1.本技术涉及生物安全柜的领域,尤其是涉及一种带有智能检测功能的生物安全柜。
背景技术:
2.生物安全柜是能防止实验操作处理过程中某些含有危险性或未知性生物微粒发生气溶胶散逸的箱型空气净化负压安全装置,其广泛应用于微生物学、生物医学、基因工程、生物制品等领域的科研、教学、临床检验和生产中,是实验室生物安全中一级防护屏障中最基本的安全防护设备。
3.公告号为cn215234284u的中国专利的公开了一种具有防尘防潮功能的生物安全柜,包括生物安全柜本体,所述生物安全柜本体的顶部固定安装有负压风机,负压风机的吸气端与生物安全柜本体内部相连通,生物安全柜本体的一侧固定安装有固定盒,固定盒内固定安装有挡尘滤网和吸气扇,且吸气扇位于挡尘滤网的下方,固定盒远离生物安全柜本体的一侧固定安装有第一吸气管,第一吸气管与固定盒内部相连通,固定盒内固定安装有两个位于吸气扇下方的过滤网,可避免灰尘和水汽进入生物安全柜本体内部,保证生物安全柜本体正常使用。
4.但是在生物安全柜的使用活动中,会有不同的工作人员操作生物安全柜,不同的工作人员身高体型不同,生物安全柜的高度可能与工作人员存在不适合的情况,在长期的实验过程中,可能会使工作人员产生过度疲劳,影响实验效率。
技术实现要素:
5.为了提高工作人员身高体型与生物安全柜的配合度,减少工作人员疲劳度,从而提高实验质量和效率,本技术提供一种带有智能检测功能的生物安全柜。
6.本技术提供的一种带有智能检测功能的生物安全柜采用如下的技术方案:一种带有智能检测功能的生物安全柜,包括支撑架,所述支撑架上设有柜体,所述柜体一侧开设有窗口,所述支撑架靠近所述窗口的一侧设有支撑座,所述支撑座上方设有座椅,所述支撑座和所述座椅之间设有升降组件,所述窗口的下边缘处设有用于支撑并检测小臂角度的检测组件,所述检测组件电连接有控制器,且所述控制器与所述升降组件电连接。
7.通过采用上述技术方案,当工作人员坐在座椅上后,工作人员小臂搭接在检测组件上,当工作人员的身高与柜体的高度不配合时,工作人员的小臂搭接在窗口的下边缘并存在夹角,此时检测组件检测小臂和窗口的夹角,并将检测信号传递到控制器中,控制器则控制升降组件运行,使座椅上升或下降,直至检测组件检测到小臂与窗口的夹角变小到适合的范围,即小臂和窗口的下边缘大致保持水平的状态,由此自动检测并调整工作人员在操作生物安全柜时的高度,提高工作人员身高体型与生物安全柜的配合度,减少工作人员疲劳度,从而提高实验质量和效率。
8.可选的,所述柜体上开设有位于所述窗口下边缘的凹槽,所述检测组件包括设置在所述凹槽内并且与所述柜体转动连接的托板,所述托板上设有第一压力传感器,所述凹槽内还设有用于检测所述托板和所述柜体转动角度的角度传感器,所述第一压力传感器和所述角度传感器均与所述控制器电连接。
9.通过采用上述技术方案,工作人员的小臂搭接在托板上,此时第一压力传感器将信号传递到控制器内,此时小臂压动托板转动,角度传感器检测到托板和柜体之间的转动角度,并将信号传递到控制器内,控制器则控制升降组件升高或降低,由此调整座椅的高度,直至角度传感器检测到夹角范围处于控制器内预设的允许范围,控制器控制升降组件停止升降,随后工作人员小臂脱离,控制器不再接收到小臂对托板的压力信号,此时即使托板发生转动,角度传感器检测的信号也不会使控制器操作升降组件运行,由此保证座椅的稳定性。
10.可选的,所述托板两端均固定有支撑弹簧,所述支撑弹簧同时与所述凹槽的槽底连接。
11.通过采用上述技术方案,托板两端的支撑弹簧对托板进行支撑,托板在无外力的作用下保持水平,由此托板在转动后能够快速且自动归位。
12.可选的,所述凹槽处设有端盖,所述端盖远离所述柜体一侧的两端均设有导向杆,所述凹槽上相对的两个槽壁上均开设有竖直的导向槽,所述导向杆插接在对应的导向槽内,且与导向槽滑动连接,所述端盖另一侧的下端设有卡块,所述端盖通过所述卡块与所述凹槽的槽壁过盈配合。
13.通过采用上述技术方案,端盖在导向杆和导向槽的配合下沿竖直方向移动,当端盖下端与凹槽的槽底抵接时,卡块与凹槽的槽壁过盈配合,将端盖和柜体卡接,从而将检测组件保护在凹槽内,当需要打开端盖时,按压端盖两侧,并向上移动端盖,直至端盖打开,从而使检测组件能够被使用。
14.可选的,所述升降组件包括升降柱,所述升降柱一端插接在所述支撑座上且与支撑座滑动连接,所述升降柱的另一端与所述座椅可拆卸连接,所述升降柱内设有与所述升降柱平行的升降丝杠,所述升降丝杠的一端与所述支撑座转动连接,所述升降丝杠的另一端与所述升降柱螺纹连接,所述底座内部设有驱动升降丝杠转动的升降电机,所述升降电机与所述控制器电连接。
15.通过采用上述技术方案,控制器控制升降电机启动,升降电机驱动升降丝杠驱动升降柱沿升降丝杠的轴线平移,升降柱带动座椅同步移动,从而调整座椅的高度。
16.可选的,所述支撑座下端面设有滚轮,所述支撑架和所述支撑座之间设有驱动支撑座移动的移动组件。
17.通过采用上述技术方案,移动组件驱动支撑座移动,从而调整支撑座和支撑架之间的距离,由此调整座椅与柜体之间的距离,从而适应不同工作人员的体型,进而达到满足不同的体态姿势的需求。
18.可选的,所述移动组件包括连接杆,所述连接杆一端与所述支撑座固定连接,所述连接杆的另一端与所述支撑架滑动连接,所述移动组件还包括设置在支撑架上的移动电机,所述移动电机与所述控制器电连接,所述移动电机的输出轴上设有与所述连接杆同轴线的移动丝杠,所述移动丝杠与所述连接杆螺纹连接。
19.通过采用上述技术方案,启动移动电机并驱动移动丝杠转动,移动丝杠驱动连接杆平移,从而移动支撑座,并调整支撑座和支撑架之间的距离。
20.可选的,所述窗口上侧壁开设有用于容纳玻璃板的容纳槽,所述玻璃板与所述容纳槽滑动连接,且所述容纳槽的槽壁上开设有安装槽,所述安装槽内设有用于移动玻璃板的驱动组件,所述驱动组件与所述控制器电连接,所述控制器电连接有第二压力传感器,所述第二压力传感器设置在所述座椅的上端面上。
21.通过采用上述技术方案,当工作人员坐在座椅上时,第二压力传感器检测到工作人员并将信号传递到控制器内,控制器则控制驱动组件移动玻璃板,使玻璃板自动打开并到达安全位置,当工作人员离开座椅后,第二压力传感器将信号传递到控制器并保持一段时间后,控制器驱动移动组件移动玻璃板,使玻璃板再次封闭窗口,从而提高实验的安全性。
22.可选的,所述驱动组件包括抵紧在玻璃板侧壁上的传动辊,所述传动辊的一端设有驱动电机,所述驱动电机与所述控制器电连接。
23.通过采用上述技术方案,控制器控制驱动电机启动,并驱动传动辊转动,传动辊通过摩擦力移动玻璃板。
24.可选的,所述托板下方设有调节组件,所述调节组件包括滑动连接在槽底的滑动块,所述托板与所述滑动块铰接,所述滑动块和所述凹槽的槽壁之间设有连接两者的缓冲弹簧。
25.通过采用上述技术方案,不同工作人员的肩宽不同,当小臂搭接在托板上后,可以通过移动小臂从而带动托板和移动块移动,由此调整托板的位置,使托板符合工作人员的肩宽,另外缓冲弹簧在滑动块运动后发生形变,使滑动块不易移动,从而提高滑动块移动的稳定性,进而保持小臂的稳定性。
26.综上所述,本技术包括以下至少一种有益技术效果:1.检测组件和升降组件能够检测工作人员与柜体之间的高度差异,从而自动调整座椅高度,进而提高工作人员和柜体之间的配合度,减少工作人员的疲劳度,提高工作效率;2.移动组件调整座椅和柜体之间距离,进一步提高工作人员和柜体的适配度;3.第二压力传感器和驱动组件自动检测工作人员的工作状态,并调整窗口的开闭状态,提高柜体内实验的安全性。
附图说明
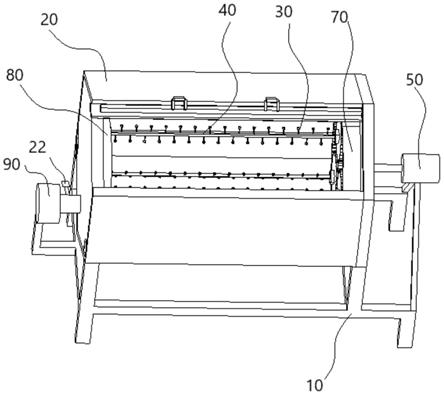
27.图1是本技术实施例1的整体结构示意图。
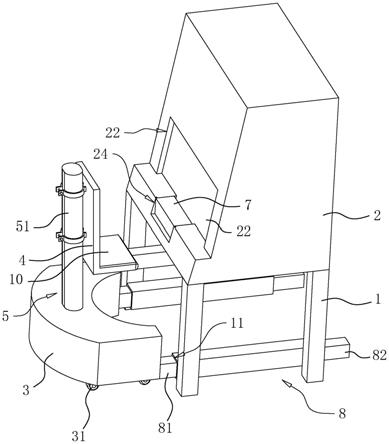
28.图2是实施例1中关于移动组件的结构示意图。
29.图3是实施例1中关于检测组件的结构示意图。
30.图4是实施例1中关于端盖的结构示意图。
31.图5是实施例1中关于升降组件的结构示意图。
32.图6是图2中a部的放大示意图。
33.图7是实施例1中关于驱动组件的结构示意图。
34.图8是本技术实施例2中关于调节组件的结构示意图。
35.附图标记说明:1、支撑架;11、滑动槽;2、柜体;21、窗口;22、玻璃板;23、容纳槽;24、凹槽;25、导向槽;26、卡槽;27、安装槽;28、调节组件;281、滑轨;282、滑动块;283、滑动杆;284、缓冲弹簧;3、支撑座;31、滚轮;4、座椅;5、升降组件;51、升降柱;52、升降丝杠;53、升降电机;6、检测组件;61、固定块;62、托板;63、第一压力传感器;64、角度传感器;65、支撑弹簧;7、端盖;71、导向杆;72、卡块;8、移动组件;81、连接杆;82、移动电机;83、移动丝杠;9、驱动组件;91、传动辊;92、驱动电机;93、防滑层;10、第二压力传感器。
具体实施方式
36.以下结合附图1-8对本技术作进一步详细说明。
37.实施例1本技术实施例1公开一种带有智能检测功能的生物安全柜。参照图1,生物安全柜包括支撑架1,支撑架1上安装有柜体2,柜体2的一侧开设有窗口21,窗口21内活动连接有用于密封的玻璃板22。
38.在柜体2的一侧设有朝向窗口21的座椅4,座椅4下方设有支撑座3,座椅4和支撑座3之间设有连接两者的升降组件5。支撑座3下端面的四角位置安装有滚轮31,支撑座3和支撑架1之间设有连接两者的移动组件8。
39.参照图1和图2,移动组件8包括两个相互平行的连接杆81,连接杆81的一端与支撑座3靠近支撑架1的一端固定连接,且两个连接杆81对应设置在支撑座3的两侧。支撑架1上开设有与连接杆81配合滑动槽11,连接杆81插接在滑动槽11内并且与滑动槽11滑动连接。支撑架1远离支撑座3的一端安装有与连接杆81对应的移动电机82,移动电机82电连接有控制器,移动电机82的输出轴固定连接有同轴的移动丝杠83,移动丝杠83与连接杆81平行设置,移动丝杠83穿入连接杆81内,且移动丝杠83与连接杆81螺纹连接。
40.启动移动电机82,移动电机82驱动移动丝杠83转动,连接杆81沿移动丝杠83的轴线平移,并带动支撑座3和座椅4平移,从而调整座椅4与柜体2之间的相对距离。
41.参照图1和图3,在柜体2上开设有凹槽24,凹槽24位于窗口21的下边框处。凹槽24内设置有检测组件6,检测组件6与控制器电连接,控制器同时与升降组件5电连接。
42.检测组件6包括两个固定块61,两个固定块61下端固定在凹槽24的槽底上,且两个固定块61之间的距离在正常人肩宽范围内。固定块61上端转动连接有托板62,托板62设置为能够承托人体小臂的弧形板,并且在托板62和固定块61转动处安装有角度传感器64,角度传感器64用于检测托板62和固定块61之间的相对角度。弧形板上端面的中间位置安装有第一压力传感器63,角度传感器64和第一压力传感器63均与控制器电连接。弧形板两端的下端面均固定连接有支撑弹簧65,支撑弹簧65远离托板62的一端固定连接在凹槽24的槽底上,在没有外力的作用下,支撑弹簧65使托板62保持水平的状态。
43.参照图1、图3和图4,为了保护并隐藏检测组件6,在凹槽24处设置有端盖7,凹槽24靠近座椅4一端的两个槽壁上均开设有竖直的导向槽25,两个导向槽25相对设置,端盖7靠近座椅4一端的一侧固定连接有沿竖直方向分布的两个导向杆71,两个导向杆71插接在一个导向槽25内,且端盖7的另一侧设置结构相同且与另一个导向槽25相配合的导向杆71。端盖7另一端固定有卡块72,凹槽24的槽壁上开设有与卡块72配合的卡槽26,且卡块72与卡槽26过盈配合。
44.挤压端盖7的两端,并向上提拉端盖7,使卡块72脱离卡槽26,并且在导向杆71和导向槽25配合的作用下向上移动,当位于上方的导向杆71脱离导向槽25时,端盖7能够朝向靠近座椅4的一侧转动,并再次向下移动端盖7,使端盖7卡接在柜体2上。
45.当工作人员坐在座椅4上时,打开端盖7,小臂搭接在托板62上,由于座椅4高度与工作人员身高不适合,工作人员的小臂会转动托板62,此时,第一压力传感器63检测到小臂的压力信号,角度传感器64检测到托板62发生转动的信号,且第一压力传感器63和角度传感器64将信号传递到控制器中,控制器则控制升降组件5调节座椅4的高度,使工作人员上升或下降,由此调整小臂相对窗口21边框的角度,当小臂带动托板62转动到适合的角度范围内时,控制器控制升降组件5停止运行;随后工作人员小臂脱离托板62,第一压力传感器63不再传递压力信号到控制器,此时角度传感器64传递转动信号至控制器后,控制器则不会控制升降组件5运行,即第一压力传感器63和角度传感器64同时传递信号到控制器时,控制器控制升降组件5运行,否则控制器控制升降组件5不运行。
46.参照图1和图5,升降组件5包括升降柱51,座椅4的靠背通过螺栓与升降柱51可拆卸连接。在支撑座3内部开设有空腔,升降柱51穿入空腔并且与支撑座3滑动连接。空腔内安装有升降电机53,升降电机53的输出轴固定连接有平行于升降柱51的升降丝杠52,升降丝杠52靠近升降电机53的一端与支撑座3转动连接,另一端插接在升降柱51内,且与升降柱51螺纹连接。
47.参照图2和图6,为了提高生物安全柜的安全性,在座椅4上安装有第二压力传感器10,同时在柜体2内设有用于驱动玻璃板22移动的驱动组件9,第二压力传感器10和驱动组件9均与控制器电连接。
48.当工作人员坐在座椅4上时,第二压力传感器10将检测到的压力信号传递到控制器内,控制器控制驱动组件9驱动玻璃板22到安全位置,从而打开窗口21;当工作人员离开座椅4并保持一段时间后,控制器根据第二压力传感器10传递的信号而控制驱动组件9驱动玻璃板22再次闭合封堵窗口21。
49.参照图6和图7,柜体2上开设有容纳槽23,容纳槽23开设在窗口21的上侧壁处,玻璃板22插接在容纳槽23内且通过容纳槽23与柜体2滑动连接。容纳槽23内部正对玻璃板22的两个槽壁上均开设有安装槽27,两个安装槽27相对设置且位于容纳槽23靠近窗口21的一端,驱动组件9设置在安装槽27内。
50.驱动组件9包括与安装槽27对应设置的传动辊91,传动辊91位于安装槽27内且与柜体2转动连接,两个传动辊91位于玻璃板22的两侧,传动辊91外侧设有一层防滑层93,防滑层93与玻璃板22的侧壁抵紧。其中一个安装槽27内安装有驱动电机92,驱动电机92的输出轴与所对应的传动辊91的端部固定连接,两个传动辊91上均固定连接有齿轮,两个传动辊91上的齿轮啮合传动。
51.控制器控制驱动电机92启动,驱动电机92驱动一个传动辊91转动,传动辊91通过齿轮驱动另一个传动辊91以相反的方向同步转动,从而驱动玻璃板22沿容纳槽23平移。
52.本技术实施例1的实施原理为:启动移动电机82,调整座椅4和柜体2之间的距离,工作人员坐到座椅4上,并打开端盖7,工作人员的小臂搭接在托板62上,控制器控制升降电机53启动,调节座椅4的高度,当工作人员小臂与窗口21下端面平齐后,座椅4停止移动,小臂脱离托板62并将端盖7盖合在凹槽24上;
当工作人员坐到座椅4上时,控制器控制驱动电机92启动,并驱动玻璃板22打开到安全位置,在工作人员脱离座椅4一段时间后,控制器再次控制驱动电机92启动,驱动玻璃板22下降直至封闭窗口21。
53.实施例2参照图8,与实施例1不同之处在于,凹槽24内设置有连接固定块61和柜体2的调节组件28,调节组件28包括固定在凹槽24的槽底上的滑轨281,滑轨281的两端分别抵接在凹槽24的两个相对的槽壁上。在滑轨281上滑动连接有两个滑动块282,滑动块282与固定块61一一对应,相对应的固定块61和滑动块282固定连接,同时支撑弹簧65一端与托板62固定连接,另一端与滑动块282固定连接。
54.调节组件28包括设置在滑轨281两侧的滑动杆283,滑动杆283平行于滑轨281,且与凹槽24的槽壁固定连接。滑动杆283穿过滑动块282,并且与滑动块282滑动连接。滑动杆283上套设有与滑动块282相匹配的缓冲弹簧284,缓冲弹簧284的一端与滑动块282固定连接,缓冲弹簧284的另一端与凹槽24的槽壁固定连接。
55.当工作人员的小臂搭接在托板62上后,根据工作人员的肩宽,可以调整两个滑动块282之间的距离,从而使托板62能够在正确的位置承托小臂,提高对小臂水平度检测的准确性。其中缓冲弹簧284起到阻碍滑动块282移动的作用,从而使滑动块282不易滑动,进而提高移动托板62时的稳定性。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。