1.本发明涉及一种水下导航装置,具体的,是一种水下光纹罗盘装置,属于水下导航定位技术领域。
背景技术:
2.水下无人航行器(unmanned underwater vehicle,uuv)是海洋探测、开发的重要工具,精准的水下定位方法是顺利完成各种任务的重要保障。由于水介质对无线电波的强烈吸收效应,卫星导航定位系统无法应用于uuv。目前常用的水下定位技术主要有惯性导航、水声导航定位、地球物理导航定位,惯性导航系统和水下声学导航技术发展得比较成熟。但是,惯性导航误差随时间累积,导航精度低;水声导航需要搭载水听器,存在传输时间延迟、易受水下环境影响等问题。两者的性能受到成本、范围以及uuv任务校正周期的限制。虽然通过使用auv任务海域的现有地图,地球物理导航系统可以提供较为廉价并更为准确的定位导航方法,但是水下地形地貌不确定因素多,精确的地磁场分布图、重力场分布图、海底地形图和海流数据库难以获取,地图获取和地貌特征识别困难,限制了这些方法的使用。偏振光导航是受昆虫自主导航和觅食能力的启发,为水下导航提供一种新的解决方案。生物学研究表明,昆虫和其他动物的大脑能够在复杂的环境中实现稳健而高效的定位与导航。水生动物也可以检测出偏振光以进行水下航行,鲑鱼、螃蟹、金鱼、墨鱼等水生动物可以区分e-vector方向并表现出对偏振光的反应。螳螂虾可以感知偏振光,并在觅食后导航回到家中。已有的研究成果表明,基于偏振光技术的导航方法具有完全自主、误差不随时间累积和实时性好等优点,是一种行之有效的新型水下导航手段。国内外对于水下偏振光导航定位技术及系统的研究,集中于两个方面,一是通过理论推导论证水下偏振管导航的可行性,二是研究水下偏振光的传输模型为水下偏振导航提供理论依据。相关处于理论探索阶段,尚未检索到有效的检测与记录手段。发明人认为,水下偏振光导航定位没有积累误差,也不需要精确的地磁分布和海流数据,是经典导航方法的有效补充。
技术实现要素:
3.针对目前的导航定位技术受水下环境限制,不能满足uuv定位精度等要求,本发明旨在提供一种水下光纹罗盘装置,能够在水下环境中进行较为准确的方位角识别,以满足水下航行设备的定位和导航需求。本发明的目的是提供一种水下偏振光定位装置,称之为光纹罗盘装置。为实现上述目的,本发明公开下述技术方案:本发明提供一种水下光纹罗盘装置,包括成像部分和处理显示部分,成像部分包括偏振片、机械装置及其控制装置、成像装置以及相应的成像控制器,处理显示部分由数字光谱处理器完成,其功能包括图像信号处理分析模块、偏振光纹生成模块、基准方向判定和显示模块。
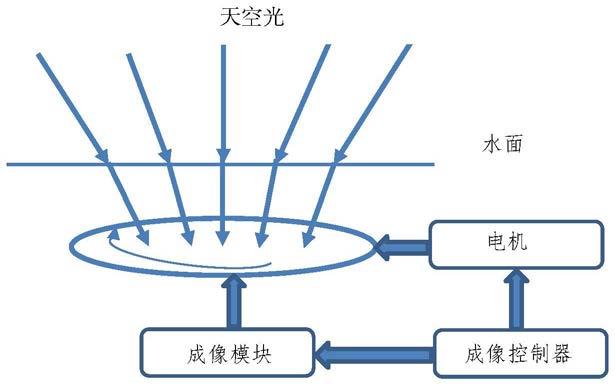
进一步:所述成像部分,在成像控制器的控制下,通过偏振检测装置中内置的偏振片转动,将天空光分离成不同偏振状态的偏振光;使用成像模块拍摄记录不同偏振状态下的天空光的偏振图像;之后,将拍摄记录的偏振信息发送到数字光谱处理器中;进一步:所述偏振控制系统还包括偏振片、驱动偏振片转动的电动机械装置、控制偏振片转动的成像控制器,该偏振系统用于控制偏振片转动,保证偏振片在规定的时间内完成对天空光的分离,便于偏振成像系统拍摄记录;进一步:所述偏振成像系统包括低照度高清晰度的成像设备,该成像设备选用超广角鱼眼镜头,保证能最大限度的拍摄天空光的分布;控制偏振片转动和成像设备完成成像控制器,保证低照度高清晰度相机能跟随偏振片移动,使得低照度高清晰度成像设备能跟随偏振片转动拍摄记录不同角度的偏振光。进一步:所述成像模块在同一位置、不同时间重复成像;进一步:所述处理显示部分,使用数字光谱处理器将记录下来的不同偏振状态的偏振图像进行图像处理,获取天空光各个波长的偏振分布特征图像,并通过偏振光纹生成模块,生成具有波长、亮度和偏振分布的天空光纹;进一步:所述数字光谱处理器中的信号处理分析模块先根据时间、经纬度等信息检索系统数据库中历史光纹以及天空光的位置信息,分析出基准“正北”方向,并将基准方向传输到显示模块上加以显示。与现有技术相比,本发明取得以下有益效果:1)本发明提供的水下光纹罗盘装置,该装置在成像控制器的控制下,通过偏振系统中内置的偏振片转动,将天空光分离成不同偏振状态的偏振光;2)本发明中,使用成像模块拍摄记录不同偏振状态下的天空光的偏振图像;3)本发明中,使用光谱分析模块将记录下来的不同偏振状态的偏振图像集进行图像处理,获取天空光各个波长的偏振分布特征图像,并生成具有波长、亮度和偏振分布的天空光纹;4)本发明中,信号处理分析模块先依据时间、经纬度和历史光纹信息,判断基准“正北”方向,并将方向显示在显示模块上;5)本发明中,基准方向判定模块应用人工智能算法对历史数据进行聚类分析,不产生积累误差,随着数据量的增加,判定精度逐步提高。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。图1为水下光纹罗盘成像控制器控制成像系统结构框图,作为实施例1的结构示意图图2水下光纹罗盘分光成像系统结构框图,作为实施例2的结构示意图图3水下光纹罗盘图像处理部分结构框图,作为实施例1和实施例2的图像处理步骤示意图
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。正如背景技术所述,基于偏振光技术的导航方法具有完全自主、误差不随时间累积和实时性好等优点,是一种行之有效的新型水下导航手段,本发明旨在提供一种水下光纹罗盘,能够在水下判断出基准“正北”方向,并通过显示模块显示。下面结合附图和具体实施例对本发明的具体实施方式做进一步说明。实施例1一种水下光纹罗盘装置,结合图1和图3,包括成像部分和处理显示部分,成像部分包括偏振片、电动机械装置、成像装置以及相应的成像控制器,处理显示部分由数字光谱处理器完成,其功能包括图像处理分析模块、偏振光纹生成模块、基准方向判定和显示模块;该方法包括以下步骤:步骤1:在成像控制器的控制下,通过偏振系统中内置的偏振片转动,将太阳光分离成不同偏振状态的偏振光;使用成像模块拍摄记录不同偏振状态下的天空光的偏振图像,之后将拍摄记录的偏振信息发送到数字光谱处理器中;在偏振系统中包括偏振片、驱动偏振片转动的电动机械装置、控制偏振片转动的成像控制器,该偏振系统用于控制偏振片转动,保证偏振片在规定的时间内完成对太阳光的分离,便于偏振成像系统拍摄记录;偏振成像系统包括低照度高清晰度的成像设备,该成像设备的镜头为超广角鱼眼镜头,保证能最大限度的拍摄天空光的分布;控制偏振片转动和成像设备完成成像控制器,保证低照度高清晰度相机能跟随偏振片移动,使得低照度高清晰度成像设备能跟随偏振片转动拍摄记录不同角度的偏振光。如图1所示,具体的,太阳光为自然光,在大气中发生散射和折射,天空各处散射后的太阳光偏振角发生改变,散布于天空各处的散射点,形成天空光,天空光进入海水时产生折射,且在向下传输过程中,随着水深的增加偏振度进一步改变。该装置在水下工作时,观测的天空光经过水面折射散射后180度的视角被压成约为97度的光锥,光锥内的光束会射入成像系统中的偏振片,成像系统中的偏振片每0.1s发生转动,转动角为θ,使得成像系统在1-2s短时间内完成对天空光的分离,分离成不同偏振角的偏振光;与此同时成像系统内的低照度单反照相机在偏振片每转动θ拍摄记录一次,一共拍摄360/θ张照片记录偏振光的偏正状态。步骤2:使用数字光谱处理器将记录下来的不同偏振状态的偏振图像集进行图像处理,获取天空光各个波长的偏振分布特征图像,并通过偏振光纹生成模块生成具有波长、亮度和偏振分布的天空光纹;如图3所示,数字光谱处理器其功能包括图像信号处理分析设备、偏振光纹生成模块及基准方向判定模块;数字光谱处理器的主要部分为图像信号处理分析设备,用于处理
偏振成像装置传来的偏振图像集,实现某一波长天空光偏振分布特征的测量。偏振光纹生成模块根据数字光谱处理器中获取天空光各个波长的偏振分布特征图像信息中的波长信息,将其中可见光谱(390nm-780nm)部分的波长分成n份,并把亮度和偏振分布按照波长绘制成特殊波长的天空光纹,例如红光的波长在622nm-760nm,取出不同偏振状态下波长在622nm-760nm的光谱,按照偏振方向分布绘制成红光分布光纹;橙光(579nm-622nm)、黄光(577nm-597nm)、绿光(492nm-577nm)、青光(450nm-492nm)、蓝光(435nm-450nm)、紫光(390-435nm)等其他颜色分布光纹与红色分布光纹处理方式相同,最后将n份特殊波长的天空分布光纹传送给信号处理分析模块。步骤3:数字光谱处理器中的信号处理分析模块,先根据时间、经纬度等信息检索系统数据库中历史光纹以及太阳光的位置信息,最后基准方向判定进行比较分析判断出基准“正北”方向,并将基准方向传输到显示模块上加以显示。天空光纹包括的信息有波长、亮度、偏振分布等信息。信号处理分析模块首先根据计时模块的时间,以及当地的经纬度,在数据库中检索经纬度相同、同日同时间不同年份的天空分布光谱,并使用基准方向判定模块将偏振光纹生成模块生成的天空分布光谱比较偏振状态、亮度等因素,因为在同日同时间不同年份下偏振分布是相同的,亮度则会因为天气、云层状况存在稍许的影响,在基准方向判定模块系统中会将亮度这一参数作为辅助参考量判断,当偏振分布信息相同且亮度在误差范围内,就可以通过历史光纹信息校准等方式,获取校准后的太阳方向,再根据比较后天空分布光纹的差异计算出基准“正北”方向。实施例2一种水下光纹罗盘装置,包括成像部分和处理显示部分,其成像可以由成像控制实现如实施例1中图1所示,也可以由盘分光成像系统实现,如图2所示。该方法包括以下步骤:水下布置多个分光成像模块,分别由偏振片1 成像模块1,偏振片2 成像模块2,
……
,偏振片k 成像模块k构成,为保证测量精度,偏振片不少于6片,偏振片的角度,相差360/k度。不同角度的偏振片,将太阳光分离成不同偏振状态的偏振光。使用成像模块拍摄记录不同偏振状态下的天空光的偏振图像,偏振成像系统包括低照度高清晰度的成像设备,该成像设备的镜头为超广角鱼眼镜头,保证能最大限度的拍摄天空光的分布。之后将拍摄记录的偏振信息发送到数字光谱处理器中。数字光谱处理器中的信号处理分析模块,先根据时间、经纬度等信息检索系统数据库中历史光纹以及太阳光的位置信息,最后基准方向判定进行比较分析判断出基准“正北”方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
