1.本发明涉及水位监测领域,特别涉及一种水位监测装置及水位监测方法。
背景技术:
2.水位监测目前有水位监测站、雷达水位计、浮漂水位计等监测方式,监测站精度高但是建设成本太大,对建设地点、供电有较大要求;雷达水位计安装方便但只能安装在垂直水面的地方,无法实现坡道测量水位;浮漂水位计精度太低,受水流和深度限制。
技术实现要素:
3.本发明要解决的技术问题是为了克服现有技术中水位监测方式存在的各种缺陷,提供一种水位监测装置及水位监测方法。
4.本发明是通过下述技术方案来解决上述技术问题:
5.本发明提供了一种水位监测装置,包括测量设备、陀螺仪及处理设备;
6.所述测量设备用于扫描水位液面与一目标物的交接点并得到初始扫描面的点云图,并将所述初始扫描面的点云图传输至所述处理设备;
7.所述陀螺仪用于检测所述测量设备的当前倾角信息并传输至所述处理设备;
8.所述处理设备用于根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。
9.较佳地,所述初始扫描面的点云图为三维空间切面的极坐标系点云图,所述处理设备用于将所述极坐标系点云图转换为初始笛卡尔坐标系点云图,并根据所述当前倾角信息得到所述真实扫描面的真实笛卡尔坐标系点云图。
10.较佳地,所述处理设备包括:
11.点处理单元,用于获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;
12.转换单元,用于将稳定的极坐标系点云图转换为卡尔坐标系点云图;
13.统计单元,用于取所有点y值的众数,并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点,计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ;
14.比较单元,用于以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离的稳定度,稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔;若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值;若若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔。
[0015]
较佳地,所述处理设备还包括:
[0016]
高度值处理单元,用于获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;
[0017]
所述高度值处理单元还用于统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。
[0018]
较佳地,所述水位监测装置还包括外壳,所述测量设备、陀螺仪及处理设备均设置于所述外壳中;
[0019]
所述外壳具有开口朝下的测量窗口,所述测量设备设置于所述测量窗口中,所述测量窗口处具有凹陷的导流槽。
[0020]
较佳地,所述外壳为半球型,和/或,所述外壳上设有水泡水平仪。
[0021]
较佳地,所述水位监测装置还包括设于所述外壳内部的温控开关及散热风扇,所述温控开关用于在检测到温度高于设定值后启动所述散热风扇。
[0022]
较佳地,所述水位监测装置还包括稳压电源和/或通讯模块,和/或,所述测量设备包括激光雷达。
[0023]
本发明还提供了一种水位监测方法,利用上述的水位监测装置实现,所述水位监测方法包括:
[0024]
通过测量设备扫描水位液面与一目标物的交接点并得到初始扫描面的点云图;
[0025]
检测测量设备的当前倾角信息;
[0026]
根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。
[0027]
较佳地,所述水位监测方法具体包括:
[0028]
获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;
[0029]
将稳定的极坐标系点云图转换为卡尔坐标系点云图;
[0030]
取所有点y值的众数,并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点,计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ;
[0031]
以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离的稳定度,稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔;若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值;若若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔;
[0032]
获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;
[0033]
统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。
[0034]
本发明的积极进步效果在于:本发明采用激光雷达作为测量设备,测量精度高,激光雷达的有效探测范围为100米,角分辨率为0.02度。本发明低功耗,正常工作时的功率不足20瓦。本发明成本低,相对于建设水位站,本发明仅需一个立杆和电源即可工作。本发明安装便捷,可固定在多种支架上,且设备外壳带有水泡水平仪。本发明安装位置易于选择,可安装在水岸边、水岸中、坡道上、墙面上等地方,可对水坝、斜坡、立柱、桥墩、墙面等目标物进行探测。本发明的装置抗风,具有半球型外壳,符合流体力学,降低大风对装置的晃动影响。本发明防水,具有ip65防水等级,设备外壳的窗口具有导流槽,能有效防止安装后雨水浸入设备内部。
附图说明
[0035]
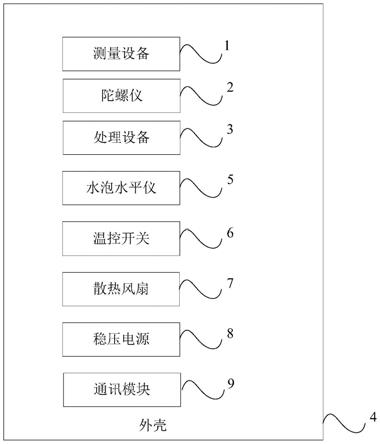
图1为本发明实施例1的水位监测装置的模块示意图。
[0036]
图2为本发明实施例1的水位监测装置的处理设备的模块示意图。
[0037]
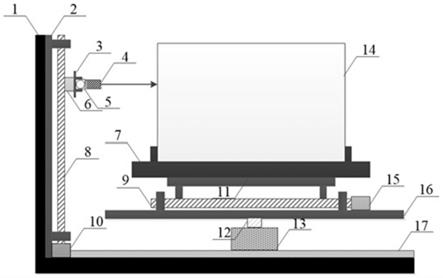
图3为本发明实施例1的水位监测装置的主视图。
[0038]
图4为本发明实施例1的水位监测装置的左视图。
[0039]
图5为本发明实施例1的水位监测装置的俯视图。
[0040]
图6为本发明实施例1的水位监测装置的立体图。
[0041]
图7为本发明实施例1中的点云示意图。
[0042]
图8为本发明实施例1中的二维坐标点示意图。
[0043]
图9为本发明实施例1中的角度区间示意图。
[0044]
图10为本发明实施例2的水位监测方法的流程图。
[0045]
图11为本发明实施例2的水位监测方法的具体流程图。
具体实施方式
[0046]
下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
[0047]
实施例1
[0048]
本实施例提供了一种水位监测装置,如图1所示,包括测量设备1、陀螺仪2及处理设备3;
[0049]
所述测量设备1用于扫描水位液面与一目标物的交接点并得到初始扫描面的点云图,并将所述初始扫描面的点云图传输至所述处理设备3;其中,所述测量设备1具体可扫描页面与地面、坝体、立柱等固体的交接点,并得到交接点所在固定平面的点云图。
[0050]
所述陀螺仪2用于检测所述测量设备1的当前倾角信息并传输至所述处理设备3,所述陀螺仪2具体可以返回偏航角、俯仰角、翻滚角等信息,根据这三个角度可以确定所述测量设备1目前所处的三维姿态。
[0051]
所述处理设备3用于根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。
[0052]
具体地,所述初始扫描面的点云图为三维空间切面(即所述测量设备1的而为扫描
面)的极坐标系点云图,其中,极坐标系的极点具体可以为所述测量设备1,极轴则可以根据所述测量设备1的安装方式进行自定义,点云图由有限个点构成,点的个数由测量设备1的角分辨率、测量设备1所处外壳窗口的大小以及被测目标物是否有回波来控制。所述处理设备3用于将所述极坐标系点云图转换为初始笛卡尔坐标系点云图,其中,所述笛卡尔坐标系的原点具体可以为所述测量设备1,x轴为水平面,y轴为垂直水平面,例如测量设备返回极坐标系点(10cm,0.3
°
),则可转化为笛卡尔坐标系(sin0.3
°
*10cm,cos0.3
°
*10cm),并根据所述当前倾角信息得到所述真实扫描面的真实笛卡尔坐标系点云图,具体可以根据当前倾角信息确定出极坐标系的极轴,再通过倾角信息将极坐标系的极轴修正为位于水平面,即可得到真实扫描面。
[0053]
在本发明的具体实施过程中,如图2所示,所述处理设备3可以包括:
[0054]
点处理单元31,用于获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;例如,在角度0.3
°
的测量点下,返回的数据为[100,101,102,103,99,98,97],计算这些点的标准差,若小于预设阈值(例如预设阈值为3),则该些点取值稳定,否则该些点取值不稳定,舍弃不用。
[0055]
转换单元32,将稳定的极坐标系点云图转换为卡尔坐标系点云图;
[0056]
统计单元33,用于将点云图滤波平滑后得到点云示意图,取所有点y值(对于所述测量设备1扫描出的点,y值具体指的是该点到所述测量设备1的垂直距离)的众数(如图7所示,图中4即为众数,具体在图7中,横轴代表x,即测量设备到该点的水平距离;纵轴代表y,即测量设备到该点的垂直距离),并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点(其示意图如图8所示,其中示出了出现4的频率,具体在图8中,横轴代表测量设备在图7中的x,纵轴代表对于每一个x的具体取值y=4出现的次数),并得到这些二维坐标点的连线,然后计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ(该初始角度具体指的就是极坐标系中的极角);
[0057]
比较单元33,用于以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离(该距离即为极径)的稳定度(角度区间具体如图9所示),稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔,n可以为人工设定值,此处具体可以先计算θ角累计的标准差sθ,再以此方式计算出其他角度的标准差sθ n,最后计算在区间内[θ,θ n]各个角度标准差的标准差s(sθ,
…
,sθ n);若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值(对于所述测量设备1扫描出的点,具体指的是该点到所述测量设备1的垂直距离);若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔。
[0058]
具体如下表1所示,其示出了各角度下各帧距离值的标准差以及两个角度区间的标准差(即稳定度),当然,表1只是一个示例,其对本发明的方案不作具体限定。在表1中,测量设备扫描一周得到的数据为一帧,当然,一帧所对应的的时间段也可以不限于一周,具体
可以根据实际需要进行其他设置,距离值则表示测量设备到在此角度上的物体的直线距离,该距离是由测量设备提供出来的。
[0059]
表1
[0060][0061]
优选地,所述处理设备3还包括:
[0062]
高度值处理单元34,用于获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;
[0063]
所述高度值处理单元还用于统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。
[0064]
如图1以及图3-6所示,所述水位监测装置还包括外壳4,所述测量设备1、陀螺仪2及处理设备3均设置于所述外壳4中;
[0065]
所述外壳4具有开口朝下的测量窗口41,所述测量设备1设置于所述测量窗口41中,所述测量窗口41处具有凹陷的导流槽42。所述外壳4为半球型,所述外壳4上设有水泡水平仪5,水泡水平仪5可以辅助安装人员对整个装置进行水平校准,防止过度倾斜。
[0066]
在本发明中,测量设备1与处理设备3均安装在外壳4内,整个装置可以立式安装,半球型外壳能有效抗风冲击。外壳4为测量设备1提供的窗口朝下,能有效的防止液体从上
方侵入外壳4内部。外壳4窗口上具有凹陷的导流槽42,能有效防止表面液体顺着窗口缝隙浸入设备内部。在实际使用时,整体装置安装在水面附近,需要使得测量设备1能同时检测到水面与检测目标物(斜坡、水坝、立柱等)。
[0067]
所述水位监测装置还包括设于所述外壳4内部的温控开关6及散热风扇7,所述温控开关6用于在检测到温度高于设定值后启动所述散热风扇7,为外壳4内部进行散热。另外,所述水位监测装置还包括稳压电源8和通讯模块9,稳压电源8将外界供电输出成平稳的直流电,能更好的适配电池或光伏、风力发电提供的不稳定电源。通讯模块9可以为处理设备3向外界发送实时水位数据,具体可以以固定周期来定期向外输出数据到服务器或终端设备,当然,服务器或终端设备也可以主动获取数据。
[0068]
其中,所述测量设备1优选可以为激光雷达。
[0069]
实施例2
[0070]
本实施例提供了一种水位监测方法,其利用实施例1所述的水位监测装置实现,如图10所示,所述水位监测方法包括:
[0071]
s1、通过测量设备扫描水位液面与一目标物的交接点并得到初始扫描面的点云图;
[0072]
s2、检测测量设备的当前倾角信息;
[0073]
s3、根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。
[0074]
具体地,如图11所示,所述水位监测方法具体可包括:
[0075]
s11、获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;
[0076]
s12、将稳定的极坐标系点云图转换为卡尔坐标系点云图;
[0077]
s13、取所有点y值的众数,并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点,计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ;
[0078]
s14、以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离的稳定度,稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔;若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值;若若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔;
[0079]
s15、获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;
[0080]
s16、统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。
[0081]
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅
是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。