1.本技术属于飞行控制技术领域,特别涉及一种飞机倒飞状态的仿真模型构建方法。
背景技术:
2.飞机的空中飞行状态包括正飞状态和倒飞状态,尤其是高机动性飞机在进行机动动作时会频繁进入倒飞状态,因此对倒飞状态的动力学仿真分析具有重要意义。
3.飞机的倒飞状态一般有两种使用情况,一种是虽然飞机姿态倒转,但仍然按正迎角进行飞行,如飞机筋斗机动、半滚倒转机动等,对于这种倒飞状态的仿真分析,属于正迎角稳定性和操纵性特性分析,仍按飞机正飞状态进行仿真分析即可;另一种情况是飞机姿态倒转并进行负迎角飞行,如飞机倒飞尾旋,对于这种倒飞状态的分析应根据飞机负迎角的操纵性和稳定性进行分析。
4.在常规飞行仿真分析中,飞机动力学模型是基于飞机正飞状态定义进行建立的,即基于飞机的正迎角特性进行建立的,仿真程序的初始配平必须在正迎角条件下进行。这种基于六自由度动力学建立的非线性仿真模型虽然可以对飞机倒飞状态进行仿真,但由于受仿真模型初始条件的约束限制,初始仿真只能从正飞状态开始,在仿真过程中进行机动操纵,使飞机进入倒飞状态,然后进行仿真分析。这样的分析方法不但影响仿真效率,而且很难对典型状态进行量化考核分析,因此有必要寻求一种简便的倒飞状态仿真分析方法。
技术实现要素:
5.本技术的目的是提供了一种飞机倒飞状态的仿真模型构建方法,以解决或减轻背景技术中的至少一个问题。
6.本技术提供了一种飞机倒飞状态的仿真模型构建方法,包括:
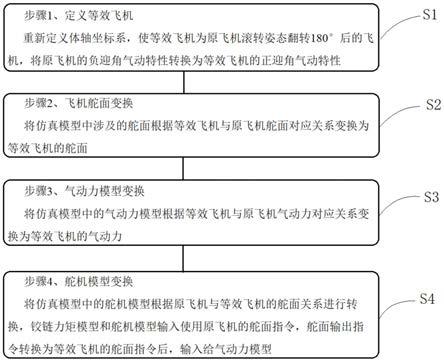
7.步骤1、定义等效飞机
8.重新定义体轴坐标系,使等效飞机为原飞机滚转姿态翻转180
°
后的飞机,将原飞机的负迎角气动特性转换为等效飞机的正迎角气动特性;
9.步骤2、飞机舵面变换
10.将仿真模型中涉及的舵面根据等效飞机与原飞机舵面对应关系变换为等效飞机的舵面;
11.步骤3、气动力模型变换
12.将仿真模型中的气动力模型根据等效飞机与原飞机气动力对应关系变换为等效飞机的气动力;
13.步骤4、舵机模型变换
14.将仿真模型中的舵机模型根据原飞机与等效飞机的舵面关系进行转换,铰链力矩模型和舵机模型输入使用原飞机的舵面指令,舵面输出指令转换为等效飞机的舵面指令后,输入给气动力模型。
15.进一步的,重新定义机体轴坐标系后,坐标关系如下:
16.x
t等效飞机
=x
t原飞机
17.y
t等效飞机
=-y
t原飞机
18.z
t等效飞机
=-z
t原飞机
19.式中,x
t原飞机
为原飞机飞机体轴x方向;y
t原飞机
为原飞机飞机体轴y方向;z
t原飞机
为原飞机飞机体轴z方向;x
t等效飞机
为等效飞机飞机体轴x方向;y
t等效飞机
为等效飞机飞机体轴y方向;z
t等效飞机
为等效飞机飞机体轴z方向;
20.等效飞机和原飞机的三轴力矩对应关系满足如下:
21.m
x等效飞机
=m
x原飞机
22.m
y等效飞机
=-m
y原飞机
23.m
z等效飞机
=-m
z原飞机
24.式中,m
x原飞机
为原飞机滚转力矩;m
y原飞机
为原飞机偏航力矩;m
z原飞机
为原飞机俯仰力矩;m
x等效飞机
为等效飞机滚转力矩;m
y等效飞机
为等效飞机偏航力矩;m
z等效飞机
为等效飞机俯仰力矩。
25.进一步的,所述涉及的舵面包括飞机副翼、飞机方向舵与飞机平尾。
26.进一步的,所述等效飞机的飞机副翼与原飞机的飞机副翼的对应关系为:
27.δ
xr
=-δ
′
xl
,δ
xl
=-δ
′
xr
28.式中,δ
xr
为等效飞机右副翼偏度;δ
xl
为等效飞机左副翼偏度;δ
′
xr
为原飞机右副翼偏度;δ
′
xl
为原飞机左副翼偏度。
29.进一步的,所述等效飞机的飞机方向舵与原飞机的飞机方向舵的对应关系为:
30.δ
yr
=-δ
′
yl
,δ
yl
=-δ
′
yr
31.式中,δ
yr
为等效飞机右方向舵偏度;δ
yl
为等效飞机左方向舵偏度;δ
‘
yr
为原飞机右方向舵偏度;δ’yl
为原飞机左方向舵偏度。
32.进一步的,所述等效飞机的飞机平尾与原飞机的飞机平尾的对应关系为:
33.δ
zr
=-δ
′
zl
,δ
zl
=-δ
′
zr
34.式中,δ
zr
为等效飞机右平尾偏度;δ
zl
为等效飞机左平尾偏度;δ
′
zr
为原飞机右平尾偏度;δ
′
zl
为原飞机左平尾偏度。
35.进一步的,所述等效飞机与原飞机的气动力关系为:
36.α
原飞机
=-α
等效飞机
37.β
原飞机
=-β
等效飞机
38.δ
x原飞机
=δ
x等效飞机
39.δ
y原飞机
=-δ
y等效飞机
40.δ
z原飞机
=-δ
z等效飞机
41.c
y原飞机
=-c
y等效飞机
42.c
x原飞机
=c
x等效飞机
43.c
z原飞机
=-c
z等效飞机
44.m
x原飞机
=m
x等效飞机
45.m
y原飞机
=-m
y等效飞机
46.m
z原飞机
=m
z等效飞机
47.式中,α
原飞机
为原飞机迎角;β
原飞机
为原飞机侧滑角;δ
x原飞机
为原飞机副翼偏度;δ
y原飞机
为
原飞机方向舵偏度;δ
z原飞机
为原飞机平尾舵偏度;c
y原飞机
为原飞机升力系数;c
x原飞机
为原飞机阻力系数;c
z原飞机
为原飞机侧力系数;m
x原飞机
为原飞机滚转力矩系数;m
y原飞机
为原飞机偏航力矩系数;m
z原飞机
为原飞机俯仰力矩系数;
48.α
等效飞机
为等效飞机迎角;β
等效飞机
为等效飞机侧滑角;δ
x等效飞机
为等效飞机副翼偏度;δ
y等效飞机
为等效飞机方向舵偏度;δ
z等效飞机
为等效飞机平尾舵偏度;c
y等效飞机
为等效飞机升力系数;c
x等效飞机
为等效飞机阻力系数;c
z等效飞机
为等效飞机侧力系数;m
x等效飞机
为等效飞机滚转力矩系数;m
y等效飞机
为等效飞机偏航力矩系数;m
z等效飞机
为等效飞机俯仰力矩系数。
49.本技术的方法基于等效飞机对原飞机气动力进行等效转换,使用基于正飞的仿真环境进行仿真模拟,在获得相同的飞机动力学特性时,仿真设置简便,避免了直接分析负迎角条件下飞机稳定性和操纵性的困难。
附图说明
50.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
51.图1为本技术的飞机倒飞状态的仿真模型构建方法流程图。
52.图2为飞机正飞与倒飞的迎角对应关系示意图。
53.图3为飞机正飞与倒飞的侧滑角对应关系示意图。
具体实施方式
54.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
55.如图1所示,本技术提供的飞机倒飞状态的仿真模型构建方法具体包括如下步骤:
56.1、定义等效飞机
57.如图1所示,首先重新定义体轴坐标系,定义等效飞机为原飞机滚转姿态翻转180
°
后的飞机,通过重新定义体轴坐标系,可将原飞机的负迎角气动特性转换为等效飞机的正迎角气动特性。
58.重新定义的机体坐标系与原机体坐标系具有如下关系:
59.x
t等效飞机
=x
t原飞机
60.y
t等效飞机
=-y
t原飞机
61.z
t等效飞机
=-z
t原飞机
。
62.等效飞机和原飞机的三轴力矩对应关系转变为:
63.m
x等效飞机
=m
x原飞机
64.m
y等效飞机
=-m
y原飞机
65.m
z等效飞机
=-m
z原飞机
。
66.2、飞机舵面变换
67.将仿真模型中涉及的舵面或指令参数根据等效飞机与原飞机舵向对应关系变换为等效飞机的舵面。
68.其中,上述舵面包括包括飞机副翼、飞机方向舵与飞机平尾。
69.等效飞机与原飞机副翼的对应关系为:δ
xr
=-δ
′
xl
,δ
xl
=-δ
′
xr
。这样,如果原飞机左
滚转:δ
xr
>0,δ
xl
<0,等效飞机对应的舵面为:δ
‘
xr
>0,δ
‘
xl
<0左滚转,与原飞机操纵性一致。
70.等效飞机与原飞机方向舵的对应关系为:δ
yr
=-δ
′
yl
,δ
yl
=-δ
′
yr
,这样,如果原飞机左偏航:δ
yr
<0,δ
yl
<0,等效飞机对应的舵面为:δ
‘
yr
>0,δ
‘
yl
>0左偏航,与原飞机操纵性一致。
71.等效飞机与原飞机平尾的对应关系为:δ
zr
=-δ
′
zl
,δ
zl
=-δ
′
zr
,这样,如果原飞机下俯:δ
zr
>0,δ
zl
>0,等效飞机对应的舵面为:δ
‘
zr
<0,δ
‘
zl
<0上仰,与原飞机操纵性一致。
72.3、气动力模型变换
73.将仿真模型中的气动力模型根据等效飞机与原飞机气动力对应关系变换为等效飞机的气动力。
74.具体的,原飞机气动力模型输入参数中,迎角α
原飞机
=-α
等效飞机
,侧滑角β
原飞机
=-β
等效飞机
,副翼δ
x原飞机
=δ
x等效飞机
,方向舵δ
y原飞机
=-δ
y等效飞机
,平尾δ
z原飞机
=-δ
z等效飞机
。
75.原飞机气动力模型输出参数中:升力c
y原飞机
=-c
y等效飞机
,阻力c
x原飞机
=c
x等效飞机
,侧向力c
z原飞机
=-c
z等效飞机
,滚转力矩系数m
x原飞机
=m
x等效飞机
,偏航力矩系数m
y原飞机
=-m
y等效飞机
,俯仰力矩系数,m
z原飞机
=m
z等效飞机
。
76.4、舵机模型变换
77.控制律解算出的舵面指令,传输至舵机模型时,根据原飞机与等效飞机的舵面关系进行转换,俯仰方向的平尾指令δz变换为δ
zc
=δ
zrc
=δ
zlc
,经过步骤2的变换为原飞机舵面指令,进入相应的舵机模型,舵机输出指令进入飞机铰链力矩模型作为模型的舵面输入值,铰链力矩模型的迎角和侧滑角输入为迎角α
原飞机
=-α
等效飞机
,侧滑角β
原飞机
=-β
等效飞机
,铰链力矩的输出进入舵机模型作为反馈;舵机的舵面输出指令δ
zr舵机
,δ
zr舵机
通过步骤2的变换转换为等效飞机的舵面输出指令,进入气动力模型进行解算飞机的气动力和气动力矩。
78.本发明提出的飞机倒飞状态的仿真模型构建方法通过对飞机坐标轴变换可把分析飞机倒飞负迎角问题转换为分析正飞正迎角问题,有效解决了仿真初值设置问题,并且可以利用基于正飞状态建立的线化小扰动理论对倒飞进行稳定性和操纵性性分析。
79.由于现有的分析飞机倒飞稳定性和可控性的分析方法主要为非线性仿真分析,首先从飞机正飞仿真开始进行机动设置才能进入倒飞阶段,分析方法单一,仿真设置环节复杂,而本方法基于等效飞机对原飞机气动力进行等效转换,使用基于正飞的仿真环境进行仿真模拟,在获得相同的飞机动力学特性时,仿真设置简便,避免了直接分析负迎角条件下飞机稳定性和操纵性的困难。
80.另外,对飞机稳定性和操纵性的分析理论都是建立在正迎角基础上进行分析的,而且分析飞机稳定性和操纵性首先需要进行配平计算,在配平基础上进行线化小扰动分析,这些理论都是建立在正飞基础上进行,使用本方法可把分析负迎角下的飞机稳定性和操纵性问题,转化为分析正迎角状态下的特性,可直接进行配平计算和线化小扰动分析。
81.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
82.符号说明:
83.x
t
为飞机体轴x方向;
84.y
t
为飞机体轴y方向;
85.z
t
为飞机体轴z方向;
86.m
x
为滚转力矩;
87.my为偏航力矩;
88.mz为俯仰力矩;
89.δ
xr
为右副翼偏度;
90.δ
xl
为左副翼偏度;
91.δ
yr
为右方向舵偏度;
92.δ
yl
为左方向舵偏度;
93.δ
zr
为右平尾偏度;
94.δ
zl
为左平尾偏度;
95.α为迎角;
96.β为侧滑角;
97.cy为升力系数;
98.c
x
为阻力系数;
99.cz为侧力系数;
100.m
x
为滚转力矩系数;
101.my为偏航力矩系数;
102.mz为俯仰力矩系数;
103.其中,角标原飞机表示原飞机相应参数,角标等效飞机表示等效飞机相应参数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。