1.本公开涉及用于导航和自动目标识别的组件和方法,并且更具体地涉及用于具有中体相机/传感器导航和自动目标识别的军械(ordnance)的制导组件。
背景技术:
2.用于将军械、导弹、火箭或其它射弹制导至目标的制导系统的使用是已知的。在将军械制导至目标时,通常将军械的飞行从发射到撞击分为导航阶段和瞄准阶段。在这些飞行阶段的每一个阶段对军械的制导和控制都是基于对不同数据、信息和/或参数的了解。飞行的导航阶段,在军械发射之后,对应于军械通常像飞机一样飞行的时期。在飞行的导航阶段,有必要知道军械相对于地球的姿态或方向,即上下左右。为了确定军械的姿态,军械通常包括第一“相机”,其包括物镜组件和传感器阵列,传感器阵列固定在军械上,从而其视野(fov)通常相对于军械的纵向轴线而横向定向,即垂直于军械。第一相机的传感器阵列获取特定于导航的传感器读数。根据第一相机的这些传感器读数以及其它传感器和/或组件的数据,制导系统使用一组算法来确定军械的姿态,然后控制其飞行,直到军械接近目标,意思是直到军械距离目标在一定距离内,在该距离内可以识别目标。在这个飞行点,军械从导航阶段转变到飞行的瞄准阶段,在这个阶段,军械被制导到终结。由于军械相对于目标的接近度,在飞行的瞄准阶段,军械的轨迹至少基本上与目标对齐,即目标通常对齐在军械的前面,因此第一相机无法“看到”目标。换句话说,在飞行的瞄准阶段,目标不在第一相机的fov内。因此,包括物镜组件和传感器阵列的第二“相机”开始收集有关目标和瞄准位置的读数和信息。第二相机可以构成自动目标识别(atr)系统的一部分,并且为了增强目标读数和信息的接收,第二相机相对于军械的飞行方向通常与朝前(forward facing)方向对齐。换言之,第二相机指向前方,以便可以“看到”目标,即,在飞行的瞄准阶段期间,该目标位于第二相机的fov内。根据第二相机收集的读数和信息以及其它传感器和组件的数据,制导系统可以识别和确定目标的位置,并据此制导军械的飞行终结。
3.为了减少对多个物镜组件和传感器阵列的需要,已知一些制导系统将传感器阵列和物镜组件安装在距军械主体一定距离的军械的机翼上。在这种情况下,传感器阵列和物镜组件,由于它们在机翼上的位置,为制导系统提供了一个大的朝前方向fov。将传感器阵列和物镜组件安装在军械的机翼上会导致与制造这种机翼相关的成本增加,并且当机翼通过相应的机翼槽密封件缩回时会增加军械内的面积。
4.使用两个传感器阵列和物镜组件为制导系统提供了大的组合fov,并能够制导军械从发射到终结。然而,由于双重传感器阵列和物镜组件,这种制导系统在军械上实施可能很昂贵,并且难以在这种军械可用的少量安装空间中安装。
5.因此,本公开的一个目的是克服关于具有用于在飞行的导航阶段进行制导的一个传感器阵列和物镜组件以及用于在飞行的瞄准阶段进行atr和制导的另一个传感器阵列和物镜组件的传统制导系统的上述缺点和不足。
技术实现要素:
6.本公开的一个方面是一种制导组件,包括相机/传感器(成像器、搜索器),该相机/传感器(成像器、搜索器)具有用于检测电磁辐射(uv、可见光、nir、swir、mwir或lwir)的传感器阵列并且可以被安装到军械的主体,即,该传感器阵列具有接近竖直的fov,用于执行导航功能。也就是说,传感器阵列的fov至少基本以侧向、横向或垂直于军械的纵向轴线而定向。制导组件具有致动器,该致动器可以将传感器阵列枢转到朝前定向的位置,即,具有相对于飞行方向的前向fow,从而提供终端探测功能。制导组件还可包括窗口和窗口密封件以及用于控制军械飞行的处理电子元件。
7.在所公开系统的一个实施例中,制导组件被支撑在窗口后面的军械内,该窗口安装到军械的表面,并通过窗口密封件密封在其中从而提供对应对天气和/或其它环境条件的保护。在系统的另一个实施例中,窗口是物镜的外透镜表面。
8.由于军械的飞行轮廓被放高,因此目标总是低于军械的中心线,因此制导系统不必具有完整的360度fov。考虑到这一点,根据本公开的制导系统具有大约40到50度的fov,这将典型制导系统的光学元件减少多达75%。此外,根据本公开的制导系统的光学器件可以枢转,从而为制导系统提供80到100度之间的fov,从而使制导系统能够控制军械从发射到终结的飞行,即,在飞行的导航和瞄准阶段。
9.本公开的另一方面是提供一种制导组件,该制导组件可以在导航和瞄准模式下操作并且具有包括物镜组件和成像传感器阵列的成像器/搜索器,该成像器/搜索器可以提供测绘图像数据和终端搜索器表现。成像器/搜索器能枢转地安装在军械上。致动器耦合到成像器/搜索器并且可以被启动从而将成像器/搜索器相对于军械的纵向轴线从导航位置枢转至瞄准位置。飞行控制单元与成像器/搜索器和致动器通信,并具有处理器,该处理器分析图像数据从而提供导航飞行控制信号,用于在导航操作模式下制导军械并且在瞄准操作模式下通过自动目标识别或用于将军械制导到目标的瞄准点算法来确定目标方向。
10.本公开的另一方面是提供一种利用在导航模式和瞄准模式下操作的制导组件来制导军械的方法。该方法包括向军械提供具有单个成像器/搜索器的制导组件,该单个成像器/搜索器根据制导组件的操作模式能枢转。成像器/搜索器安装在军械内的导航位置。制导组件在导航模式下操作,用于通过飞行控制单元确定军械的姿态。然后飞行控制单元控制军械的轨迹。然后,当制导组件从在导航模式下操作切换到在目标模式下操作时,成像器/搜索器从导航位置枢转到瞄准位置。成像器/搜索器捕获并检测与目标相关的光能。通过飞行控制单元确定特定的目标信息,然后制导军械撞击目标。
11.本公开的这些方面并不意味着排它性的,并且当结合以下描述、所附权利要求书、和附图阅读时,本公开的其它特征、方面和优点对于本领域普通技术人员来说将是显而易见的。
附图说明
12.本公开的上述和其它目的、特征和优点将从以下对本公开的特定实施例的描述中变得明显,如附图中所示,其中相同的附图标记在不同视图中指代相同的部分。附图不一定按比例绘制,而是强调说明本公开的原理。
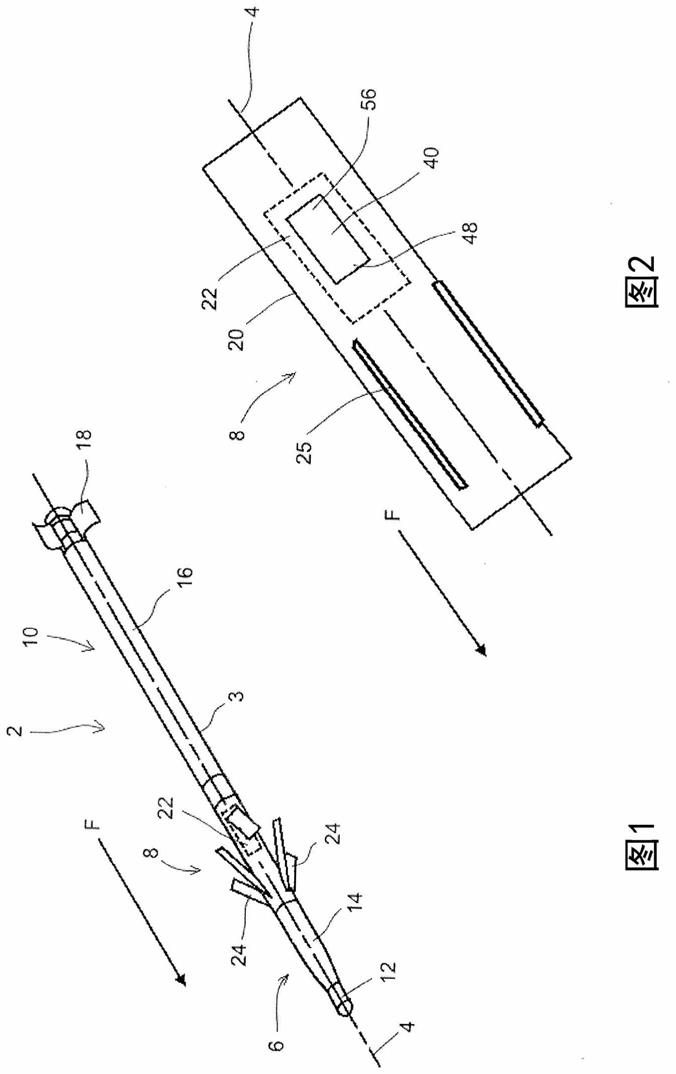
13.图1是根据本公开的具有中体制导组件的军械的示意图;
14.图2是根据本公开的制导组件的示意图,其中示出了处于关闭位置的窗口面板;
15.图3是制导组件的示意图,其中示出了处于打开位置的窗口面板;
16.图4a是中体的示意性横截面,其中示出了制导组件的第一实施例,其中成像器/搜索器处于导航位置;
17.图4b是根据图4a的制导组件的示意性横截面,其中示出了处于另一个导航位置的成像器/搜索器;
18.图5是中体的示意性横截面,其中示出了制导组件的第一实施例,其中成像器/搜索器处于瞄准位置;
19.图5a是中体的示意性横截面,其中示出了具有滑动窗口的制导组件的第一实施例;
20.图5b是中体的示意性横截面,其中示出了具有吹走窗口的制导组件的第一实施例;
21.图6是中体的示意性横截面,其中示出了制导组件的另一个实施例,其中成像器/搜索器处于导航位置;
22.图7是中体的示意性横截面,其中示出了制导组件的另一个实施例,其中成像器/搜索器处于瞄准位置;
23.图8是流程图,其中示出了利用在导航模式和瞄准模式下操作的制导组件来制导军械的方法。
具体实施方式
24.具体实施方式图1示意性地示出了军械、导弹、射弹、滑翔机或火箭,例如高级精确杀伤(apk)弹,并且在下文中简称为军械2。军械2具有基本上圆柱形的主体30,主体30限定了纵向轴线4,纵向轴线4通常对应于军械2的向前飞行方向f。相对于其飞行方向f,军械2包括头端6、中体8和尾端10。军械2的头端6部分地呈椭圆形并且可以包括引信12和弹头14,而军械2的尾端10包括火箭电动机16并且具有用于在飞行中稳定军械2的鳍片18。
25.军械2的中体8具有轴向延伸的圆柱形外壳20,该圆柱形外壳20容纳或支撑制导组件22,该制导组件22通常用于通过调整或校正军械2的轨迹来控制军械2的飞行,从而将军械2制导到选定的目标。尽管根据本公开的制导组件22被图示并描述为被支撑在军械2的中体8内,但是认识到制导组件22的至少一些部件可以布置在军械2的头端或尾端6、10中。制导组件22可以包括围绕中体8的圆周安装的多个机翼24。在军械2发射或开火之前,机翼24通常布置在收起位置,从而保护它们免受损坏和/或环境条件。例如,在收起位置,机翼24可以围绕中体8缠绕或枢转到中体8中的狭槽25(见图2)中。在军械2发射或开火之后,机翼24枢转到飞行位置,其中机翼24从中体8延伸到沿军械2的气流中。机翼24可以具有空气控制表面,例如鸭翼(canards),其在飞行期间与气流连通并且可调节至从而控制、改变或校正飞行中的军械2的轨迹。
26.制导组件22还包括成像器/搜索器26,其包括例如半有源激光(sal)搜索器、长波红外(lwir)、短波红外(swir)成像器、或射频(rf)归航搜索器中的一个或多个。成像器/搜索器26通常包括物镜组件28和传感器阵列30。物镜组件28位于成像器/搜索器26的头端29并且被配置为将光能(例如电磁辐射、激光能量或红外光能量)捕获和聚焦到传感器阵列30
上,传感器阵列30检测光能并将相应的传感器信号或图像数据传输到飞行控制单元32,用于测绘和终端搜索器执行。飞行控制单元32具有连接到电源的处理器和数据存储元件,其功能是分析传感器信号或图像数据并建立用于控制军械飞行的控制信号2。这里使用的测绘和终端搜索器执行是指成像器/搜索器26在飞行的导航和瞄准阶段被制导组件22使用的能力。制导组件22可以包括一个或多个附加传感器和/或测量组件33,例如全球定位系统(gps)、惯性测量单元(imu)、激光测距仪(lrf),其可以收集和/或测量测绘、导航、运动、力、范围和/或距离读数/数据,并将读数/数据通信或传送到飞行控制单元32以供分析和考虑,例如,确定军械2的姿态并通过机翼/空气控制表面24控制军械2的飞行。根据读数/数据,飞行控制单元32收集“图像”,然后基于军械2的高度缩放收集的图像并对图像(由军械的姿态引起的图像的扭曲)进行去扭曲。随后,飞行控制单元32将收集到的图像与远程或本地图像数据库进行比较,从而确定军械2的地面位置。
27.根据本公开的制导组件22仅包括一个物镜组件28和传感器阵列30,其形成单个成像器/搜索器26,该单个成像器/搜索器26可以根据制导组件22正在以不同模式中的哪一个来操作而被支撑在中体8中的不同位置。如以下将进一步详细讨论的,在飞行的导航阶段期间,制导组件22在导航模式下操作,其中军械2像飞机一样飞行。在导航操作模式中,成像器/搜索器26被固定在面向侧面的位置。在该位置,成像器/搜索器26收集并提供数据,这些数据被制导组件22用于执行测绘功能,“测绘执行”,即,用于从飞行的发射到转变到瞄准阶段跟踪和制导军械并确定军械相对于地球的姿态或方位。在飞行的瞄准阶段期间,制导组件22以瞄准模式操作,其中目标细节被确定并且军械2被制导至终结。当制导组件22以瞄准模式操作时,成像器/搜索器26朝向纵向轴线枢转至如下所述的面向前方的位置。在该位置,成像器/搜索器26具有目标所在位置的fov,并收集数据并将数据提供给制导组件22以用于终端搜索器执行。在终端搜索器执行期间,制导组件22使用atr或瞄准点算法,分析来自成像器/搜索器26以及其它传感器和/或测量组件33的数据,从而检测或区分“图像”内的目标,然后分类并确定目标。制导组件22基于这些确定而将目标处的军械制导到终结。
28.在根据本公开的制导组件22的一个实施例中,成像器/搜索器26包括sal搜索器,该sal搜索器具有使成像器/搜索器26能够打开到40到50度之间的fov的视点成像器。成像器/搜索器26具有从物镜组件28的中间延伸并限定fov的中心的中心轴线34,如图所示。成像器/搜索器26可以包括多个传感器配置并且为成像器/搜索器26提供高达6公里的检测范围和0.1%准确度的检测角度。
29.通常,成像器/搜索器26与飞行控制单元32通信,传输与由物镜组件28捕获并聚焦在其上的光能相关的传感器信号。从这些传感器信号以及从一个或多个附加传感器和/或测量组件33(即gps、imu和lrf)接收到的读数/数据,飞行控制单元32可以确定上、下、右和左方向,以及关于目标的特定读数和信息,包括目标的身份、位置和行动,例如用于atr目的。利用单个物镜组件28和传感器阵列30,飞行控制单元32根据制导组件22在导航模式下还是定位模式下运行,使用atr或瞄准点算法来分析传感器信号和来自一个或多个附加传感器和/或测量组件33的读数/数据。
30.在导航模式中使用图像,制导组件22以1至10hz捕获地形图像,并将图像与例如卫星图像的国家数据库进行比较。比较首先根据军械相对于地面的高度(放大或缩小)和姿态(俯仰和偏航)缩放捕获的图像。基于图像的导航提供类似于gps的性能,具体取决于军械的
高度和速度。
31.通过使用波浪作为参考并保持相对于波浪方向的飞行路径,可以在公海上完成导航(仅姿态)。
32.如上所述,成像器/搜索器26在制导组件22的导航和瞄准操作模式下都起作用。在军械2发射之后,制导组件22在导航模式下操作从而将军械2制导到所选目标的大致方向。在这种操作模式中,军械由制导组件22像飞机一样飞行,如上所述,这需要知道军械2相对于地球的姿态。为了便于确定军械沿其相对于地球的飞行方向f的上下方向和左右方向,成像器/搜索器26位于面向侧面的位置,如图4a、图4b和图6所示。在面向侧面的位置(以下称为导航位置),成像器/搜索器26的中心轴线34基本上垂直于军械的纵向轴线4并且成像器/搜索器26至少是基本上包含在中体8的外壳20的内部36内。成像器/搜索器26的头端29径向向外,并且邻接或紧邻面板或窗口40的内表面38,该内表面38对光能是透明的。面板或窗口40形成为装配在中体8中的开口42内并包围该开口42,并且在例如图2、图4a和图4b所示的关闭位置与外壳20的外表面44至少基本齐平。在导航位置,整个成像器/搜索器26位于封闭面板或窗口40后面的军械2内,使得成像器/搜索器26受到保护,例如,与环境因素(例如灰尘、污垢和雨水)隔离,以及与例如由人员在处理过程中和/或由集群发射中的其它武器造成的潜在损害隔离。为此目的,开口42的周边可以设置有窗口密封件41(参见图6),其布置在面板或窗口40与外壳20之间。面板或窗口40可以由使光能或电磁辐射能够自由地通过其到达物镜组件28的材料而形成。
33.应当理解,在导航位置,成像器/搜索器26可以固定在另一个外壳20的内部36内,使得中心轴线34在飞行方向f中上相对于纵向轴线4以钝角对齐。换句话说,中心轴线34在向后或向背的方向上对齐,即,与飞行方向f相反,如图4b所示。在成像器/搜索器26定位成使得中心轴线34向后成角度的情况下,fov可以包括发射位置。如果军械2由位于发射平台上或附近的开火控制系统发射,该开火控制系统向军械2传输信号(例如,脉冲信标),该信号到由成像器/搜索器26捕获并启用飞行控制单元32从而跟踪军械2的姿态并确定军械2在飞行期间的俯仰、滚动和偏航,则这是特别有益的。在根据本公开的制导组件22的一个实施例中,成像器/搜索器26包括lwir成像器,其可以接收来自火力控制系统的lwir发射器的信号,该信号使飞行控制单元32能够确定军械2的姿态以及军械2相对于发射位置的航向。在另一个实施例中,成像器/搜索器26包括sal搜索器,其可以接收发射平台上的脉冲信标的信号以促进建立军械2的姿态,并且具有高度传感器和磁力计作为附加传感器和/或测量部件33,用于确定军械2的高度和向上方向。
34.在飞行期间,军械2从飞行的导航阶段转变到飞行的瞄准阶段,其中制导组件2从导航操作模式切换到瞄准操作模式。在此切换期间(将在下面更详细地讨论),成像器/搜索器26从导航位置移动到大体朝前定向的位置,即,fov相对于飞行方向f朝纵向轴线向前方的位置。成像器/搜索器26的朝前定向的位置在下文中称为其瞄准位置,并在图5、图5a、图5b和图7中示出。在瞄准位置,目标至少基本上位于成像器/搜索器26的fov中,使得基于由物镜组件28捕获并由传感器阵列30检测到的光能,制导组件22能够识别选定的目标并精确地制导军械撞击目标。
35.从导航模式中的成像器/搜索器26的竖直布置到成像器/搜索器26的朝前定向的位置的转变也可以是受控转变。当军械2接近目标时,大的fov传感器,例如,具有45
°
的fov
被向前偏置到距最低点10
°
到55
°
。这允许导航(距最低点10
°
的像素)和目标搜索,其中像素位于地平线外35
°
倾斜角。一旦目标被识别并且由制导组件22实施终结制导,军械2开始向下俯冲,需要致动器50将传感器阵列30旋转到朝前定向的位置,即,在飞行方向上向前看f或直接看到目标。
36.在图4a、图4b、图5、图5a和图5b中所示的制导组件22的一个实施例中,成像器/搜索器26的头端29通过位于开口42的前端47的铰链、枢轴、心轴或关节46而耦合到中体8的外壳20的开口42。致动器50在距头端29一定距离处连接到成像器/搜索器26。致动器50和关节46可以在军械2飞行的导航阶段期间将成像器/搜索器26维持或保持在导航位置,并且可以被飞行控制单元32激活从而将成像器/搜索器36移动到瞄准位置从而用于飞行的瞄准阶段。在瞄准位置,成像器/搜索器36至少部分地位于外壳20的外侧。应当理解,致动器50可以是mems致动器、螺线管或电磁致动器中的一种或多种,其可以是电动的。致动器50也可以是加载弹簧的致动器,其通过弹簧力偏压成像器/定位器26,例如当保持成像器/定位器26的闩锁被释放时。为了移动到瞄准位置,成像器/搜索器26的尾端52被启动器50偏压在与飞行方向f相反的方向上,即朝向军械2的尾端。通过在开口42的前端47处固定到外壳20上的成像器/搜索器26的头端29,成像器/搜索器26枢转使得头端29穿过开口42突出到外壳20的外侧并且通常朝前定向,即飞行方向f。具体地,在成像器/搜索器26的瞄准位置,其中心轴线34相对于在飞行方向f中的纵向轴线4成锐角对齐,即,中心轴线34在飞行方向f上向前延伸,使得整个fov与朝前方向对齐(例如参见图5、图5a、图5b)。如图所示,成像器/搜索器26延伸穿过外壳20中的开口42,使得成像器/搜索器26的头端29径向地位于中体8的外侧。为了使成像器/搜索器26的头端穿过开口42,面板或窗口40被枢转到打开位置,使得面板或窗口40的前端48与外壳20的外表面44间隔开,例如如图1、图3和图5所示。在一个实施例中,面板或窗口40的尾端56通过枢轴或铰链49固定到外壳20(见图5)。在又一个实施例中,面板或窗口40可以是沿外壳20的表面缩回或滑动的滑动窗口(参见图5a)。滑动窗口40是有益的,因为窗口40缩回从而位于外壳20上,从而至少最小化它在展开到打开位置时可能对军械2产生的任何可能的负面空气动力学影响。在另一个实施例中,窗口40可以是简单的“吹走”窗口,当成像器/搜索器26枢转并接触窗口40的前端48时,它会从开口42中弹出或推出。在这种情况下,吹走窗口40在打开时简单地从军械2上脱落(见图5b)。这种吹走窗口40是有益的,因为窗口40对军械2没有负面空气动力学影响,并且在将窗口40固定或安装在开口42中时需要最小的努力。
37.面板或窗口40可以固定到外壳20上,使得当成像器/搜索器26枢转到瞄准位置时,面板或窗口40被简单地推出开口42从而从军械2上脱落。在成像器/搜索器26的瞄准位置,径向远离军械2的主体,fov的一个边缘沿着外壳20的外表面44对齐,并且基本上平行于或略微朝向纵向轴线成角度4。这为制导组件22提供了沿飞行方向f的纵向视野,该纵向视野将包括目标,例如整个fov沿飞行方向f向前延伸。
38.在图6和图7中所示的制导组件22的另一个实施例中,成像器/搜索器26的头端29通过位于开口42的尾端58处的铰接件46而耦合到中体8的外壳20上。由于制导组件的这个实施例与上述实施例非常相似,下面仅描述不同之处。随着成像器/搜索器26的头端29在面板或窗口40的尾端56处固定到外壳20,成像器/搜索器26枢转,使得头端29通常朝前定向,但在此外壳完全保持在外壳20的内部36内。这种配置使透明面板或窗口40能够保持固定在
中体8的开口42中并且消除了成像器/搜索器26暴露于环境和由于将成像器/搜索器26延伸到气流中而引起的军械2上的空气动力学影响。在如图7所示的成像器/搜索器26的瞄准位置,中心轴线34在飞行方向f上相对于纵向轴线4成锐角对齐。尽管这为制导组件22提供了在包括目标在内的飞行方向f上的朝前定向的竖直fov,与上述实施例相比,可以限制朝前定向的fov。
39.参见图8的流程图示出了根据本公开的在导航模式和瞄准模式下操作的利用制导组件22制导军械2的方法。最初,在s10,为军械2提供具有单个成像器/搜索器26的制导组件22,该单个成像器/搜索器26可以根据制导组件22的操作模式相对于军械2的纵向轴线4重新对准。在s20,成像器/搜索器26安装在军械2的内部36内的导航位置,其中成像器/搜索器26的中心轴线34至少基本上垂直于军械2的纵向轴线4。在军械2发射之后,即例如,在飞行的导航阶段,在s30,制导组件22在导航模式下操作,使得成像器/搜索器26的fov相对于飞行方向f朝向下方并且成像器/搜索器26在其中捕获和检测光能。在s40,在制导组件22的导航操作模式中,飞行控制单元32从信号确定军械2的姿态,所述信号对应于由成像器/搜索器26检测并从其传输的光能,以及来自一个或多个附加传感器和/或测量组件的读数/数据。在s50,基于所确定的军械2的姿态,飞行控制单元32调整机翼/空气控制表面24的对准以控制军械的轨迹并且使军械像飞机一样沿目标的方向飞行。随着军械2接近目标,在s60,制导组件22将从导航操作模式切换到瞄准操作模式。
40.制导组件22的操作模式中的切换可以由飞行控制单元32启动,例如当它确定军械2在目标的一定距离内或当它识别出特定的地标或地形特征时接近目标,甚至在设定的飞行时间后。
41.从导航模式中的成像器/搜索器26的竖直布置到成像器/搜索器26的朝前定向的位置的转变也可以是受控转变。当军械2接近目标时,一个大的fov传感器(例如具有45
°
的fov)被向前偏置到距最低点10
°
到55
°
。这允许位于距地平线外35
°
倾斜角的像素的导航(距最低点10
°
的像素)和目标搜索。一旦目标被识别并且由制导组件22实施终结制导,军械2开始向下俯冲,需要致动器50将传感器阵列30旋转到朝前定向的位置,即,在飞行方向f上向前看或直接看到目标。
42.如果制导组件22设置有目标范围,则成像器/搜索器26可以简单地从导航模式切换到瞄准目标模式,以基于预期到目标的飞行距离或飞行时间和飞行终结时的高度和机动性对军械进行终端制导,或通过在成像器/搜索器26的fov内检测目标,依靠imu的能力来保持航向而不在转变期间增加显著漂移。
43.在从导航操作模式切换到瞄准操作模式时,在s70,飞行控制单元32启动致动器50,使成像器/搜索器26从导航位置枢转到瞄准位置,其中成像器/搜索器26的中心轴34在飞行方向f上相对于军械2的纵向轴线4成锐角。在s80,在瞄准位置,在飞行的瞄准阶段,成像器/搜索器26具有朝前定向的fov,即,飞行方向f,并且其中成像器/搜索器26捕获和检测与目标相关的光能。在s90,借助从成像器/搜索器26传输的与由此检测到的光能相对应的信号,以及来自一个或多个附加传感器和/或测量组件33的读数/数据,飞行控制单元32确定特定读数和有关目标的信息,包括目标的身份、位置和行动,例如用于atr目的。在s100,基于确定的特定读数和关于目标的信息,飞行控制单元32调整机翼/空气控制表面24的对准以制导军械2撞击目标。
44.尽管本文已经描述了本公开的原理,但是本领域技术人员应当理解,本描述仅作为示例而不是作为对本公开范围的限制。除了在此示出和描述的示例性实施例之外,其它实施例被设想在本公开的范围内。本领域普通技术人员的修改和替换被认为在本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。