技术特征:
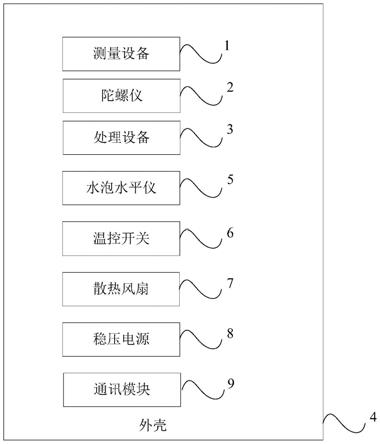
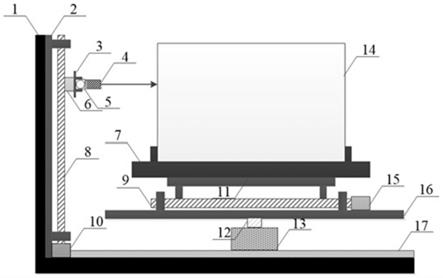
1.一种水位监测装置,其特征在于,包括测量设备、陀螺仪及处理设备;所述测量设备用于扫描水位液面与一目标物的交接点并得到初始扫描面的点云图,并将所述初始扫描面的点云图传输至所述处理设备;所述陀螺仪用于检测所述测量设备的当前倾角信息并传输至所述处理设备;所述处理设备用于根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。2.如权利要求1所述的水位监测装置,其特征在于,所述初始扫描面的点云图为三维空间切面的极坐标系点云图,所述处理设备用于将所述极坐标系点云图转换为初始笛卡尔坐标系点云图,并根据所述当前倾角信息得到所述真实扫描面的真实笛卡尔坐标系点云图。3.如权利要求2所述的水位监测装置,其特征在于,所述处理设备包括:点处理单元,用于获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;转换单元,用于将稳定的极坐标系点云图转换为卡尔坐标系点云图;统计单元,用于取所有点y值的众数,并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点,计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ;比较单元,用于以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离的稳定度,稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔;若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值;若若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔。4.如权利要求3所述的水位监测装置,其特征在于,所述处理设备还包括:高度值处理单元,用于获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;所述高度值处理单元还用于统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。5.如权利要求1所述的水位监测装置,其特征在于,所述水位监测装置还包括外壳,所述测量设备、陀螺仪及处理设备均设置于所述外壳中;所述外壳具有开口朝下的测量窗口,所述测量设备设置于所述测量窗口中,所述测量窗口处具有凹陷的导流槽。6.如权利要求5所述的水位监测装置,其特征在于,所述外壳为半球型,和/或,所述外壳上设有水泡水平仪。7.如权利要求5所述的水位监测装置,其特征在于,所述水位监测装置还包括设于所述外壳内部的温控开关及散热风扇,所述温控开关用于在检测到温度高于设定值后启动所述散热风扇。
8.如权利要求1所述的水位监测装置,其特征在于,所述水位监测装置还包括稳压电源和/或通讯模块,和/或,所述测量设备包括激光雷达。9.一种水位监测方法,其特征在于,利用如权利要求1-8中任意一项所述的水位监测装置实现,所述水位监测方法包括:通过测量设备扫描水位液面与一目标物的交接点并得到初始扫描面的点云图;检测测量设备的当前倾角信息;根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。10.如权利要求9所述的水位监测方法,其特征在于,所述水位监测方法具体包括:获取一时间段内的极坐标系点云图,并剔除不稳定的测量点后生成稳定的极坐标系点云图,其中,对于同一极角下的多个测量点,若所述多个测量点的极径的标准差超过预设阈值,则所述多个测量点均不稳定,否则所述多个测量点均稳定;将稳定的极坐标系点云图转换为卡尔坐标系点云图;取所有点y值的众数,并统计各个角度下出现该众数的频率,并得到以角度为横轴、以频率为纵轴的二维坐标点,计算出斜率绝对值最大且横轴坐标值最大时对应的初始角度θ;以所述初始角度θ为起点,对比θ到θ n的第一角度区间和θ到θ-n的第二角度区间下距离的稳定度,稳定度为区间内各个角度下距离的标准差之间的标准差,其中n为第一预设角度间隔;若[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,则确定此时的θ角的稳定性最好,并获取与此时的θ角对应测量点的y值作为空高高度值;若若[θ-n,θ]的第一角度区间下的稳定度小于[θ,θ n]的第二角度区间下的稳定度,则将θ k赋值为θ,并重新进行所述稳定度的比较,直至[θ-n,θ]的第一角度区间下的稳定度大于[θ,θ n]的第二角度区间下的稳定度,其中k为第二预设角度间隔;获取与每一次扫描相对应的空高高度值,并按照第一时间段保存所有空高高度值,得到第一窗口数据,并在所述第一窗口数据中剔除异常数据后获取剩余数据的平均值作为所述第一时间段内的第一输出数据;统计第二时间段内包含的多个第一时间段的第一输出数据,并获取多个第一输出数据的平均值作为第二输出数据。
技术总结
本发明公开了一种水位监测装置及水位监测方法,水位监测装置包括测量设备、陀螺仪及处理设备;所述测量设备用于扫描水位液面与一目标物的交接点并得到初始扫描面的点云图,并将所述初始扫描面的点云图传输至所述处理设备;所述陀螺仪用于检测所述测量设备的当前倾角信息并传输至所述处理设备;所述处理设备用于根据所述当前倾角信息获取与所述初始扫描面的点云图相对应的真实扫描面的点云图,并根据所述真实扫描面的点云图获取水位液面的高度。本发明采用激光雷达作为测量设备,测量精度高。度高。度高。
技术研发人员:梁树胜 沈严 姚华 王涛
受保护的技术使用者:上海止水智慧科技有限公司
技术研发日:2022.01.05
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。