1.本发明涉及一种适用于多规格垃圾袋的智能垃圾桶,具体涉及一种自动开盖闭合、自动套袋、自动封口和重量预警的适用于多规格垃圾袋的智能垃圾桶,属于智能家居领域。
背景技术:
2.垃圾桶在日常生活中随处可见,但是其仍存在很多非自动化和不智能的因素。比如不能够适应所有规格的垃圾袋,需要人工更换垃圾袋,需要在垃圾装满时人工封口并取出垃圾袋,在取出垃圾袋后发现垃圾过重导致垃圾袋破裂等很多不方便之处。这不仅存在着卫生隐患,还大大降低了人们的生活质量,不能满足人们对于家居智能化的要求。
3.现有的智能垃圾桶存在着功能单一、智能化不足等缺点。因此,有必要对现有的智能垃圾桶进行进一步的改进。
技术实现要素:
4.针对上述不足,本发明提供了一种适用于多规格垃圾袋的智能垃圾桶。
5.本发明是通过以下技术方案实现的:一种适用于多规格垃圾袋的智能垃圾桶,是由桶盖、桶身和桶座组成的。所述的桶盖通过卡槽安装在桶身上,所述的桶身通过卡槽安装在桶座上。
6.所述的桶盖是由桶盖红外传感器、垃圾袋供应系统、桶盖翻盖和垃圾袋撑开系统组成的。所述的桶盖红外传感器嵌于桶盖的外壁,所述的垃圾袋供应系统位于桶盖的最底层,所述的垃圾袋撑开系统位于垃圾袋供应系统的上方,所述的桶盖翻盖通过转轴与垃圾袋撑开系统相连接,位于桶盖的最上方。
7.所述的垃圾袋供应系统是由垃圾袋放置筒、第一橡胶轮组、第二橡胶轮组、转向铁棒、第三橡胶轮组和热封条组成的。所述的垃圾袋放置筒嵌于桶盖底板上,所述的第一橡胶轮组和第二橡胶轮组关于垃圾袋放置筒的出口对称设置,所述的转向铁棒嵌于桶盖底板上,所述的第三橡胶轮组关于转向铁棒对称设置并垂直于第一橡胶轮组和第二橡胶轮组。
8.所述的桶盖翻盖上设有桶盖风扇,位于桶盖翻盖的中心。
9.所述的垃圾袋撑开系统是由网状轨道、第一移动橡胶棒、第二移动橡胶棒、第三移动橡胶棒、第四移动橡胶棒所组成的。所述的网状轨道嵌于垃圾袋撑开系统的底部,所述的第一移动橡胶棒、第二移动橡胶棒、第三移动橡胶棒、第四移动橡胶棒置于网状轨道侧边的矩形突出处,通过电机控制在网状轨道中移动。
10.所述的桶身是由桶身开门、前筒壁、侧筒壁和后筒壁组成的。所述的桶身开门通过铰链和齿轮连接在前筒壁的外侧,所述的侧筒壁位于前筒壁两侧,并与前筒壁垂直,所述的后筒壁位于两侧筒壁之间,并与两侧筒壁垂直,与前筒壁平行。
11.所述的桶身开门是由传送带、第一开门电机和第二开门电机组成的。所述的传送带嵌于桶身开门的内侧,所述的第一开门电机和第二开门电机呈对称分布,位于桶身开门
的底端。
12.所述的前筒壁是由前壁机械爪组、前壁热封条、前壁机械爪电机组、前壁热封条电机组组成的。所述的前壁机械爪组连接在前壁机械爪电机组上,所述的前壁机械爪电机组嵌于前筒壁内侧的最上方,所述的前壁热封条连接在前壁热封条电机上,所述的前壁热封条电机嵌于前筒壁内侧,位于前壁机械爪电机组的下方。
13.所述的前壁机械爪组是由一个个大小不一的机械爪组成的。
14.所述的机械爪是由机械爪闭合电机、第一齿形爪手、第二齿形爪手和橡胶套组成的。所述的第一齿形爪手和第二齿形爪手嵌于机械爪闭合电机上,所述的机械爪闭合电机与前壁机械爪电机组相连接,所述的橡胶套位于机械爪外部,包裹了第一齿形爪手和第二齿形爪手。
15.所述的侧筒壁有两种组成结构。
16.所述的侧筒壁的第一种组成结构是由静电板、勾爪轨道、侧壁机械爪组、侧壁勾爪模块、侧壁红外传感器、侧壁机械爪电机组、侧壁勾爪推进电机组成。所述的静电板嵌于侧筒壁内侧,所述的勾爪轨道嵌于静电板上,所述的侧壁机械爪组连接在侧壁机械爪电机组上,所述的侧壁机械爪电机组嵌于侧筒壁内侧的最上方,所述的侧壁勾爪模块连接在侧壁勾爪推进电机上,所述的侧壁红外传感器嵌于勾爪轨道上。
17.所述的侧筒壁的第二种组成结构是由静电板、勾爪轨道、侧壁机械爪组、侧壁勾爪模块、侧壁红外传感器、侧壁机械爪电机组、侧壁勾爪推进电机、补偿块轨道和补偿块组成的。所述的静电板嵌于侧筒壁内侧,所述的勾爪轨道嵌于静电板上,所述的侧壁机械爪组连接在侧壁机械爪电机组上,所述的侧壁机械爪电机组嵌于侧筒壁内侧的最上方,所述的侧壁勾爪模块连接在侧壁勾爪推进电机上,所述的侧壁红外传感器嵌于勾爪轨道上,所述的补偿块轨道嵌于勾爪轨道的下方,所述的补偿块利用其末端凸起卡在补偿块轨道中。
18.所述的勾爪模块是由勾爪和勾爪电机组成的。所述的勾爪嵌于勾爪电机上,所述的勾爪电机与侧壁勾爪推进电机相连。
19.所述的后筒壁是由后壁推板、后壁热封条、后壁机械爪组、后壁机械爪电机、后壁热封条电机组、后壁推板电机组组成的。所述的后壁机械爪组连接在后壁机械爪电机组上,所述的后壁机械爪电机组嵌于后筒壁内侧的最上方,所述的后壁热封条连接在后壁热封条电机上,所述的后壁热封条电机嵌于前筒壁内侧,位于后壁机械爪电机组的下方,所述的后壁推板连接在后壁推板电机组上,所述的后壁推板电机组嵌于后壁内侧,位于后壁热封条电机的下方。
20.所述的桶座是由桶底和垃圾袋自适应系统组成的。所述的垃圾袋自适应系统位于桶底的上方。
21.所述的桶底上设有桶底风扇,位于桶底的中心所述的垃圾袋自适应系统是由桶底通风口、重量传感器、第一桶底伸缩杆,第一桶底伸缩电机、第二桶底伸缩杆和第二桶底伸缩电机组成的。所述的桶底通风口是在垃圾袋自适应系统上面镂空的空洞,所述的重量传感器嵌于垃圾袋自适应系统的底板上,所述的第一伸缩杆和第二伸缩杆分别连接在第一伸缩电机和第二伸缩电机上,并且呈对称分布,所述的第一伸缩电机和第二伸缩电机嵌于桶底的上方。
22.该发明可以实现自动开盖闭合、自动套袋、自动封口和重量预警,并且适用于多种
规格的垃圾袋,较宜大规模使用。
附图说明
23.附图1为本发明的外观正视图;附图2为本发明的外观后视图;附图3为本发明的外观侧视图;附图4为本发明的外观顶视图;附图5为桶盖翻盖示意图;附图6为垃圾袋供应系统示意图;附图7为垃圾袋供应系统立体示意图;附图8为垃圾袋撑开系统初始状态示意图;附图9为垃圾袋撑开系统初始状态立体示意图;附图10为垃圾袋撑开系统中间状态示意图;附图11为垃圾袋撑开系统中间状态立体示意图;附图12为垃圾袋撑开系统最终状态示意图;附图13为垃圾袋撑开系统最终状态立体示意图;附图14为垃圾袋供应系统纵剖面示意图;附图15为前筒壁内侧示意图;附图16为前筒壁侧面示意图;附图17为机械爪示意图;附图18为后筒壁内侧示意图;附图19为后筒壁侧面示意图;附图20为实现例一中侧筒壁内侧示意图;附图21为实现例一中侧筒壁侧面示意图;附图22为侧壁勾爪模块示意图;附图23为实现例二中桶身开门内侧示意图;附图24为实现例二中桶身开门侧面示意图;附图25为桶座示意图;附图26为实现例一中桶座内侧示意图;附图27为实现例二中桶座内侧示意图附图28为补偿块示意图附图29为桶座侧剖面示意图图中,100、桶盖,110、桶盖红外传感器,120、垃圾袋供应系统,121、垃圾袋放置筒,122、第一橡胶轮组,123、第二橡胶轮组,124、转向铁棒,125、第三橡胶轮组,126、热封条,130、桶盖翻盖,131、桶盖风扇,140、垃圾袋撑开系统,141、网状轨道,142、第一移动橡胶棒,143、第二移动橡胶棒,144、第三移动橡胶棒,145、第四移动橡胶棒,200、桶身,210、桶身开门,211、传送带,212、第一开门电机,213、第二开门电机,220、前筒壁,221、前壁机械爪组,222、前壁热封条,223、前壁机械爪电机组,224、前壁热封条电机,230、机械爪,231、机械爪闭合电机,232、第一齿形爪手,233、第二齿形爪手,234、橡胶套,240、侧筒壁,241、静电板,
242、勾爪轨道,243、侧壁机械爪组,244、侧壁勾爪模块,245、侧壁红外传感器,246、侧壁机械爪电机组,247、侧壁勾爪推进电机,248、勾爪,249、勾爪转动电机,2410、补偿块轨道,2411、补偿块,250、后筒壁,251、后壁推板,252、后壁热封条,253、后壁机械爪组,254、后壁机械爪电机组,255、后壁热封条电机,256、后壁推板电机组,300、桶座,310、桶底,311、桶底风扇,320、垃圾袋自适应系统,321、桶底通风口,322、重量传感器,323、第一桶底伸缩杆,324、第一桶底伸缩电机,325、第二桶底伸缩杆,326、第二桶底伸缩电机。
具体实施方式
24.为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”或“嵌于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
25.应理解,以下实施例仅用于说明本发明而非用于限定本发明的范围。
26.需要说明的是,本发明有两种实施例,下面结合附图对其分别说明。
27.实施例一实施例一适用的附图有:附图1-附图22、附图25、附图26、附图29。
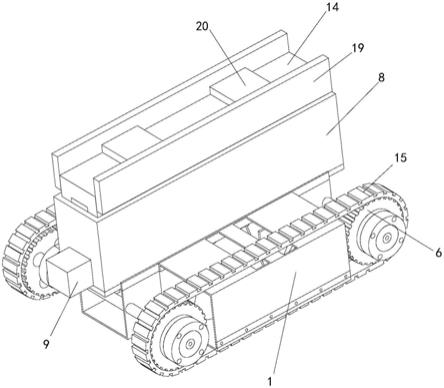
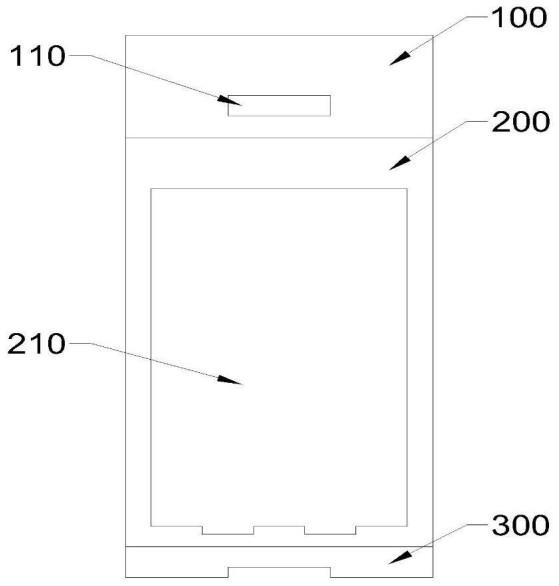
28.在实施例一中,一种适用于多规格垃圾袋的智能垃圾桶,是由桶盖100、桶身200和桶座300组成的。所述的桶盖100通过卡槽安装在桶身上,所述的桶身200通过卡槽安装在桶座300上。
29.所述的桶盖100是由桶盖红外传感器110、垃圾袋供应系统120、桶盖翻盖130和垃圾袋撑开系统140组成的。所述的桶盖红外传感器110嵌于桶盖100的外壁,所述的垃圾袋供应系统120位于桶盖100的最底层,所述的垃圾袋撑开系统140位于垃圾袋供应系统120的上方,所述的桶盖翻盖130通过转轴与垃圾袋撑开系统140相连接,位于桶盖的最上方。
30.所述的垃圾袋供应系统120是由垃圾袋放置筒121、第一橡胶轮组122、第二橡胶轮组123、转向铁棒124、第三橡胶轮组125和热封条126组成的。所述的垃圾袋放置筒121嵌于桶盖100的底板上,所述的第一橡胶轮组122和第二橡胶轮组123关于垃圾袋放置筒121的出口对称设置,所述的转向铁棒124嵌于桶盖100的底板上,所述的第三橡胶轮组125关于转向铁棒124对称设置并垂直于第一橡胶轮组122和第二橡胶轮组123。
31.所述的桶盖翻盖130上设有桶盖风扇131,位于桶盖翻盖130的中心。
32.所述的垃圾袋撑开系统140是由网状轨道141、第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒144和第四移动橡胶棒145所组成的。所述的网状轨道141嵌于垃圾袋撑开系统140的底部,所述的第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒144、第四移动橡胶棒145置于网状轨道141侧边的矩形突出处,通过电机控制在网状轨道141中移动。
33.所述的第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒144和第四移动橡胶棒145可以在电机的控制下在纵向上伸长和缩短。
34.所述的桶身200是由桶身开门210、前筒壁220、侧筒壁240和后筒壁250组成的。所述的桶身开门210通过铰链和齿轮连接在前筒壁220的外侧,所述的侧筒壁240位于前筒壁
220两侧,并与前筒壁220垂直,所述的后筒壁250位于两侧筒壁240之间,并与两侧筒壁240垂直,与前筒壁220平行吗,前筒壁220、两个侧筒壁240和后筒壁250四者组成一个横截面为矩形的桶状整体。
35.所述的桶身开门210是由传送带211、第一开门电机212和第二开门电机213组成的。所述的传送带211嵌于桶身开门210的内侧,所述的第一开门电机212和第二开门电机213呈对称分布,位于桶身开门210的底端。
36.所述的前筒壁220是由前壁机械爪组221、前壁热封条222、前壁机械爪电机组223、前壁热封条电机224组成的。所述的前壁机械爪组221连接在前壁机械爪电机组223上,所述的前壁机械爪电机组223嵌于前筒壁220内侧的最上方,所述的前壁热封条222连接在前壁热封条电机224上,所述的前壁热封条电机224嵌于前筒壁220内侧,位于前壁机械爪电机组223的下方。
37.所述的侧筒壁240是由静电板241、勾爪轨道242、侧壁机械爪组243、侧壁勾爪模块244、侧壁红外传感器245、侧壁机械爪电机组246、侧壁勾爪推进电机247组成。所述的静电板241嵌于侧筒壁240内侧,所述的勾爪轨道242嵌于静电板241上,所述的侧壁机械爪组243连接在侧壁机械爪电机组246上,所述的侧壁机械爪电机组246嵌于侧筒壁240内侧的最上方,所述的侧壁勾爪模块244连接在侧壁勾爪推进电机247上,所述的侧壁红外传感器245嵌于勾爪轨道242上。
38.所述的侧壁勾爪模块244是由勾爪248和勾爪转动电机249组成的。所述的勾爪248嵌于勾爪转动电机249上,所述的勾爪转动电机249与侧壁勾爪推进电机247相连。
39.所述的后筒壁250是由后壁推板251、后壁热封条252、后壁机械爪组253、后壁机械爪电机组254、后壁热封条电机255、后壁推板电机组256组成的。所述的后壁机械爪组253连接在后壁机械爪电机组254上,所述的后壁机械爪电机组254嵌于后筒壁250内侧的最上方,所述的后壁热封条252连接在后壁热封条电机255上,所述的后壁热封条电机255嵌于前筒壁250内侧,位于后壁机械爪电机组254的下方,所述的后壁推板251连接在后壁推板电机组256上,所述的后壁推板电机组256嵌于后壁250内侧,位于后壁热封条电机255的下方。
40.所述的前壁机械爪组221、侧壁机械爪组243和后壁机械爪组253均是由一个个大小不一的机械爪230组成的。
41.所述的机械爪230是由机械爪闭合电机231、第一齿形爪手232、第二齿形爪手233和橡胶套234组成的。所述的第一齿形爪手232和第二齿形爪手233嵌于机械爪闭合电机231上,所述的机械爪闭合电机231与前壁机械爪电机组221或侧壁机械爪组243和后壁机械爪组253相连接,所述的橡胶套234位于机械爪230外部,包裹住了第一齿形爪手232和第二齿形爪手233。
42.所述的桶座300是由桶底310和垃圾袋自适应系统320组成的。所述的垃圾袋自适应系统320位于桶底310的上方。
43.所述的桶底310上设有桶底风扇311,位于桶底310的中心所述的垃圾袋自适应系统320是由桶底通风口321、重量传感器322、第一桶底伸缩杆323,第一桶底伸缩电机324、第二桶底伸缩杆325和第二桶底伸缩电机326组成的。所述的桶底通风口321是在垃圾袋自适应系统320上面镂空的空洞,所述的重量传感器322嵌于垃圾袋自适应系统320的底板上,所述的第一桶底伸缩杆323和第二桶底伸缩杆325分别连接
在第一桶底伸缩电机324和第二桶底伸缩电机326上,并且呈对称分布,所述的第一桶底伸缩电机324和第二桶底伸缩电机326嵌于桶底310的上方。
44.本实现例在使用时,将成卷的垃圾袋放入121垃圾袋放置筒中,通过121垃圾袋放置筒的垃圾袋出口后经过122第一橡胶轮组和123第二橡胶轮组两对反向旋转的橡胶轮之后通过124转向铁棒转向,之后经过125第三橡胶轮组这两个同为逆时针转动的橡胶轮后,本来折叠在一起的垃圾袋在125第三橡胶轮组右边将会被撵开一个豁口,此时142第一移动橡胶棒、143第二移动橡胶棒、144和145第四移动橡胶棒在纵向伸长,插入豁口,此时四根橡胶棒的位置如图8和图9所示;然后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在电机的驱动下首先在竖向上将垃圾袋撑开,此时四根橡胶棒的位置如图10和图11所示;然后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在电机的驱动下在横向上将垃圾袋撑开,此时四根橡胶棒的位置如图12和图13所示,在竖向和横向拉开的过程中,四根橡胶棒可以沿着141网状轨道调节位置,使得垃圾袋完全撑开;在垃圾袋完全撑开之后,控制126热封条加热,将垃圾袋连接处熔断,完整取下这一个垃圾袋;与此同时,垃圾袋大小的尺寸信息被四根橡胶棒的坐标所表示,之后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒继续在纵向上伸长;然后根据四根橡胶棒的坐标信息从221前壁机械爪组、243侧壁机械爪组和253后壁机械爪组中选择合适大小的机械爪块,并由223前壁机械爪电机组、246侧壁机械爪电机组和254后壁机械爪电机组分别控制221前壁机械爪组、243侧壁机械爪组和253后壁机械爪组伸长到垃圾袋的位置,并控制230机械爪的231机械爪闭合电机闭合,使得232第一齿形爪手和233第二齿形爪手紧紧夹住垃圾袋,又因为有234橡胶套的存在,增加了摩擦力,垃圾袋更加不会掉;与此同时,142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在纵向上缩短,回归其原始长度,并在电机的作用下沿141网状轨道回归到如图8和图9所示的初始位置;然后131桶盖风扇和311桶底风扇工作,131桶盖风扇向内吹风,311桶底风扇经由321桶底通风口向外吹风,从而使得垃圾袋得到充分的展开,与此同时,两个240侧筒壁的241静电板带电,利用静电吸引轻物的性质使得垃圾袋在横向和竖向上展开;与此同时,两个240侧筒壁上的245侧壁红外传感器工作,通过分析接收红外信号的强弱判断垃圾袋的厚薄,并记录数据;此时若使用者想要扔垃圾,位于100桶盖上的110桶盖红外传感器感应到有人靠近,于是控制130桶盖翻盖翻开,以便于垃圾投入;与此同时,324第一桶底伸缩电机和326第二桶底伸缩电机工作,推动323第一桶底伸缩杆和325第二桶底伸缩杆纵向伸展,从而使得320垃圾袋自适应系统纵向移动,当320垃圾袋自适应系统上的322重量传感器感受到有压力时,此压力应当来源于垃圾袋内的垃圾,于是通过324第一桶底伸缩电机和326第二桶底伸缩电机调整320垃圾袋自适应系统的高度,使320垃圾袋自适应系统受到的压力恰好为最大值,此时说明320垃圾袋自适应系统完全承受垃圾的重量,同时垃圾袋在纵向上的伸展达到最大,此时将320垃圾袋自适应系统的高度数据记录,并结合142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒得出的袋口大小数据和245侧壁红外传感器得到的垃圾袋厚度数据得到垃圾袋的最大承重重量;当322重量传感器的数值等于最大承重时,控制两个240侧筒壁的243侧壁机械爪组松开232第一齿形爪手和233第二齿形爪手,在246侧壁机械爪电机组的作用下回归原位;然后247侧壁勾爪推进电机控制244侧壁勾爪模块推进,当其推进至垃圾袋边缘时,
244侧壁勾爪模块的248勾爪在249勾爪转动电机的控制下由图22所示的248-1的位置转动到248-2的位置,这个过程中若使用的垃圾袋有抽绳,则会勾中抽绳,若使用的垃圾袋没有抽绳,则无用处;然后由223前壁机械爪电机组和254后壁机械爪电机组控制221前壁机械爪组和253后壁机械爪组向内移动,直至两者相碰,此时垃圾袋的袋口应为最扁;然后由224前壁热封条电机和255后壁热封条电机控制222前壁热封条和252后壁热封条的热封条加热,并向内移动,直至两者相碰,此时垃圾袋口因为热封条的温度而被热封;然后由223前壁机械爪电机组和254后壁机械爪电机组控制221前壁机械爪组和253后壁机械爪组的231机械爪闭合电机转动,从而使得232第一齿形爪手和233第二齿形爪手松开,并在223前壁机械爪电机组和254后壁机械爪电机组的控制下将221前壁机械爪组和253后壁机械爪组回归原位;然后由247侧壁勾爪推进电机控制244侧壁勾爪模块往回缩,在这个过程中,垃圾袋口被收紧,当247侧壁勾爪推进电机收回原位时,244侧壁勾爪模块再在电机的作用下沿着242勾爪轨道向纵向的下方运动,这个过程中垃圾袋口被进一步收紧,当244侧壁勾爪模块不能再运动时,说明垃圾袋口受到最紧,此时控制244侧壁勾爪模块的249勾爪转动电机转动,使得248勾爪从248-2的位置转回248-1的位置,从而松开勾爪;然后由324第一桶底伸缩电机和326第二桶底伸缩电机控制323第一桶底伸缩杆和325第二桶底伸缩杆在纵向上收缩,使得320垃圾袋自适应系统回归原位,此时垃圾已经被打包好;然后控制212第一开门电机和213第二开门电机转动,使得210桶身开门向下打开;当210桶身开门完全打开后,控制256后壁推板电机组伸长,使得251后壁推板将垃圾袋顶出320垃圾袋自适应系统至211传送带上;此时256后壁推板电机组缩短,将251后壁推板回归原处,与此同时211传送带启动,将垃圾袋送出垃圾桶;最后由212第一开门电机和213第二开门电机控制210桶身开门回归原位;上述步骤完成后,开始新一轮循环。
45.实施例二实施例二适用的附图有:附图1-附图19、附图22-附图25、附图27-附图29。
46.在实施例二中,一种适用于多规格垃圾袋的智能垃圾桶,是由桶盖100、桶身200和桶座300组成的。所述的桶盖100通过卡槽安装在桶身上,所述的桶身200通过卡槽安装在桶座300上。
47.所述的桶盖100是由桶盖红外传感器110、垃圾袋供应系统120、桶盖翻盖130和垃圾袋撑开系统140组成的。所述的桶盖红外传感器110嵌于桶盖100的外壁,所述的垃圾袋供应系统120位于桶盖100的最底层,所述的垃圾袋撑开系统140位于垃圾袋供应系统120的上方,所述的桶盖翻盖130通过转轴与垃圾袋撑开系统140相连接,位于桶盖的最上方。
48.所述的垃圾袋供应系统120是由垃圾袋放置筒121、第一橡胶轮组122、第二橡胶轮组123、转向铁棒124、第三橡胶轮组125和热封条126组成的。所述的垃圾袋放置筒121嵌于桶盖100的底板上,所述的第一橡胶轮组122和第二橡胶轮组123关于垃圾袋放置筒121的出口对称设置,所述的转向铁棒124嵌于桶盖100的底板上,所述的第三橡胶轮组125关于转向铁棒124对称设置并垂直于第一橡胶轮组122和第二橡胶轮组123。
49.所述的桶盖翻盖130上设有桶盖风扇131,位于桶盖翻盖130的中心。
50.所述的垃圾袋撑开系统140是由网状轨道141、第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒144和第四移动橡胶棒145所组成的。所述的网状轨道141嵌于垃圾袋撑开系统140的底部,所述的第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒
144、第四移动橡胶棒145置于网状轨道141侧边的矩形突出处,通过电机控制在网状轨道141中移动。
51.所述的第一移动橡胶棒142、第二移动橡胶棒143、第三移动橡胶棒144和第四移动橡胶棒145可以在电机的控制下在纵向上伸长和缩短。
52.所述的桶身200是由桶身开门210、前筒壁220、侧筒壁240和后筒壁250组成的。所述的桶身开门210通过铰链和齿轮连接在前筒壁220的外侧,所述的侧筒壁240位于前筒壁220两侧,并与前筒壁220垂直,所述的后筒壁250位于两侧筒壁240之间,并与两侧筒壁240垂直,与前筒壁220平行吗,前筒壁220、两个侧筒壁240和后筒壁250四者组成一个横截面为矩形的桶状整体。
53.所述的桶身开门210是由传送带211、第一开门电机212和第二开门电机213组成的。所述的传送带211嵌于桶身开门210的内侧,所述的第一开门电机212和第二开门电机213呈对称分布,位于桶身开门210的底端。
54.所述的前筒壁220是由前壁机械爪组221、前壁热封条222、前壁机械爪电机组223、前壁热封条电机224组成的。所述的前壁机械爪组221连接在前壁机械爪电机组223上,所述的前壁机械爪电机组223嵌于前筒壁220内侧的最上方,所述的前壁热封条222连接在前壁热封条电机224上,所述的前壁热封条电机224嵌于前筒壁220内侧,位于前壁机械爪电机组223的下方。
55.所述的侧筒壁240是由静电板241、勾爪轨道242、侧壁机械爪组243、侧壁勾爪模块244、侧壁红外传感器245、侧壁机械爪电机组246、侧壁勾爪推进电机247组成。所述的静电板241嵌于侧筒壁240内侧,所述的勾爪轨道242嵌于静电板241上,所述的侧壁机械爪组243连接在侧壁机械爪电机组246上,所述的侧壁机械爪电机组246嵌于侧筒壁240内侧的最上方,所述的侧壁勾爪模块244连接在侧壁勾爪推进电机247上,所述的侧壁红外传感器245嵌于勾爪轨道242上。
56.所述的侧壁勾爪模块244是由勾爪248和勾爪转动电机249组成的。所述的勾爪248嵌于勾爪转动电机249上,所述的勾爪转动电机249与侧壁勾爪推进电机247相连。
57.所述的侧筒壁240是由静电板241、勾爪轨道242、侧壁机械爪组243、侧壁勾爪模块244、侧壁红外传感器245、侧壁机械爪电机组246、侧壁勾爪推进电机247、补偿块轨道2410和补偿块2411组成的。所述的静电板241嵌于侧筒壁240的内侧,所述的勾爪轨道242嵌于静电板241上,所述的侧壁机械爪组243连接在侧壁机械爪电机组246上,所述的侧壁机械爪电机组246嵌于侧筒壁240的内侧的最上方,所述的侧壁勾爪模块244连接在侧壁勾爪推进电机247上,所述的侧壁红外传感器245嵌于勾爪轨道242上,所述的补偿块轨道2410嵌于勾爪轨道242的下方,所述的补偿块2411利用其末端凸起卡在补偿块轨道2410中,可以上下滑动。
58.所述的前壁机械爪组221、侧壁机械爪组243和后壁机械爪组253均是由一个个大小不一的机械爪230组成的。
59.所述的机械爪230是由机械爪闭合电机231、第一齿形爪手232、第二齿形爪手233和橡胶套234组成的。所述的第一齿形爪手232和第二齿形爪手233嵌于机械爪闭合电机231上,所述的机械爪闭合电机231与前壁机械爪电机组221或侧壁机械爪组243和后壁机械爪组253相连接,所述的橡胶套234位于机械爪230外部,包裹住了第一齿形爪手232和第二齿
形爪手233。
60.所述的桶座300是由桶底310和垃圾袋自适应系统320组成的。所述的垃圾袋自适应系统320位于桶底310的上方。
61.所述的桶底310上设有桶底风扇311,位于桶底310的中心所述的垃圾袋自适应系统320是由桶底通风口321、重量传感器322、第一桶底伸缩杆323,第一桶底伸缩电机324、第二桶底伸缩杆325和第二桶底伸缩电机326组成的。所述的桶底通风口321是在垃圾袋自适应系统320上面镂空的空洞,所述的重量传感器322嵌于垃圾袋自适应系统320的底板上,所述的第一桶底伸缩杆323和第二桶底伸缩杆325分别连接在第一桶底伸缩电机324和第二桶底伸缩电机326上,并且呈对称分布,所述的第一桶底伸缩电机324和第二桶底伸缩电机326嵌于桶底310的上方。
62.本实现例在使用时,将成卷的垃圾袋放入121垃圾袋放置筒中,通过121垃圾袋放置筒的垃圾袋出口后经过122第一橡胶轮组和123第二橡胶轮组两对反向旋转的橡胶轮之后通过124转向铁棒转向,之后经过125第三橡胶轮组这两个同为逆时针转动的橡胶轮后,本来折叠在一起的垃圾袋在125第三橡胶轮组右边将会被撵开一个豁口,此时142第一移动橡胶棒、143第二移动橡胶棒、144和145第四移动橡胶棒在纵向伸长,插入豁口,此时四根橡胶棒的位置如图8和图9所示;然后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在电机的驱动下首先在竖向上将垃圾袋撑开,此时四根橡胶棒的位置如图10和图11所示;然后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在电机的驱动下在横向上将垃圾袋撑开,此时四根橡胶棒的位置如图12和图13所示,在竖向和横向拉开的过程中,四根橡胶棒可以沿着141网状轨道调节位置,使得垃圾袋完全撑开;在垃圾袋完全撑开之后,控制126热封条加热,将垃圾袋连接处熔断,完整取下这一个垃圾袋;与此同时,垃圾袋大小的尺寸信息被四根橡胶棒的坐标所表示,之后142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒继续在纵向上伸长;然后根据四根橡胶棒的坐标信息从221前壁机械爪组、243侧壁机械爪组和253后壁机械爪组中选择合适大小的机械爪块,并由223前壁机械爪电机组、246侧壁机械爪电机组和254后壁机械爪电机组分别控制221前壁机械爪组、243侧壁机械爪组和253后壁机械爪组伸长到垃圾袋的位置,并控制230机械爪的231机械爪闭合电机闭合,使得232第一齿形爪手和233第二齿形爪手紧紧夹住垃圾袋,又因为有234橡胶套的存在,增加了摩擦力,垃圾袋更加不会掉;与此同时,142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒在纵向上缩短,回归其原始长度,并在电机的作用下沿141网状轨道回归到如图8和图9所示的初始位置;然后131桶盖风扇和311桶底风扇工作,131桶盖风扇向内吹风,311桶底风扇经由321桶底通风口向外吹风,从而使得垃圾袋得到充分的展开,与此同时,两个240侧筒壁的241静电板带电,利用静电吸引轻物的性质使得垃圾袋在横向和竖向上展开;与此同时,两个240侧筒壁上的245侧壁红外传感器工作,通过分析接收红外信号的强弱判断垃圾袋的厚薄,并记录数据;此时若使用者想要扔垃圾,位于100桶盖上的110桶盖红外传感器感应到有人靠近,于是控制130桶盖翻盖翻开,以便于垃圾投入;与此同时,324第一桶底伸缩电机和326第二桶底伸缩电机工作,推动323第一桶底伸缩杆和325第二桶底伸缩杆纵向伸展,从而使得320垃圾袋自适应系统纵向移动,在向上移动时碰到2411补偿块,此时320垃圾袋自适应系统的空洞被补上,于是连带着2411补偿块一起
向上沿着2410补偿块轨道运动,当320垃圾袋自适应系统上的322重量传感器感受到有压力时,此压力应当来源于垃圾袋内的垃圾,于是通过324第一桶底伸缩电机和326第二桶底伸缩电机调整320垃圾袋自适应系统的高度,使320垃圾袋自适应系统受到的压力恰好为最大值,此时说明320垃圾袋自适应系统完全承受垃圾的重量,同时垃圾袋在纵向上的伸展达到最大,此时将320垃圾袋自适应系统的高度数据记录,并结合142第一移动橡胶棒、143第二移动橡胶棒、144第三移动橡胶棒和145第四移动橡胶棒得出的袋口大小数据和245侧壁红外传感器得到的垃圾袋厚度数据得到垃圾袋的最大承重重量;当322重量传感器的数值等于最大承重时,控制两个240侧筒壁的243侧壁机械爪组松开232第一齿形爪手和233第二齿形爪手,在246侧壁机械爪电机组的作用下回归原位;然后247侧壁勾爪推进电机控制244侧壁勾爪模块推进,当其推进至垃圾袋边缘时,244侧壁勾爪模块的248勾爪在249勾爪转动电机的控制下由图22所示的248-1的位置转动到248-2的位置,这个过程中若使用的垃圾袋有抽绳,则会勾中抽绳,若使用的垃圾袋没有抽绳,则无用处;然后由223前壁机械爪电机组和254后壁机械爪电机组控制221前壁机械爪组和253后壁机械爪组向内移动,直至两者相碰,此时垃圾袋的袋口应为最扁;然后由224前壁热封条电机和255后壁热封条电机控制222前壁热封条和252后壁热封条的热封条加热,并向内移动,直至两者相碰,此时垃圾袋口因为热封条的温度而被热封;然后由223前壁机械爪电机组和254后壁机械爪电机组控制221前壁机械爪组和253后壁机械爪组的231机械爪闭合电机转动,从而使得232第一齿形爪手和233第二齿形爪手松开,并在223前壁机械爪电机组和254后壁机械爪电机组的控制下将221前壁机械爪组和253后壁机械爪组回归原位;然后由247侧壁勾爪推进电机控制244侧壁勾爪模块往回缩,在这个过程中,垃圾袋口被收紧,当247侧壁勾爪推进电机收回原位时,244侧壁勾爪模块再在电机的作用下沿着242勾爪轨道向纵向的下方运动,这个过程中垃圾袋口被进一步收紧,当244侧壁勾爪模块不能再运动时,说明垃圾袋口受到最紧,此时控制244侧壁勾爪模块的249勾爪转动电机转动,使得248勾爪从248-2的位置转回248-1的位置,从而松开勾爪;然后由324第一桶底伸缩电机和326第二桶底伸缩电机控制323第一桶底伸缩杆和325第二桶底伸缩杆在纵向上收缩,在此过程中当320垃圾袋自适应系统运动到2410补偿块轨道最底端时,2411补偿块被卡住,不能再向下运动,只剩320垃圾袋自适应系统向下运动,直至320垃圾袋自适应系统回归原位,此时垃圾已经被打包好;然后控制212第一开门电机和213第二开门电机转动,使得210桶身开门向下打开;当210桶身开门完全打开后,控制256后壁推板电机组伸长,使得251后壁推板将垃圾袋顶出320垃圾袋自适应系统至211传送带上;此时256后壁推板电机组缩短,将251后壁推板回归原处,与此同时211传送带启动,将垃圾袋送出垃圾桶;最后由212第一开门电机和213第二开门电机控制210桶身开门回归原位;上述步骤完成后,开始新一轮循环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。