1.本发明涉及视觉传感器领域,特别是涉及一种面阵相机与光结构相机采集图像配准方法。
背景技术:
2.目前常规的视觉传感器主要包括面扫描和线扫描两种类型,其中面扫描型相机因为能一次整体成像,图像的像素代表距离、畸变等参数稳定,可以准确进行尺寸等测量,线扫描型相机一般为结构光相机,可以逐行成像,适合用在连续成像场景,横向的像素代表距离、畸变等参数稳定,但是纵向参数受触发脉冲的影响,需要进行横纵比调整后方可以实现测量功能。同时捕获的面扫描型相机和结构光相机因成像机理的差异导致原始图像数据无一一对应关系,而多元数据融合需两类图像在像素级一一对应,需简易可靠且高精度的配准方法。
技术实现要素:
3.针对上述问题,本发明提供了一种面阵相机与结构光相机采集图像配准方法,具有可以准确对应面阵图像与结构光图像像素,提高配准可靠性的优点。
4.本发明的技术方案是:
5.一种面阵相机与结构光相机采集图像配准方法,包括如下步骤:
6.s1、在同样位置同时使用面阵相机与结构光相机采集图像;
7.s2、定义面阵相机采集的图像横纵向分辨率为s1、图片尺寸为h1×
w1,定义结构光相机的图像为每张j行,每张的横向像素为w2,横向分辨率为s2;
8.s3、获取第i张面阵相机图像视野区域对应的结构光相机图像;
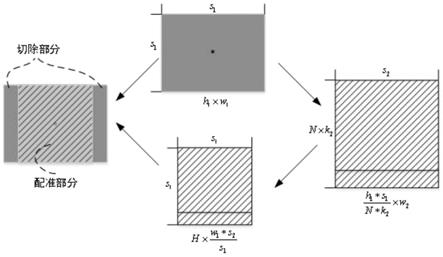
9.s4、对相互对应的面阵相机图像与光结构相机图像进行像素融合,像素融合包括结构光图像缩放处理和图像切割处理,像素融合后即完成配准;
10.所述缩放处理参数如下:
11.纵向缩放比例参数为:
12.横向缩放比例参数为:
13.配准结构光图像尺寸变为:
14.所述图像切割处理公式如下:
15.1)当时,对结构光配准图像进行两边对称切割成图像宽度为w1;
16.2)当时,对面阵图像进行两边对称切割成图像宽度为
17.3)当时,对面阵图像和结构光配准图像均不做处理;
18.则面阵相机与其对应的结构光图像以图像中心实现像素一一对应;
19.n为编码器单脉冲代表距离,表示编码器输出1个脉冲车辆实际前进的距离。
20.所述s3中,第i张面阵相机的首行图像对应结构光相机的图像序号为行号为行号为为向上取整符号,rem()为取余符号,第i张面阵相机的末行图像对应结构光相机图像序号为行号为将面阵相机图像首行与末行对应的结构光相机图像行之间的各行数据按照增序生成图像,获得第i张面阵相机图像对应的结构光相机图像;
21.其中j为单张光结构相机图像行数,d为结构光相机拍摄区域相对面阵相机视野中心滞后距离。
22.所述增序生成图像后,面阵相机图像像素尺寸为h1×
w1,横纵向分辨率均为s1,配准结构光图像像素尺寸为横向分辨率为s2,纵向分辨率为n
×
k2。
23.本发明的有益效果是:
24.通过同步采集面阵图像和线扫描图像,应用面阵图像的横纵向像素代表距离稳定的特点,以面阵相机的首行、末行与结构光相机图像的具体行进行配准,进而进行缩放至统一像素代表距离图像,再进一步将视野较大图像切割成与视野较小图像一致尺寸,实现面阵图像和结构光图像像素的一一对应。实现一一对应的工程价值:
25.1)面阵相机采用彩色成像、线扫描相机采用结构光深度成像时,可以根据彩色面阵图像对应像素的色彩为结构光相机获得的深度图像各像素进行色彩渲染,获得真彩色三维模型;
26.2)对于配准后的面阵图像、线扫描图像对,可以利用面阵相机成像无错位、扭曲特性,对线扫描图像结合特征匹配等方法进行归位校正,从而消除因线扫描相机行进路径不平直导致的目标扭曲现象。
附图说明
27.图1是本发明实施例所述一种面阵相机与光结构相机采集图像配准方法的图像对应示意图;
28.图2是本发明实施例所述一种面阵相机与光结构相机采集图像配准方法的图像切割示意图;
29.图3是本发明实施例所述一种面阵相机与光结构相机采集图像配准方法的相机安装示意图;
30.图4是本发明实施例所述一种面阵相机与光结构相机采集图像配准方法的控制结构图。
具体实施方式
31.下面结合附图对本发明的实施例作进一步说明。
32.实施例:
33.如图1-图4所示,一种面阵相机与光结构相机采集图像配准方法,在结构上包括面阵相机单元与光结构相机单元,其中面阵相机单元的面阵相机垂直向下安装,面阵光源照射中心与面阵相机拍摄区域中心重合,光结构相机单元包括激光器与结构光深度相机,激光器为线激光,垂直向下安装,结构光深度相机倾斜安装,拍摄区域中心线与激光线重合,激光线与面阵相机拍摄矩形区域横向平行,激光线与面阵相机拍摄区域中心距离dmm。
34.在使用的时候,同步触发模块的脉冲计数器接收编码器脉冲信号,编码器单脉冲代表距离mm,stm32存储的面阵相机、结构光相机触发分频数分别为、;脉冲计数器检出个原始编码器脉冲后在同步触发模块的脉冲输出口1输出1个面阵相机触发脉冲,面阵相机采集1张面阵图像并以自然数增序命名;脉冲计数器检出个原始编码器脉冲后在同步触发模块的脉冲输出口2输出1个结构光相机触发脉冲,结构光相机采集1行结构光数据,当采集满j行结构光数据后生成1张结构光图像并以自然数增序命名。
35.工控机负责面阵相机和结构光相机的采集控制和数据配准。采集控制参数设置和工作控制,参数设置包括相机曝光时间、感兴趣区域,工作控制包括相机启动、触发信号清零、采集开始、采集停止。
36.具体方法包括如下步骤:
37.s1、在同样位置同时使用面阵相机与光结构相机采集图像;
38.s2、定义面阵相机采集的图像横纵向分辨率为s1、图片尺寸为h1×
w1,定义结构光相机的图像为每张j行,每张的横向像素为w2,横向分辨率为s2;
39.s3、获取第i张面阵相机图像视野区域对应的结构光相机图像;
40.s4、对相互对应的面阵相机图像与光结构相机图像进行像素融合,像素融合包括结构光图像缩放处理和图像切割处理,像素融合后即完成配准;
41.所述缩放处理参数如下:
42.纵向缩放比例参数为:
43.横向缩放比例参数为:
44.配准结构光图像尺寸变为:
45.所述图像切割处理公式如下:
46.1)当时,对结构光配准图像进行两边对称切割成图像宽度为w1;
47.2)当时,对面阵图像进行两边对称切割成图像宽度为
48.3)当时,对面阵图像和结构光配准图像均不做处理;
49.则面阵相机与其对应的结构光图像以图像中心实现像素一一对应;
50.n为编码器单脉冲代表距离,表示编码器输出1个脉冲车辆实际前进的距离。
51.第i张面阵相机的首行图像对应结构光相机的图像序号为行号为号为为向上取整符号,rem()为取余符号,第i张面阵相机的末行图像对应结构光相机图像序号为行号为将面阵相机首行与末行对应的结构光相机的图像行之间各行数据按照增序生成图像,获得第i张面阵相机图像对应的结构光相机图像;
52.其中j为单张结构光相机图像行数,d为结构光相机拍摄区域相对面阵相机视野中心滞后距离。
53.增序生成图像后,面阵相机图像像素尺寸为h1×
w1,横纵向分辨率均为s1,配准结构光图像像素尺寸为横向分辨率为s2,纵向分辨率为n
×
k2。
54.完成目标区域采集后,系统停止。
55.以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。