固定座2311一端的手指装配体235的作用是在整体模块前进和后撤的间隙,通过手指装配体235将关联导丝227进行夹紧,从而实现导丝227 全程可控,增加手术的安全性和可靠性。
76.具体地,参照图19,支撑机械臂24包括机械臂本体241、底座242、大横臂 243、小横臂244、连接板245、水平位置调节机构246、升降调节机构247、旋转机构和角度调节机构248。机械臂本体241内设置升降调节机构247,以调整机械臂本体241的高度。机械臂本体241的下端通过水平位置调节机构246与底座242连接,以调整机械臂本体241的水平位置。大横臂243的两端通过旋转机构分别与机械臂本体241的上端和小横臂244的一端转动连接。小横臂244的另一端与连接板245通过角度调节机构248连接。连接板245与机器人本体21连接。其中,机械臂本体241的水平位置通过水平位置调节机构246调节,具体可以通过滑道和滑块实现,可以人工手动调节,也可以通过驱动机构调节。机械臂本体241的高度通过升降调节机构247调节,具体可以通过气弹簧实现。大横臂243和小横臂244的旋转角度均通过旋转机构调节,具体可以通过失电抱闸器实现,失电抱闸器可以与主端的辅助控制脚踏开关114连接,转动机械臂无需手部解锁,避免破坏无菌环境。失电抱闸器的原理是:1、线圈通电后:衔铁汇总电磁力作用下被吸向磁辊,进而使得摩擦盘松开,达到解除制动的目的;2、线圈断电后:在弹簧力作用下,摩擦盘和机座(或联结板)、衔铁之间产生摩擦力,进而通过齿轮套将传动轴制动。从而实现了机械臂闲时完全无电。连接板245的俯仰角度通过角度调节机构248调节,具体可以通过气弹簧实现。本发明的支撑机械臂24整体有五个自由度,分别为底座242的前后自由度、机械臂本体241 的高度升降、大横臂243的180
°
角度转动、小横臂244的180
°
角度转动及连接板 245的45
°
角度转动。
77.该系统的适应症为全脑动脉造影手术,在现有全脑动脉造影手术的术式中,由机器人代替医生进行导管、导丝在血管内的前进、后撤、旋转的相关介入手术中常见动作,通过管丝协同配合机制,将导管通过该系统递送至病灶位置,进而在高压注射器、dsa设备的辅助下,完成造影术。
78.在实际手术中:医生根据dsa影像判断导管、导丝在血管中的位置和接下来导管、
导丝要到达的位置,医生操作系统操作台上的操作手柄控制导管、导丝进行前进、后撤、旋转的动作。系统收集到医生操作台的信号后,将信号传递给上位机,上位机中运行的程序接收和分析信号后,将输入信号转换为输出控制信号传递给电控箱,电控箱接收指令并驱动从端执行装置的相关电机和传感器执行相关动作。从端机器人本体上的导管控制器和导丝控制器将实际执行前进、后撤、旋转的动作,来控制导管、导丝前进、后撤、旋转。同时医生通过dsa的实际影像判断导管、导丝在血管中的位置,并进行实时调整。
79.具体流程参见图2,通过上述循环,将导管、导丝通过整个系统的辅助,输送至病灶位置,结合dsa和高压注射器来完成全脑动脉造影手术的全过程。
80.在原有的手术过程中,医生需要左手把持y阀和导管,右手把持导丝。在实际手术过程中,通过左手的推送来推送导管,通过左手的旋拧y阀旋转部分来旋转导管,左手捏住导丝来完成对导丝的实时定位控制。右手往复推送来推送导丝,右手捏住导丝撵转来完成导丝的旋转。通过上述动作的实时配合,结合dsa影像的实时反馈来完成整个全脑动脉造影手术。
81.本方案完全模仿了医生在实际手术操作过程中的全部动作,实时复现和还原了医生的全部操作。
82.本方案中从端执行装置有两个模块,为导管控制器和导丝控制器,用于分别驱动导管、导丝的动作。导管控制器将y阀夹持在导管控制器中间,通过锥齿轮传动驱动y阀旋转部分来模拟左手旋转导管,通过导管控制器整体前进、后撤来模仿左手推送来推送导管,导管控制器后端手指装配体来模仿左手捏住导丝来完成对导丝的实时定位控制。导丝控制器先将导丝穿过导丝控制器的正中心,通过导丝控制器中的导丝夹紧机构的扭矩夹紧件和轴承的反复夹紧、松开来模仿右手捏住导丝撵转来完成导丝的旋转,通过导丝夹紧机构夹紧导丝和导丝控制器整体的左右推进来模仿右手往复推送来推送导丝。
83.在实际手术过程中,医生根据dsa影像判断导管、导丝在血管中的位置,并根据目标血管的位置进行路径规划,在dsa的实时影像下,医生通过控制主端操控台来完成对导管、导丝的前进、后撤、旋转动作,通过实时反馈来完成整个全脑动脉造影术。
84.具体操作时,操控台上的左侧手柄模仿医生左手,进行导管的各种控制,操控台上的右侧手柄模仿医生右手,进行导丝的各种控制。
85.向前推进左侧手柄为向前推送导管,向后拉手柄为向后撤导管,顺时针旋转旋钮为顺时针旋转导管,逆时针旋转手柄为逆时针旋转导管。
86.向前推进右侧手柄为向前推送导丝,向后拉手柄为向后撤导丝,顺时针旋转旋钮为顺时针旋转导丝,逆时针旋转手柄为逆时针旋转导丝。
87.本发明的工作流程:使用时将机器人本体、支撑机械臂固定于手术床上并与手术床共同移动,调节支撑机械臂高度和角度以方便操作者手术。所有模块上电、开机,上位机启动程序,使设备处于正常状态。从端在医生的辅助下与血管鞘进行连接,建立血管通路。在dsa影像的引导下,医生操作系统主端对导管、导丝进行操作。从端对医生的操作做出相关执行,控制导管、导丝到达指定位置。具体为:操作者操作操控台发出操作指令,经连接的计算机软件转换,并驱动电控箱,电控箱中的控制导管的电机和控制导丝的电机分别带动对应的同步带,固定在同步带上的远端驱动平台组件和近端驱动平台组件在同步带的控制下运动,导管控制器和导丝控制器分别固定在远端驱动平台组件和近端驱动平台组件上,
在同步带的运动下实现了导管控制器上的导管和导丝控制器上的导丝的前进、后退以及旋转功能,整个运动过程,导管和导丝动作与操控手柄动作保持同步。
88.1)导管直线前推、后撤及旋转
89.当导管控制器对应的手柄做出前推、后撤动作时,导管控制器以固定速度进行导管的前推、后撤操作;当顺时针或逆时针旋拧手柄时,导管控制器同步进行导管的旋转操作。
90.2)导丝直线前推、后撤及旋转
91.当导丝控制器对应的手柄做出前推、后撤动作时,导丝控制器以固定速度进行导丝的前推、后撤操作;当顺时针或逆时针旋拧手柄时,导丝控制器同步进行导丝的旋转操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。