1.本发明属于燃料电池技术领域,具体是涉及一种多堆阴极气体供应系统、解耦控制器及控制方法。
背景技术:
2.近年来,随着我国产业结构和能源结构的不断调整优化,新型电力系统的建设也日趋完善,绿色低碳技术取得重大进展,尤其是燃料电池技术。除了在交通运输行业以外,燃料电池技术在电力行业也存在较大的发展空间和产业化前景。
3.燃料电池除了作为发动机以外,也可以通过多个燃料电池堆串并联使用的方式作为发电装置或发电站使用。虽然燃料电池具有环保、静音和转化效率高等优点,但是作为发电站使用时,阴极气体供应系统会存在受到环境影响的氧气分压和氧气浓度不足导致发电效率受影响等问题。
技术实现要素:
4.本发明主要是解决上述现有技术所存在的技术问题,提供一种多堆阴极气体供应系统、解耦控制器及控制方法。
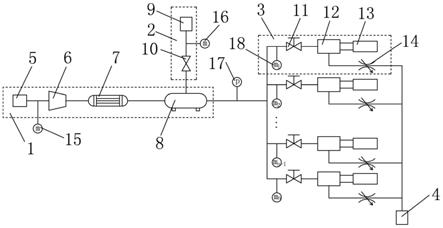
5.本发明的上述技术问题主要是通过下述技术方案得以解决的:一种多堆阴极气体供应系统,包括空气供应系统、氧气补偿系统、发电系统支路和阴极排气口,所述空气供应系统用于将空气进行压缩并储存于储气罐中,所述氧气补偿系统用于将外部提供的氧气输送进储气罐,以提高储气罐内阴极气体的氧气浓度,所述发电系统支路包括但不限于两个,且一个支路中只安装有一个燃料电池堆模块,发电系统支路将储气罐内的阴极气体加湿后在燃料电池堆中进行反应,经阴极排气口排出。
6.作为优选,所述空气供应系统包括依次连接设置的空气滤清器、空气压缩机、中冷器和储气罐,空气通过空气滤清器进入空气压缩机,由空气压缩机进行升压,再由中冷器进行降温后,输入储气罐储存。
7.作为优选,所述发电系统支路包括依次连接设置的关断阀、加湿器、燃料电池堆模块、以及与加湿器相连的背压阀,所述关断阀用于在某一发电系统支路燃料电池堆模块出现故障时控制对应支路的开闭,保护燃料电池堆模块和发电站安全;所述背压阀用于控制相对应的发电系统支路的入堆流量。
8.作为优选,还包括测量模块,所述测量模块包括设置在空气供应系统中的空气流量传感器、设置在氧气补偿系统中的氧气流量传感器、设置在储气罐和发电系统支路连接处的入堆压力传感器、以及设置在n个发电系统支路上的气体流量传感器。
9.作为优选,所述氧气补偿系统包括氧气输入口和比例阀,外部提供的氧气依次通过氧气输入口和比例阀进入储气罐。
10.作为优选,所述氧气补偿系统还包括氧气补偿控制器,所述氧气补偿控制器包括处理器、控制器本体和测量模块,所述处理器、控制器本体和氧气补偿系统依次连接,测量
模块中的空气流量传感器两端分别与处理器和空气供应系统连接,测量模块中的氧气流量传感器两端分别与控制器本体和氧气补偿系统连接,以实现氧气浓度的闭环控制。
11.作为优选,所述氧气补偿控制器的控制方法包括如下步骤:
12.步骤一,确认期望氧气浓度co;
13.步骤二,建立输入量为比例阀开度u
θo
,输出量为氧气流量y
qo
的氧气补偿系统模型;
14.步骤三,通过测量模块中的空气流量传感器测定空气供应系统的进气流量qa,通过测量模块中的氧气流量传感器测定氧气补偿系统的进气流量y
qo
;
15.步骤四,通过将测定的空气供应系统进气流量qa与期望氧气浓度co输入处理器中,得出期望氧气流量qo,所述的处理器为(co,qa)到qo的映射f
qo
,即
16.步骤五,通过将测定的氧气补偿系统的进气流量y
qo
与期望氧气流量qo进行比较,得出氧气流量差值e
qo
,再将氧气流量差值e
qo
作为反馈信号输入给控制器本体,进一步处理得出输出信号u
θo
;随后对氧气补偿系统进行控制;
17.重复步骤三至步骤五,实现对氧气浓度的闭环控制。
18.本发明还提供了一种多堆阴极气体供应系统解耦控制器,包括pid控制器、解耦装置 wd和测量模块,还包括所述的多堆阴极气体供应系统,所述pid控制器、解耦装置wd和多堆阴极气体供应系统依次连接,所述测量模块的两端分别与pid控制器和多堆阴极气体供应系统连接,以实现入堆压力和n个发电系统支路入堆流量的闭环解耦控制。
19.作为优选,解耦控制器的控制方法包括如下步骤:
20.步骤一,确认期望入堆压力和n个发电系统支路的期望入堆流量,并组成向量y0;
21.步骤二,对多堆燃料电池系统的阴极气体供应系统建立由空压机转速与n个发电系统支路的背压阀开度为输入量u,入堆压力和n个发电系统支路入堆流量为输出量y的n 1 输入n 1输出的模型;
22.步骤三,通过测量模块测定入堆压力和n个发电系统支路的入堆流量;
23.步骤四,通过将测定的入堆压力和n个发电系统支路的入堆流量与对应的期望值y0比较,得出差值e,再将差值e作为反馈信号输入给pid控制器进一步处理,pid控制器输出信号为v;pid控制器将处理后的输出信号v作为输入变量发送到解耦装置wd中,解耦装置wd将解耦后的输出量u作为输入量输入多堆阴极气体供应系统中进行入堆压力和n 个发电系统支路的入堆流量的控制;
24.重复步骤三和步骤四,实现对入堆压力和n个发电系统支路的入堆流量的闭环控制。
25.本发明具有的有益效果:
26.1、本发明通过在储气罐的旁通回路中通入氧气并与空气混合,提高空气供应系统中氧气的浓度,可以大大提高燃料电池发电站发电效率。
27.2、本发明可以有效解决燃料电池发电站在高海拔地区氧气分压和氧气浓度不足的问题,保证燃料电池发电站在高海波地区正常工作,促进燃料电池发电站的推广应用。
28.3、本发明采用解耦控制方法,解耦对象为从入堆压力和各个发电系统支路入堆流量到空压机转速和背压阀开度,该过程受环境影响较小,具有良好的环境适应性。
29.4、本发明对氧气补偿系统进行独立的pid控制,氧气浓度仅受到空气流量的影响,
不受到其他外部环境参数的干扰,具有优异的环境适应性与动态响应特性。
附图说明
30.图1是本发明的一种结构示意图;
31.图2是本发明氧气补偿控制器的一种结构示意图;
32.图3是本发明解耦控制器的一种结构示意图。
33.图中:1、空气供应系统;2、氧气补偿系统;3、发电系统支路;4、阴极排气口;5、空气滤清器;6、空气压缩机;7、中冷器;8、储气罐;9、氧气输入口;10、比例阀;11、关断阀;12、加湿器;13、燃料电池堆模块;14、背压阀;15、空气流量传感器;16、氧气流量传感器;17、入堆压力传感器;18、气体流量传感器。
具体实施方式
34.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
35.实施例:一种多堆阴极气体供应系统,如图1所示,包括空气供应系统、氧气补偿系统、发电系统支路和阴极排气口,所述空气供应系统用于将空气进行压缩并储存于储气罐中,所述氧气补偿系统用于将外部提供的氧气输送进储气罐,以提高储气罐内阴极气体的氧气浓度,所述发电系统支路包括但不限于两个,且一个支路中只安装有一个燃料电池堆模块。使用时,将氧气补偿系统中的氧气与空气供应系统中的空气混合,提高阴极气体的氧气浓度后并保持一定压力储存在储气罐中,随后受到燃料电池堆模块输出端背压阀的调节,由管路分别输入各发电系统支路中的加湿器进行加湿后,再进入燃料电池堆模块中进行反应,最终由阴极排气口排出。
36.所述空气供应系统包括依次连接设置的空气滤清器、空气压缩机、中冷器和储气罐,空气通过空气滤清器进入空气压缩机,由空气压缩机进行升压,再由中冷器进行降温后,输入储气罐储存。
37.所述发电系统支路包括依次连接设置的关断阀、加湿器、燃料电池堆模块、以及与加湿器相连的背压阀,所述关断阀用于在某一发电系统支路燃料电池堆模块出现故障时控制对应支路的开闭,保护燃料电池堆模块和发电站安全;所述背压阀用于控制相对应的发电系统支路的入堆流量。
38.所述氧气补偿系统包括氧气输入口和比例阀,外部提供的氧气依次通过氧气输入口和比例阀进入储气罐,通过控制比例阀的开度,调整进入储气罐的氧气流量。
39.上述阴极气体供应系统还包括测量模块,所述测量模块包括设置在空气供应系统中的空气流量传感器、设置在氧气补偿系统中的氧气流量传感器、设置在储气罐和发电系统支路连接处的入堆压力传感器、以及设置在n个发电系统支路上的气体流量传感器。
40.如图2所示,所述氧气补偿系统还包括氧气补偿控制器,所述氧气补偿控制器包括处理器、控制器本体和测量模块,所述处理器、控制器本体和氧气补偿系统依次连接,测量模块中的空气流量传感器两端分别与处理器和空气供应系统连接,测量模块中的氧气流量传感器两端分别与控制器本体和氧气补偿系统连接,从而实现氧气浓度的闭环控制。
41.所述氧气补偿控制器的控制方法包括如下步骤:
42.步骤一,确认期望氧气浓度co;
43.步骤二,建立输入量为比例阀开度u
θo
,输出量为氧气流量y
qo
的氧气补偿系统模型;
44.步骤三,通过测量模块中的空气流量传感器测定空气供应系统的进气流量qa,通过测量模块中的氧气流量传感器测定氧气补偿系统的进气流量y
qo
;
45.步骤四,通过将测定的空气供应系统进气流量qa与期望氧气浓度co输入处理器中,得出期望氧气流量qo,所述的处理器为(co,qa)到qo的映射f
qo
,即
46.步骤五,通过将测定的氧气补偿系统的进气流量y
qo
与期望氧气流量qo进行比较,得出氧气流量差值e
qo
,再将氧气流量差值e
qo
作为反馈信号输入给控制器本体,进一步处理得出输出信号u
θo
;随后对氧气补偿系统进行控制;
47.重复步骤三至步骤五,实现对氧气浓度的闭环控制。
48.进一步的,在步骤二中,氧气补偿系统模型的公式如下:
49.y
qo
=go·uθo
50.式中,go为输入量与输出量之间的传递函数;
51.进一步的,在步骤五中,控制器本体为e
qo
到u
θo
的映射f
uθo
,即
52.本发明还提供了一种多堆阴极气体供应系统解耦控制器,如图3所示,包括pid控制器、解耦装置wd和测量模块,还包括上述多堆阴极气体供应系统,所述pid控制器、解耦装置wd和多堆阴极气体供应系统依次连接,所述测量模块的两端分别与pid控制器和多堆阴极气体供应系统连接,从而实现入堆压力和n个发电系统支路入堆流量的闭环解耦控制。
53.解耦控制器的控制方法包括如下步骤:
54.步骤一,确认期望入堆压力和n个发电系统支路的期望入堆流量,并组成向量y0;
55.步骤二,对多堆阴极气体供应系统建立由空压机转速与n个发电系统支路的背压阀开度为输入量u,入堆压力和n个发电系统支路入堆流量为输出量y的n 1输入n 1输出的模型;
56.步骤三,通过测量模块测定入堆压力和n个发电系统支路的入堆流量;
57.步骤四,通过将测定的入堆压力和n个发电系统支路的入堆流量与对应的期望值y0比较,得出差值e,再将差值e作为反馈信号输入给pid控制器进一步处理,pid控制器输出信号为v;pid控制器将处理后的输出信号v作为输入变量发送到解耦装置wd中,解耦装置wd将解耦后的输出量u作为输入量输入多堆阴极气体供应系统中进行入堆压力和 n个发电系统支路的入堆流量的控制;
58.重复步骤三和步骤四,实现对入堆压力和n个发电系统支路的入堆流量的闭环控制。
59.进一步的,在步骤一中,向量y0如下所示:
60.y0=[p
0 q
10 q
20
ꢀ…ꢀqn0
]
t
[0061]
式中,p0表示期望入堆压力,q
10
、q
20
、
…
、q
n0
分别表示n个发电系统支路的期望入堆流量;
[0062]
进一步的,在步骤二中,向量u和y向量分别如下表示:
[0063]
u=[u
n u
θ1 u
θ2
ꢀ…ꢀuθn
]
t
[0064]
式中,un表示空压机转速,u
θ1
、u
θ2
、
…
、u
θn
分别表示n个发电系统支路的背压阀开
度;
[0065]
y=[p q
1 q2ꢀ…ꢀqn
]
t
[0066]
式中,p表示入堆压力,q1、q2、
…
、qn分别表示n个发电系统支路的入堆流量;
[0067]
进一步的,在步骤二中,n 1输入n 1输出的模型的公式如下:
[0068]
y=g
·u[0069]
式中,g为n 1个输入量与n 1个输出量之间的传递函数矩阵;
[0070]
进一步的,在步骤四中,e为期望值与观测值的差值,具有如下所示:
[0071]
e=[e
p e
q1 e
q2
ꢀ…ꢀeqn
]
t
[0072]
式中,e
p
表示入堆压力差值,e
q1
、e
q2
、
…
、e
qn
分别表示n个发电系统支路的入堆流量差值;
[0073]
进一步的,在步骤四中,pid控制的输出信号v如下所示:
[0074]
v=[v
p v
q1 v
q2
ꢀ…ꢀvqn
]
t
[0075]
式中,v
p
表示对入堆压力的控制信号,v
q1
、v
q2
、
…
、v
qn
分别表示对n个发电系统支路的入堆流量的控制信号;
[0076]
进一步的,在步骤四中,pid控制器输出信号v中的v
p
的方程为:
[0077][0078]
其中,k
pp
为方程中的比例控制参数,k
pi
为方程中的积分控制参数,k
pd
为方程中的微分控制参数;
[0079]
进一步的,在步骤四中,pid控制器输出信号v中的v
qi
(i=1、2
…
、n)方程为:
[0080][0081]
其中,k
qip
为方程中的比例控制参数,k
qii
为方程中的积分控制参数,k
qid
为方程中的微分控制参数;
[0082]
进一步的,解耦装置wd的输入量v与输出量u之间的关系如下所示:
[0083]
u=wd·v[0084]
进一步的,多堆阴极气体供应系统的输出量y与pid控制器输出信号v之间的关系式如下所示:
[0085]
y=g
·
wd·v[0086]
其中,为对角传递函数矩阵。
[0087]
最后,应当指出,以上实施例仅是本发明较有代表性的例子。显然,本发明不限于上述实施例,还可以有许多变形。凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均应认为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。