用于飞行时间估计的方法和设备
1.相关申请的交叉引用
2.本技术要求于2020年10月21日提交的意大利专利申请no.102020000024874的优先权,该申请通过引用并入此文。
技术领域
3.本发明涉及一种用于超声飞行时间(tof)估计的设备(下文中称为tof设备)以及由该tof设备实现的对应方法。
背景技术:
4.根据超声tof估计原理,超声信号(下文中称为超声源信号)由tof设备生成并且向目标体发射,通过击中目标体的超声源信号的反射而源自于目标体的对应的超声信号(下文中称为超声回波信号)在tof设备处被接收,并且tof估计被确定为从超声源信号的发射到超声回波信号的接收所经过的时间。
5.在典型应用中,例如,在用于障碍物检测的应用中,tof设备可以被配置为例如基于tof估计来确定指示tof设备与目标体之间的距离的距离估计。
6.tof设备的输出可以是距离估计,和/或距离估计可以是基于距离估计的附加信息(诸如,位移信息、水平信息、材料信息、结构信息、振动信息和医疗诊断信息)的一部分。
7.根据已知实现,tof估计基于卡尔曼滤波器,卡尔曼滤波器是一种算法,在给定一组测量量的情况下,该算法通过递归处理来生成期望量的最佳估计。
8.扩展卡尔曼滤波器也是已知的,其适用于非线性系统。基本上,扩展卡尔曼滤波器通过雅可比计算来提供非线性系统的线性化。
9.无迹卡尔曼滤波器也是已知的,其也适用于非线性系统。基本上,无迹卡尔曼滤波器提供误差的概率分布的线性化。
10.目前,基于无迹卡尔曼滤波器的tof估计是优选的。
技术实现要素:
11.申请人已经理解,基于无迹卡尔曼滤波器的tof估计具有一些缺点。
12.例如,申请人已经理解,无迹卡尔曼滤波器的性能与大量参数(包括与超声回波信号的获取相关联的参数和无迹卡尔曼滤波器的参数)的有效校准密切相关。
13.由于需要被校准的参数众多并且这些参数的校准几乎总是根据设计人员的经验手动完成,因此,无迹卡尔曼滤波器的性能可能经常低于预期。
14.此外,申请人还理解,在tof设备寿命期间,tof估计也可能受到外部条件(诸如环境条件)的影响。例如,空气温度、湿度、气压、空气湍流、外部噪声的变化可能会严重影响超声信号采集,因此,由于外界条件的变化可能导致参数校准不充分。
15.最后但并非最不重要的是,申请人已经理解,当前的tof估计方法的高计算复杂度不允许在可用微控制器中有效实现。
16.申请人已面临上述问题,并且已设计一种用于tof估计的方法和对应的tof设备,以允许轻松且动态地调整(即,调节或更新或改进或校准)与所获取的超声回波信号的处理相关联的参数和无迹卡尔曼滤波器的参数。
17.例如,本发明的一个方面涉及一种方法,该方法用于提供由设备发射的超声信号与由被该超声信号击中的目标对象返回并且在该设备处被接收的超声回波信号之间的飞行时间的估计。该方法可以包括获取该超声回波信号从而获得电回波信号。该方法可以包括确定该电回波信号的噪声功率。该方法可以包括确定指示该电回波信号的包络的包络信号。该方法可以包括基于至少一个操作参数确定该包络信号的一部分,所述至少一个操作参数可以根据粒子群优化确定。该方法可以包括根据无迹卡尔曼滤波器处理该包络信号的该部分和该电回波信号的噪声功率以获取该包络信号的估计;该包络信号的估计可以是从该包络信号的该部分重新生成的包络信号的重新生成版本;所述处理可以例如基于根据粒子群优化确定的至少一个无迹卡尔曼滤波器参数(ukfpk)。该方法可以包括根据该包络信号的估计提供飞行时间的估计。
18.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,该方法包括确定估计误差。粒子群优化可以基于所述估计误差。
19.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,所述确定估计误差包括确定该包络信号的估计与该包络信号之间的差。
20.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,该方法包括基于所述飞行时间的估计确定指示该目标对象与该设备之间的距离的距离估计。所述确定估计误差可以包括确定该距离估计与所述距离之间的差。
21.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,所述确定包络信号包括对该电回波信号执行希尔伯特变换。
22.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,该包络信号的该部分以该包络信号的最大值为中心。
23.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,所述处理该包络信号的操作部分包括提供重新生成的包络信号。
24.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,所述至少一个操作参数包括以下中的至少一项:
25.指示该包络信号的该部分在时间上的最大长度的操作参数,以及
26.指示该包络信号的该部分在时间上的优化长度的操作参数,该优化长度小于该最大长度。
27.根据一个实施例,其特征是对前述实施例中的任何一个的一个或多个特征的补充或替代,所述至少一个无迹卡尔曼滤波器参数包括以下中的至少一项:
28.评估参数,提供飞行时间的粗略估计;
29.控制参数,用于控制sigma点围绕平均状态值的扩展;以及
30.校正参数,提供对该电回波信号的噪声功率的校正。
31.本发明的另一方面涉及一种设备,该设备用于提供由所述设备发射的超声信号与由被所述超声信号击中的目标对象返回并且在所述设备处被接收的超声回波信号之间的飞行时间的估计。该设备可以包括用于获取该超声回波信号从而获得电回波信号的调节和
转换系统。该设备可以包括用于确定电回波信号的噪声功率的模块。该设备可以包括用于确定指示该电回波信号的包络的包络信号的模块。该设备可以包括用于基于至少一个操作参数确定该包络信号的一部分的模块;所述至少一个操作参数可以根据粒子群优化来确定。该设备可以包括用于根据无迹卡尔曼滤波器处理该包络信号的该部分和电回波信号的噪声功率以获得该包络信号的估计的模块;该包络信号的估计可以是从该包络信号的该部分重新生成的包络信号的重新生成版本;所述处理可以基于根据粒子群优化确定的至少一个无迹卡尔曼滤波器参数。该设备可以包括用于根据该包络信号的估计提供飞行时间的估计的模块。
32.本发明的另一方面涉及一种包括这样的设备(或多个这样的设备)的电子系统。
附图说明
33.本公开的这些以及其他特征和优点将通过其一些示例性和非限制性实施例的以下描述变得很清楚;为了更好的理解,以下描述应当参考附图进行阅读,其中:
34.图1示意性地示出了根据本公开的实施例的用于超声飞行时间估计的设备;
35.图2a和2b示出了根据本公开的相应实施例的方法的活动图;
36.图3示出了根据本公开的实施例的包括图1的设备的电子系统的简化框图;以及
37.图4和5示出了根据本公开的相应实施例的相应方法的活动图。
具体实施方式
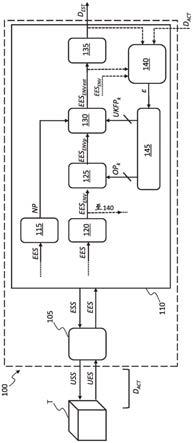
38.参考附图,图1示意性地示出了根据本公开的实施例的用于提供超声飞行时间估计(下文中称为tof估计)的设备(下文中称为tof设备)100。tof设备100被配置为实现用于提供tof估计的方法(下文中称为tof方法)。
39.在下文中,当tof设备和tof方法的一个或多个特征通过措辞“根据一个实施例”来介绍时,除非另有说明和/或除非特征组合之间存在明显的不兼容,否则它们将被解释为先前介绍的任何特征的补充特征或替代特征。
40.在下文中,将仅示出和讨论被认为与理解本公开相关的tof设备100的组件(和由其执行的tof方法步骤),并且,为简洁起见,将有意省略tof设备100的其他已知的组件(和由其执行的tof方法步骤)。
41.根据超声飞行时间估计原理,超声信号(下文中称为超声源信号)uss由tof设备100生成并且向目标体t发射(目标体在tof设备100外部,即,不是tof设备100的一部分),通过击中目标体t的超声源信号uss的反射而源自于目标体t的对应的超声信号(下文中称为超声回波信号)ues在tof设备100处被接收,并且tof估计被确定(由tof设备100)为从超声源信号uss的发射到超声回波信号ues的接收所经过的时间。
42.根据一个实施例,tof设备100被配置为例如基于tof估计来确定指示tof设备100与目标体t之间的距离d
act
的距离估计d
est
。
43.根据一个实施例,tof设备100可以被配置为进一步例如基于tof估计和/或距离估计d
est
来确定一个或多个附加信息。根据一个实施例,如下文中更好地讨论的,tof设备100可以是旨在基于由tof设备100提供的tof估计和/或距离估计d
est
来确定附加信息的电子系统的一部分。
44.附加信息的示例包括但不限于位移信息、水平信息、材料信息、结构信息、振动信息和医疗诊断信息。
45.出于本公开的目的,目标体t(其不是tof设备100的一部分)包括具有质量的物理对象。目标体的示例包括但不限于生物(诸如,人、动物和树木)或其部分、以及无生命物体(诸如,建筑物和车辆)或其部分。
46.根据一个实施例,tof设备100包括超声换能器105。根据一个实施例,超声换能器105包括压电超声换能器或电容超声换能器。
47.根据一个实施例,超声换能器105被配置为将电源信号ess(例如,脉宽调制脉冲序列)转换为超声源信号uss,并且对来自目标体t的超声回波信号ues进行转换以获得对应的电回波信号ees。
48.根据一个实施例,电源信号ess和电回波信号ees是数字信号,超声换能器105例如包括调节和转换系统(未示出),该调节和转换系统用于从(数字)电源信号ess获取要转换为电回波信号ees的模拟超声源信号,并且用于从转换后的超声回波信号中获取(数字)电回波信号ees。
49.根据一个实施例,tof设备100包括处理单元110(例如,微控制器和/或微处理器),该处理单元110电耦合到超声换能器105,用于向其提供电源信号ess并且用于从其接收电回波信号ees。
50.在下文中,将仅讨论被认为与理解本公开相关的处理单元110的相关模块,并且为了简洁起见,省略了相关模块的已知的和/或明显的变体。
51.术语“模块”在本文中旨在强调其功能(而不是实现)方面。实际上,在不失一般性的情况下,每个模块根据其功能可以由软件、硬件和/或其组合来实现。此外,模块(或至少其子集)也可以至少在概念上反映处理单元的物理结构。在任何情况下,应当理解,所示模块中的一个或多个可以一起集成在单个电子单元中。
52.根据一个实施例,处理单元110包括用于确定与电回波信号ees相关联的噪声功率np(或其指示)的模块115。
53.根据一个实施例,为了确定与电回波信号ees相关联的噪声功率np(或其指示),模块115被配置为根据傅立叶变换处理电回波信号ees。在本文的描述中,模块115也被称为傅立叶模块115。
54.根据一个实施例,处理单元110包括用于确定指示电回波信号的包络(例如,轮廓)的包络信号ees
env
的模块120。
55.根据一个实施例,为了确定包络信号ees
env
,模块120被配置为根据希尔伯特变换处理电回波信号ees。在本文的描述中,模块120也被称为希尔伯特模块120。
56.由于包络信号ees
env
的频率小于电回波信号ees的频率,因此,可以在不违反奈奎斯特请求的情况下以采样数/秒的形式适当地抽取包络信号ees
env
。因此,希尔伯特模块120在不丢失信息内容的情况下执行第一信号“稀释”,这确定了处理单元110的低计算请求。仅作为示例,电回波信号ees的频率可以约为400khz并且包络信号ees
env
的频率可以约为25khz。
57.根据一个实施例,处理单元110包括用于确定包络信号ees
env
的一部分的模块125。在本文的描述中,模块125也被称为部分模块125并且包络信号ees
env
的该部分也被称为包
络信号部分ees
envp
。
58.根据一个实施例,包络信号部分ees
envp
包括包络信号ees
env
的包括包络信号ees
env
的最大值的部分,即,位于最大值左侧的包络信号ees
env
的部分(下文中称为包络信号ees
env
的左侧部分)和位于最大值右侧的包络信号ees
env
的部分(下文中称为包络信号ees
env
的右侧部分)。包络信号ees
env
的左侧部分和包络信号ees
env
的右侧部分可以具有相同的时间长度,例如,包络信号ees
env
的所述部分以包络信号ees
env
的所述最大值为中心,或者可以具有不同的时间长度,例如,包络信号ees
env
的所述部分不以包络信号ees
env
的所述最大值为中心。
59.由于包络信号部分ees
envp
是包络信号ees
env
的一部分,因此,包络信号部分ees
envp
可以被处理单元110的后续模块快速处理(以获得快速的tof估计,并且因此获得快速的距离估计d
est
)。因此,部分模块125在不丢失信息内容的情况下执行第二信号“稀释”,这确定了处理单元110的低计算请求。
60.由于处理单元110的低计算请求,因此,处理单元110可以是市场上可获得的常规微控制器。
61.根据一个实施例,包络信号部分ees
envp
是基于一个或多个操作参数确定的。
62.操作参数的示例包括但不限于:
63.指示包络信号ees
env
的左侧部分的最大长度的第一操作参数perc_l。换言之,第一操作参数perc_l指示包络信号ees
env
的左侧部分在横坐标轴上(即,在时间上)的允许范围,并且可以例如取决于处理单元110的后续模块的处理能力和/或其他设计选项;
64.指示包络信号ees
env
的右侧部分的最大长度的第二操作参数perc_u。换言之,第二操作参数perc_u指示包络信号ees
env
的右侧部分在横坐标轴上(即,在时间上)的允许范围,并且可以例如取决于处理单元110的后续模块的处理能力和/或其他设计选项(因此,第一操作参数和第二操作参数指示包络信号部分ees
envp
在时间上的最大长度);
65.指示包络信号ees
env
的左侧部分的优化长度的第三操作参数coeff1。换言之,第三操作参数coeff1指示包络信号ees
env
的左侧部分在横坐标轴上(即,在时间上)的优化范围(小于允许范围)。与允许范围相比,包络信号ees
env
的左侧部分的优化长度可以进一步减少处理单元110的后续模块所请求的计算且不会丢失信息内容;
66.指示包络信号ees
env
的右侧部分的优化长度的第四操作参数coeff2。换言之,第四操作参数coeff2指示包络信号ees
env
的右侧部分在横坐标轴上的优化范围(小于允许范围)。因此,第三操作参数coeff1和第四操作参数coeff2指示包络信号部分ees
envp
在时间上的优化长度。与允许范围相比,包络信号ees
env
的右侧部分的优化长度可以进一步减少处理单元110的后续模块所请求的计算且不会丢失信息内容。
67.在下文中,当区分第一操作参数、第二操作参数、第三操作参数和第四操作参数与理解本公开无关时,操作参数将全局表示为opk,其中k表示tof方法的迭代次数,实际上,如下文中更好地讨论的,根据一个实施例,操作参数或至少其子集在tof方法的每次迭代时被调整或调节或更新。
68.根据一个实施例,操作参数或其子集根据粒子群优化被确定,如本文中所详细讨论的。
69.根据一个实施例,部分模块125(在下文中更好地讨论)被配置为通过在第一阶段
将第一操作参数perc_l和第二操作参数perc_u应用于包络信号ees
env
并且在第二阶段(第一阶段之后)将第三操作参数coeff1和第四操作参数coeff2应用于包络信号ees
env
(旨在优化包络信号部分ees
envp
的长度)来确定包络信号部分ees
envp
。
70.根据一个实施例,处理单元110包括用于根据无迹卡尔曼滤波器来处理包络信号部分ees
envp
和电回波信号ees的噪声功率np的模块130(这就是模块130在下文中将被称为ukf(“无迹卡尔曼滤波器”)模块130的原因)。
71.卡尔曼滤波器是一种算法,该算法使用随时间观察到的包含统计噪声和其他不准确性的一系列测量量,并且通过估计每个时间段内变量的联合概率分布来产生未知变量的估计,这些估计往往比单独基于单个测量量的估计更准确。
72.卡尔曼滤波器跟踪系统的估计状态以及估计的方差或不确定性。使用状态转换模型和测量量来更新估计。
73.该算法分两步工作。在预测步骤中,卡尔曼滤波器产生对当前状态变量的估计及其不确定性。一旦下一测量的结果(可能会受到一定量的误差的破坏)(包括随机噪声)被观察到,使用加权平均更新这些估计,其中,对确定性更高的估计给予更大的权重。该算法是递归的。其可以仅使用当前输入测量量和先前计算的状态及其不确定性矩阵实时运行;且不需要附加的过去的信息。
74.无迹卡尔曼滤波器是卡尔曼滤波器的推广,其适用于非线性系统。在ukf中,概率密度通过点的确定性采样来近似,这些点将基础分布表示为高斯分布。这些点的非线性变换(称为无迹变换)旨在作为后验分布的估计,然后,可以从变换后的样本中导出其矩。
75.根据一个实施例,ukf模块130被配置为基于一个或多个ukf参数来处理包络信号部分ees
envp
和电回波信号的噪声功率np(ukf参数或其子集根据粒子群优化来确定,如下文中更好地讨论的)。
76.ukf参数的示例包括但不限于提供tof估计的第一粗略评估(以便为ukf模块130提供良好起点)的评估参数(“to_md_capture”)、用于控制sigma点围绕平均状态值的扩展的控制参数(“kappa_p”)、以及提供对噪声功率np的校正的校正参数(“powernoisecorr”)。在一些实施例中,校正参数是例如要添加到与电回波信号ees相关联的噪声协方差矩阵的加性校正因子。换言之,“to_md_capture”参数指示用作飞行时间计算的起点的飞行时间的近似估计,并且与x_max_inv-3σ成比例,x_max_inv如下所述,并且σ是与近似包络信号部分ees
envp
的高斯曲线的标准偏差相关联的预定义值,“kappa_p”参数指示sigma点围绕ukf的状态变量的平均值的扩展。
77.如本文所述,ukf参数将全局表示为ukfpk,其中k表示tof方法的迭代次数。如本文所进一步讨论的,根据一个实施例,ukf参数在tof方法的每次迭代时被调整或调节或更新。
78.根据一个实施例,ukf模块130被配置为处理包络信号部分ees
envp
和电回波信号ees的噪声功率np以获得包络信号ees
env
的估计(下文中称为包络信号估计ees
envest
)。根据一个实施例,包络信号估计ees
envest
是从包络信号部分ees
envp
重新生成的、包络信号ees
env
的重新生成版本(参见例如2006年8月的ieee transactions oninstrumentation and measurement中的l.angrisani、a.baccigalupi、r.schiano lo moriello的“ultrasonic time-of-flight estimation through unscented kalman filter”)。
79.根据一个实施例,处理单元110包括用于根据包络信号估计ees
envest
来确定tof估
计的模块(下文中称为评估模块)135。
80.根据一个实施例,tof估计是基于对超声信号包络进行建模的以下离散时间表达式的(参见例如2006年8月的ieee transactions oninstrumentation and measurement中的l.angrisani、a.baccigalupi、r.schiano lo moriello的“ultrasonic time-of-flight estimation through unscented kalman filter”):
[0081][0082]
其中:
[0083]
a0是电回波信号ees的振幅;
[0084]
α和t是取决于所采用的超声换能器的参数;
[0085]
τ是tof估计,并且
[0086]
ts是采样周期。
[0087]
根据一个实施例,评估模块135被配置为根据tof估计来确定目标对象t与tof设备100之间的距离估计d
est
。
[0088]
根据一个实施例,处理单元110包括用于确定估计误差ε的模块(下文中称为误差模块)140。如下文中更好地讨论的,操作参数opk(或其子集)和ukf参数ukfpk(或其子集)根据接收估计误差ε作为输入的粒子群优化来确定。
[0089]
根据一个实施例,在误差模块140处确定的估计误差ε包括tof设备100与目标体t之间的距离估计d
est
与距离d
act
(即,实际距离)之间的差。根据以下讨论将能够更好地理解,该实施例允许在tof设备100的初步或校准阶段(即,在将tof设备100用作仪表(例如,测距仪)之前的阶段)迭代地调节、调整、更新或改进操作参数opk(或其子集)和ukf参数ukfpk(或其子集)。如下文中更好地讨论的,tof设备100的初步或校准阶段是通过tof方法(下文中称为“离线tof方法”)的实施例获取的,其中放置在已知距离d
act
处的已知目标体t用于设置当tof设备100用作仪表(例如,测距仪)时由该tof设备100随后使用的操作参数opk和ukf参数ukfpk。
[0090]
根据一个实施例,在误差模块140处确定的估计误差ε包括包络信号估计ees
envest
与包络信号ees
env
之间的差。根据以下讨论将更好地理解,该实施例允许在将tof设备100用作仪表(例如,测距仪)期间实时地迭代地调节、调整、更新或改进操作参数opk的子集和ukf参数ukfpk的子集。如下文中更好地讨论的,这是通过tof方法(下文中称为“在线tof方法”)的实施例获得的。
[0091]
根据一个实施例,tof设备100可以被配置为实现离线tof方法(在这种情况下,距离估计d
est
和距离d
act
在误差模块140处被接收)或在线tof方法(在这种情况下,包络信号ees
env
和包络信号估计ees
envest
在误差模块140处被接收)或离线tof方法和在线tof方法两者(例如,使用可以跟随离线tof方法的在线tof方法):实现离线tof方法和/或在线tof方法的可能性在图1中由与输入至误差模块140的距离估计d
est
、距离d
act
、包络信号ees
env
和包络信号估计ees
envest
相关联的虚线箭头概念性地表示。
[0092]
根据一个实施例,处理单元110包括模块(下文中称为群(swarm)模块)145,模块145用于根据粒子群优化并且基于随着误差模块140输入而接收到的估计误差ε来确定操作
参数opk(或操作参数opk的子集)和ukf参数ukfpk(或ukf参数ukfpk的子集)。
[0093]
粒子群优化是一种计算方法,该计算方法通过迭代地尝试改进与给定质量度量相关的候选解决方案来优化问题。它通过具有称为粒子的一组候选解决方案并且根据粒子的位置和速度上的简单数学公式在搜索空间中移动这些粒子来解决问题。每个粒子的移动受到其局部最佳已知位置的影响,但也会被引向搜索空间中的最佳已知位置,这些位置随着其他粒子找到更好位置而被更新。
[0094]
粒子群优化的主要等式如下:
[0095]ci,j
=c1r
1,j
(p
i,j
(t-1)-x
i,j
(t-1))
[0096]si,j
=c2r
2,j
(g
i,j
(t-1)-x
i,j
(t-1))
[0097]vi,j
(t)=wv
i,j
(t-1) c
i,j
s
i,j
[0098]
x
i,j
(t)=x
i,j
(t-1) vi,j(t)
[0099]
其中:
[0100]
p
i,j
是第i个粒子的局部最优;
[0101]gi,j
是当前邻域中第i个粒子的全局最优;
[0102]ci,j
是j维搜索空间中的第i认知参数;
[0103]si,j
是j维搜索空间中的第i社会参数;
[0104]vi,j
(t)是j维搜索空间中的第i个粒子的速度参数;
[0105]
x
i,j
(t)是j维搜索空间中的第i个粒子的位置(解决方案);
[0106]r1,j
、r
2,j
是[0,1]中的均匀分布的随机值;
[0107]
c1、c2是认知分量和社会分量两者的加速系数;以及
[0108]
w是旨在判断探索阶段和开发阶段的惯性权重。
[0109]
图2a示出了根据本公开的实施例的离线tof方法200a的活动图。
[0110]
根据一个实施例,离线tof方法200a通过存储在tof设备100中或由tof设备100可访问的适当软件指令和/或通过tof设备100的适当硬件/固件来实现。
[0111]
根据一个实施例,离线tof方法200a包括获取超声回波信号ues,从而获得对应的电回波信号ees(动作节点205)。根据一个实施例,在超声换能器105的调节和转换系统(未示出)处执行获取超声回波信号ues以获得对应的电回波信号ees。
[0112]
根据一个实施例,离线tof方法200a包括确定电回波信号ees的噪声功率np(动作节点210)。根据一个实施例,在处理单元110的傅立叶模块115处确定电回波信号ees的噪声功率np。
[0113]
根据一个实施例,离线tof方法200a包括确定包络信号ees
env
(动作节点215)。根据一个实施例,在处理单元110的希尔伯特模块120处确定包络信号ees
env
。
[0114]
根据一个实施例,离线tof方法200a包括确定包络信号部分ees
envp
(动作节点220)。根据一个实施例,在处理单元110的部分模块125处确定包络信号部分ees
envp
。根据一个实施例,基于在当前第k次迭代之前的先前的第(k-1)次迭代中执行的粒子群优化产生的操作参数opk来确定包络信号部分ees
envp
。根据一个实施例,在离线tof方法200a第一次运行(k=0)时,其中尚未发生基于粒子群优化的操作参数调整,操作参数opk处于默认值,默认值是例如在制造商侧例如基于设计经验确定的。
[0115]
根据一个实施例,离线tof方法200a包括根据包络信号部分ees
envp
和噪声功率np确
定包络信号估计ees
envest
(动作节点225)。根据一个实施例,在处理单元110的ukf模块130处确定包络信号部分ees
envp
,如下面参考图4所更好地讨论的。根据一个实施例,基于在当前第k次迭代之前的先前的第(k-1)次迭代中执行的粒子群优化产生的ukf参数ukfpk来确定包络信号估计ees
envest
。根据一个实施例,在离线tof方法200a第一次运行(k=0)时,其中尚未发生基于粒子群优化的ukf参数调整,ukf参数ukfpk处于默认值,默认值是例如在制造商侧例如基于设计者经验确定的。
[0116]
根据一个实施例,离线tof方法200a包括根据包络信号估计ees
envest
确定tof估计并且根据tof估计确定距离估计d
est
(动作节点230)。根据一个实施例,在处理单元110的评估模块135处确定tof估计和距离估计d
est
。
[0117]
根据一个实施例,离线tof方法200a包括将估计误差ε确定为距离估计d
est
与距离d
act
之间的差(动作节点235a)。根据一个实施例,在处理单元110的误差模块140处确定估计误差ε。
[0118]
根据一个实施例,离线tof方法200a包括只要估计误差ε高于阈值估计误差ε
th
,就迭代地调节和改进操作参数opk和ukf参数ukfpk(或其子集)。根据一个实施例,如果估计误差ε高于阈值估计误差ε
th
(决策节点240的退出分支n),则后续迭代开始(k=k 1,动作节点245),并且在处理单元110的群模块145处基于随着误差模块140输入而接收到的估计误差ε并且基于粒子群优化调节操作参数opk和ukf参数ukfpk。
[0119]
根据一个实施例,只要估计误差ε高于阈值估计误差ε
th
,就重复节点220-250。
[0120]
回到决策节点240,根据一个实施例,如果估计误差ε低于阈值估计误差ε
th
(决策节点240的退出分支y),这表示操作参数opk和ukf参数ukfpk已经被优化,则适当地存储优化的操作参数opk和优化的ukf参数ukfpk(动作节点255)以用于离线tof方法200a的后续运行(或用于在线tof方法的随后运行),然后离线tof方法200a结束。
[0121]
离线tof方法在设计阶段可能很有用,在设计阶段,tof估计是以监督方式在已知测量条件下从一组信号中以高精度确定的。申请人已经通过实验确定,具有通过离线tof方法优化的操作和ukf参数的tof设备能够在0.30m至2m的距离内管理非常大量形状的超声回波信号,平均精度小于3mm。
[0122]
图2b示出了根据本公开的实施例的在线tof方法200b的活动图。
[0123]
根据一个实施例,在线tof方法200b通过存储在tof设备100中或由tof设备100可访问的适当软件指令和/或通过tof设备100的适当硬件/固件来实现。
[0124]
根据一个实施例,在线tof方法200b包括获取超声回波信号ues,从而获得对应的电回波信号ees(动作节点205)。根据一个实施例,在超声换能器105的调节和转换系统(未示出)处执行获取超声回波信号ues以获得对应的电回波信号ees。
[0125]
根据一个实施例,在线tof方法200b包括确定电回波信号ees的噪声功率np(动作节点210)。根据一个实施例,在处理单元110的傅立叶模块115处确定电回波信号ees的噪声功率np。
[0126]
根据一个实施例,在线tof方法200b包括确定包络信号ees
env
(动作节点215)。根据一个实施例,在处理单元110的希尔伯特模块120处确定包络信号ees
env
。
[0127]
根据一个实施例,在线tof方法200b包括确定包络信号部分ees
envp
(动作节点220)。根据一个实施例,在处理单元110的部分模块125处确定包络信号部分ees
envp
。根据一个实
施例,基于在当前第k次迭代之前的先前的第(k-1)次迭代中执行的粒子群优化产生的操作参数opk的子集来确定包络信号部分ees
envp
。根据一个实施例,在在线tof方法200b第一次运行(k=0)时,其中尚未发生基于粒子群优化的操作参数调整,操作参数opk的子集处于默认值,默认值是例如在制造商侧例如基于设计者经验确定的,或者在在线tof方法200b之前执行的离线tof方法(诸如,离线tof方法200a)处确定的。
[0128]
根据一个实施例,操作参数opk的子集包括但不限于第三操作参数coeff1和第四操作参数coeff2(即,指示包络信号ees
env
的左侧部分的优化长度和右侧部分的优化长度、并且因此指示包络信号部分ees
envp
在横坐标轴上的优化总长度的操作参数)。实际上,申请人已经通过实验确定,第一操作参数perc_l和第二操作参数perc_u(尤其是当它们在在线tof方法200b之前的离线tof方法(诸如,离线tof方法200a)期间被调整时)足够有效以允许标识(连同在在线方法200b期间调整的第三操作参数coeff1和第四操作参数coeff2)最佳包络信号部分ees
envp
。
[0129]
根据一个实施例,在线tof方法200b包括根据包络信号部分ees
envp
和噪声功率np来确定包络信号估计ees
envest
(动作节点225)。根据一个实施例,在处理单元110的ukf模块130处确定包络信号部分ees
envp
,如下面参考图4所更好地讨论的。根据一个实施例,基于在当前第k次迭代之前的先前的第(k-1)次迭代中执行的粒子群优化产生的ukf参数ukfpk的子集来确定包络信号估计ees
envest
。根据一个实施例,在在线tof方法200b第一次运行(k=0)时,其中尚未发生基于粒子群优化的ukf参数调整,ukf参数ukfpk的子集处于默认值,默认值是例如在制造商侧例如基于设计者经验确定的。
[0130]
根据一个实施例,ukf参数ukfpk的子集包括但不限于评估参数和控制参数。实际上,申请人已经通过实验确定,诸如校正参数等一些参数不影响(或基本上不影响)tof估计。因此,根据一个实施例,校正参数(尤其是当其在在线tof方法200b之前的离线tof方法(诸如,离线tof方法200a)期间被调整时)在在线tof方法200b期间不再被调整。
[0131]
根据一个实施例,在线tof方法200b包括将估计误差ε确定为包络信号估计ees
envest
与包络信号ees
env
之间的差(动作节点235b)。根据一个实施例,在处理单元110的误差模块140处确定估计误差ε。
[0132]
根据一个实施例,在线tof方法200b包括只要估计误差ε高于阈值估计误差ε
th
,就迭代地调节和改进操作参数opk的子集和ukf参数ukfpk的子集。根据一个实施例,如果估计误差ε高于阈值估计误差ε
th
(决策节点240的退出分支n),则后续迭代开始(k=k 1,动作节点245),并且在处理单元110的群模块145处基于随着误差模块140输入而接收到的估计误差ε并且基于粒子群优化调节操作参数opk的子集和ukf参数ukfpk的子集。
[0133]
根据一个实施例,只要估计误差ε高于阈值估计误差ε
th
,就重复节点220-250。
[0134]
回到决策节点240,根据一个实施例,如果估计误差ε低于阈值估计误差ε
th
(决策节点240的退出分支y),这表示操作参数opk的子集和ukf参数ukfpk的子集已经被优化,则根据包络信号估计ees
envest
(即,基于操作参数opk的优化子集和ukf参数ukfpk的优化子集确定的包络信号估计ees
envest
)来确定tof估计,并且根据tof估计来确定距离估计d
est
(动作节点230)。根据一个实施例,在处理单元110的评估模块135处确定tof估计和距离估计d
est
。
[0135]
根据一个实施例,适当地存储操作参数opk的优化子集和ukf参数ukfpk的优化子集(动作节点255)以用于在线tof方法200b的后续运行。
[0136]
在线tof方法提供动态和自动适应不同外部条件的tof估计。
[0137]
例如,离线tof方法200a和在线tof方法200b在训练数据集上执行,该训练数据集包括例如160个超声回波信号(例如,135个用于离线调整,25个用于测试在线调整),该160个超声回波信号指示目标对象t与tof设备100之间范围在大约0.3m到大约2m之间的距离并且以大约400ks/s的采样率被获取。特别地,用于测试在线调整的25个超声回波信号是在各种操作条件下(例如,可变温度、湿度、风速等)获取的。
[0138]
现在参考图3,图3示出了根据本公开的实施例的包括tof设备100(或多个tof设备100)的电子系统300(即,其一部分)的简化框图。
[0139]
根据一个实施例,电子系统300适用于电子装置。
[0140]
根据一个实施例,电子系统300包括控制器305(例如,一个或多个微处理器和/或一个或多个微控制器)。
[0141]
根据一个实施例,电子系统300包括输入/输出设备310(例如,键盘和/或屏幕)。输入/输出设备310可以例如用于生成和/或接收消息。输入/输出设备310可以例如被配置为接收/提供数字信号和/或模拟信号。
[0142]
根据一个实施例,电子系统300包括用于例如通过射频信号与无线通信网络(未示出)交换消息的无线接口315。无线接口的示例可以包括天线和无线收发器。
[0143]
根据一个实施例,电子系统300包括用于为电子系统300供电的电源设备(例如,电池320)。
[0144]
根据一个实施例,控制器305(或一个或多个专用计算单元,未示出)可以被配置为基于由tof设备100提供的距离信息确定附加信息(例如,位移信息、水平信息、材料信息、结构信息、振动信息和医疗诊断信息)。
[0145]
根据一个实施例,电子系统300包括一个或多个通信通道(总线)325以允许在tof设备100、控制器305(当提供时)、输入/输出设备310(当提供时)、无线接口315(当提供时)和电源设备320(当提供时)之间进行数据交换。
[0146]
图4示出了根据本发明的实施例的信号切割方法400的活动图。信号切割方法400允许在tof设备100的使用期间通过将操作参数应用于包络信号ees
env
来确定包络信号部分ees
envp
。
[0147]
根据一个实施例,信号切割方法400通过存储在tof设备100中或由tof设备100可访问的适当软件指令和/或通过tof设备100的适当硬件/固件来实现。特别地,信号切割方法400通过部分模块125来实现。
[0148]
详细地,信号切割方法400包括根据本身已知的技术确定包络信号ees
env
的最大值(动作节点405),即,包括计算包络信号ees
env
的最大值max_inv和所述最大值max_inv在包络信号ees
env
中的第一时间位置x_max_inv(在横坐标轴上,即,在时间上;也称为第一时刻x_max_inv)。
[0149]
信号切割方法400包括通过第一操作参数perc_l和第二操作参数perc_u分别计算包络信号ees
env
的第一阈值thresh1和第二阈值thresh2,第一阈值thresh1和第二阈值thresh2小于最大值max_inv(动作节点410)。详细地,第一阈值thresh1是与包络信号ees
env
的左侧部分的最大长度相关的包络信号ees
env
的阈值,第二阈值thresh2是与包络信号ees
env
的右侧部分的最大长度相关的包络信号ees
env
的阈值。换言之,包络信号ees
env
的左侧
部分包括范围在第一阈值thresh1到最大值max_inv之间的包络信号ees
env
的值,包络信号ees
env
的右侧部分包括范围在最大值max_inv到第二阈值thresh2之间的包络信号ees
env
的值。更详细地,基于包络信号ees
env
的最大值max_inv与第一操作参数perc_l和第二操作参数perc_u来分别计算(特别地,取决于其乘积)第一阈值thresh1和第二阈值thresh2。特别地,thresh1=perc_l
·
max_inv以及thresh2=perc_u
·
max_inv。
[0150]
信号切割方法400还包括确定第一阈值thresh1在包络信号ees
env
中的第二时间位置x_thresh1(在横坐标轴上,即,在时间上;也称为第二时刻x_max_inv)和第二阈值thresh2在包络信号ees
env
中的第三时间位置x_thresh2(在横坐标轴上,即,在时间上;也称为第三时刻x_max_inv)(动作节点415),第二时间位置x_thresh1和第三时间位置x_thresh2分别与包络信号ees
env
的左侧部分的最大长度和右侧部分的最大长度相关。第一时间位置x_thresh1和第二时间位置x_thresh2分别是包络信号ees
env
呈现第一阈值thresh1和第二阈值thresh2的包络信号ees
env
的时间位置,并且分别位于第一时间位置x_max_inv之前和之后(即,在时间尺度上分别在第一时间位置x_max_inv的左侧和右侧)。换言之,x_thresh1=x_max_inv-δ1并且x_thresh2=x_max_inv-δ2,其中,δ1和δ2是相应的时间间隔,该时间间隔的长度分别对应于包络信号ees
env
的左侧部分的最大时间长度和右侧部分的最大时间长度。因此,包络信号ees
env
的左侧部分至多介于第二时间位置x_thresh1与第一时间位置x_max_inv之间,并且包络信号ees
env
的右侧部分至多介于第一时间位置x_max_inv与第三时间位置x_thresh2之间。
[0151]
因此,根据一个实施例,包络信号部分ees
envp
包括(详细而言,与其相一致)包括在第二时间位置x_thresh1与第三时间位置x_thresh2之间的包络信号ees
env
的部分。
[0152]
可选地,根据不同的实施例,信号切割方法400还包括通过经由第三操作参数coeff1和第四操作参数coeff2计算包络信号ees
env
的第四时间位置x_opt1(在横坐标轴上,即,在时间上;也称为第四时刻x_max_inv)和第五时间位置x_opt2(在横坐标轴上,即,在时间上;也称为第五时刻x_max_inv)来优化包络信号部分ees
envp
(动作节点420)。第四时间位置x_opt1大于第二时间位置x_thresh1并且取决于第二时间位置x_thresh1和第三操作参数coeff1,并且第五时间位置x_opt2小于第三时间位置x_thresh2并且取决于第三时间位置x_thresh2和第四操作参数coeff2。在本实施例中,包络信号部分ees
envp
包括(详细而言,与其相一致)包络信号包括在第四时间位置x_opt1与第五时间位置x_opt2之间的包络信号ees
env
的部分。换言之,第四时间位置x_opt1和第五时间位置x_opt2分别指示包络信号ees
env
的左侧部分的优化长度和右侧部分的优化长度。特别地,x_thresh1《x_opt1《x_max_inv并且x_max_inv《x_opt2《x_thresh2。更详细地,第三操作参数coeff1和第四操作参数coeff2指示要分别应用于第二时间位置x_thresh1和第三时间位置x_thresh2以获得第四时间位置x_opt1和第五时间位置x_opt2的相应的时间偏移。换言之,x_opt1=x_thresh1 coeff1并且x_opt2=x_thresh2-coeff2,其中,coeff1《δ1并且coeff2《δ2。因此,在当前情况下,包络信号ees
env
的优化的左侧部分介于第四时间位置x_opt1与第一时间位置x_max_inv之间,并且包络信号ees
env
的优化的右侧部分介于第一时间位置x_max_inv与第五时间位置x_opt2之间。
[0153]
图5示出了根据本发明的实施例的飞行时间估计方法500的活动图。飞行时间估计方法500允许估计由tof设备100发射的超声信号与由被超声信号击中的目标对象t返回并
且在tof设备100处被接收的超声回波信号之间的飞行时间。
[0154]
根据一个实施例,飞行时间估计方法500通过存储在tof设备100中或由tof设备100可访问的适当软件指令和/或通过tof设备100的适当硬件/固件来实现。
[0155]
根据一个实施例,飞行时间估计方法500包括获取超声回波信号ues,从而获得对应的电回波信号ees(动作节点505)。根据一个实施例,在超声换能器105的调节和转换系统(未示出)处执行获取超声回波信号ues以获得对应的电回波信号ees。
[0156]
根据一个实施例,飞行时间估计方法500包括确定电回波信号ees的噪声功率np(动作节点510)。根据一个实施例,在处理单元110的傅立叶模块115处确定电回波信号ees的噪声功率np。
[0157]
根据一个实施例,飞行时间估计方法500包括确定包络信号ees
env
(动作节点515)。根据一个实施例,在处理单元110的希尔伯特模块120处确定包络信号ees
env
。
[0158]
根据一个实施例,飞行时间估计方法500包括根据先前描述的信号切割方法400确定包络信号部分ees
envp
(动作节点400)。根据一个实施例,在处理单元110的部分模块125处基于离线tof方法200a或在线tof方法200b产生的操作参数opk确定包络信号部分ees
envp
。
[0159]
根据一个实施例,飞行时间估计方法500包括根据包络信号部分ees
envp
和噪声功率np来确定包络信号估计ees
envest
(动作节点525)。根据一个实施例,在处理单元110的ukf模块130处基于离线tof方法200a或在线tof方法200b产生的ukf参数ukfpk来确定包络信号部分ees
envp
。
[0160]
根据一个实施例,飞行时间估计方法500包括根据包络信号估计ees
envest
确定tof估计并且根据tof估计确定距离估计d
est
(动作节点530)。根据一个实施例,在处理单元110的评估模块135处确定tof估计和距离估计d
est
。
[0161]
从对根据本发明做出的本发明的特点的检查来看,其允许的优点是很清楚的。
[0162]
信号切割方法400特别是通过降低ukf模块130的计算成本,降低了通过飞行时间估计方法500估计飞行时间所需要的计算成本。
[0163]
由动作节点415输出的包络信号部分ees
envp
已经针对ukf模块130被优化。尽管如此,根据动作节点420计算包络信号部分ees
envp
允许进一步降低计算成本并且提高飞行时间估计精度。
[0164]
通过离线tof方法200a来计算操作参数opk的优化子集和ukf参数ukfpk的优化子集。此外,还可以通过在线tof方法200b进一步优化第三操作参数coeff1和第四操作参数coeff2。
[0165]
最后,很明显,在不脱离如所附权利要求中限定的本发明的范围的情况下,可以对本文中描述和说明的本发明进行修改和变化。例如,所描述的不同实施例可以组合以提供进一步的解决方案。
[0166]
一种方法(200a;200b),用于提供由设备(100)发射的超声信号与由被所述超声信号击中的目标对象(t)返回并且在所述设备处被接收的超声回波信号之间的飞行时间的估计,所述方法可以概况为包括:获取(205)所述超声回波信号从而获得电回波信号;确定(210)所述电回波信号的噪声功率;确定(215)指示所述电回波信号的包络的包络信号;基于至少一个操作参数(opk)确定(220)所述包络信号的一部分,所述至少一个操作参数根据粒子群优化确定;根据无迹卡尔曼滤波器处理(225)所述包络信号的所述部分以及所述电
回波信号的噪声功率以获得所述包络信号的估计,其中,所述包络信号的估计是从所述包络信号的所述部分重新生成的所述包络信号的重新生成版本,所述处理基于根据所述粒子群优化确定的无迹卡尔曼滤波器参数(ukfpk);以及根据所述包络信号的估计提供(230)所述飞行时间的估计。方法(200a;200b)还包括确定(235a;235b)估计误差,其中,所述粒子群优化基于所述估计误差。
[0167]
所述确定(235a;235b)估计误差包括确定(235b)所述包络信号的估计与所述包络信号之间的差。
[0168]
方法(200a;200b)还包括基于所述飞行时间的估计确定(230)指示所述目标对象(t)与所述设备(100)之间的距离的距离估计,其中所述确定(235a;235b)估计误差包括确定(235a)所述距离估计与所述距离之间的差。
[0169]
所述确定(215)包络信号可以包括对所述电回波信号执行希尔伯特变换。
[0170]
所述包络信号的所述部分以所述包络信号的最大值为中心。
[0171]
所述处理(225)所述包络信号的操作部分可以包括提供重新生成的包络信号。
[0172]
所述至少一个操作参数(opk)包括以下中的至少一项:指示所述包络信号的所述部分在时间上的最大长度的操作信号,以及指示所述包络信号的所述部分在时间上的优化长度,所述优化长度小于所述最大长度。
[0173]
所述至少一个无迹卡尔曼滤波器参数(ukfpk)可以包括以下中的至少一项:评估参数,提供所述飞行时间的粗略估计;控制参数,用于控制sigma点围绕平均状态值的扩展;以及校正参数,提供对所述电回波信号的噪声功率的校正。
[0174]
一种设备(100),用于提供由所述设备发射的超声信号与由被所述超声信号击中的目标对象(t)返回并且在所述设备处被接收的超声回波信号之间的飞行时间的估计,所述设备可以概况为包括:调节和转换系统(105),用于获取所述超声回波信号,从而获得电回波信号;模块(115),用于确定所述电回波信号的噪声功率;模块(120),用于确定指示所述电回波信号的包络的包络信号;模块(125),用于基于至少一个操作参数(opk)确定所述包络信号的一部分,所述至少一个操作参数根据粒子群优化确定;模块(130),用于根据无迹卡尔曼滤波器处理所述包络信号的所述部分和所述电回波信号的噪声功率以获得所述包络信号的估计,其中所述包络信号的估计是从所述包络信号的所述部分重新生成的所述包络信号的重新生成版本,所述处理基于根据所述粒子群优化确定的至少一个无迹卡尔曼滤波器参数(ukfpk),以及模块(135),用于根据所述包络信号的估计提供所述飞行时间的所述估计。
[0175]
可以组合上述各种实施例以提供进一步的实施例。如果需要,可以修改实施例的方面,以采用各种实施例的概念来提供更进一步的实施例。
[0176]
根据以上详细描述,可以对实施例进行这些和其他改变。一般而言,在以下权利要求中,所使用的术语不应被解释为将权利要求限于说明书和权利要求中公开的特定实施例,而应被解释为包括所有可能的实施例以及该权利要求所享有的全部等效范围。因此,权利要求不受本公开的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。