1.本发明涉及挂轨机器人技术领域,尤其涉及一种挂轨机器人检修举升装置。
背景技术:
2.挂轨机器人是一种可移动的巡检机器人,适用于电缆、仓库、车间等多种场合。为增大挂轨机器人的巡检范围,普遍将其设置在距离地面数米的高度处,当需要检查或者维修挂轨机器人时,需要人工攀爬到挂轨机器人的设置处,此过程操作不便且具有一定的危险性。
技术实现要素:
3.(一)要解决的技术问题
4.鉴于现有技术的上述缺点、不足,本发明提供一种挂轨机器人检修举升装置,其解决了挂轨机器人设置位置较高不便于维修检查的技术问题。
5.(二)技术方案
6.为了达到上述目的,本发明采用的主要技术方案包括:
7.第一方面,本发明实施例提供一种挂轨机器人检修举升装置,挂轨机器人包括两个机器人夹持爪,两个机器人夹持爪相对设置,且滑动设置在横向导轨上;
8.挂轨机器人检修举升装置包括举升机构和纵向导轨,举升机构滑动设置在纵向导轨上;
9.举升机构包括举升底座、两个举升夹持爪和顶撑件;
10.两个举升夹持爪相对设置,且能够在夹持状态和松开状态之间切换地设置在举升底座的顶部;
11.两个举升夹持爪处于夹持状态时,两个举升夹持爪夹持挂轨机器人;
12.顶撑件能够上下移动地设置在举升底座上:
13.当两个举升夹持爪夹持挂轨机器人时:
14.顶撑件上移,以驱动两个机器人夹持爪张开,挂轨机器人脱离横向导轨;或者
15.顶撑件下移,以驱动两个机器人夹持爪闭合,挂轨机器人挂设在横向导轨上。
16.根据本发明,挂轨机器人还包括机器人底座和牵引件;两个机器人夹持爪的下端均铰接在机器人底座的顶部;两个机器人夹持爪的下部分别相对延伸形成连接臂,连接臂上分别沿其延伸方向设置滑槽;
17.牵引件竖直设置,且能够上下移动地设置在机器人底座上;
18.牵引件的上部设置牵引滑块,牵引滑块滑动设置在两个机器人夹持爪的滑槽内。
19.根据本发明,牵引件的底部沿其宽度方向向外延伸形成牵引限位部,牵引件的外周套设牵引弹性件;
20.牵引件能够上下移动地设置在机器人底座的空腔内,空腔上下贯通;
21.机器人底座的上部向空腔的方向延伸形成环形的上限位部,下部向空腔的方向延
伸形成环形的下限位部;
22.牵引弹性件的一端抵靠牵引限位部,另一端抵靠在上限位部上。
23.根据本发明,顶撑件在上移操作中进入机器人底座的空腔内并抵靠牵引限位部,以带动牵引件同步上移。
24.根据本发明,举升底座的顶部设置沿横向延伸的两个底座导轨,两个底座导轨间隔设置,两个举升夹持爪分别滑动设置在两个底座导轨上。
25.根据本发明,举升机构还包括举升滑块和锁紧组件;
26.举升机构通过举升滑块滑动设置在纵向导轨上;
27.举升滑块包括第一举升滑块和第二举升滑块,第一举升滑块和第二举升滑块沿纵向导轨的宽度方向相对设置,第一举升滑块固定在举升底座上,第二举升滑块能够相对纵向导轨的宽度方向移动地设置在举升底座上;
28.锁紧组件能够驱动第二举升滑块靠近或远离第一举升滑块;
29.第二举升滑块抵靠第一举升滑块时,举升滑块锁紧在纵向导轨上;
30.第二举升滑块远离第一举升滑块时,举升滑块能够相对纵向导轨滑动。
31.根据本发明,锁紧组件包括锁紧件和锁紧驱动件;
32.锁紧件沿纵向导轨的宽度方向贯穿第一举升滑块和第二举升滑块,且锁紧件固定在第二举升滑块上;
33.锁紧驱动件的驱动端和锁紧件固定连接,且锁紧驱动件能够驱动锁紧件移动,以使第二举升滑块抵靠或远离第一举升滑块。
34.根据本发明,两个举升夹持爪与挂轨机器人的抵接面均分别设置夹持传感器。
35.根据本发明,举升底座上设置有距离传感器。
36.根据本发明,举升底座的顶部设置有抵靠传感器。
37.(三)有益效果
38.本发明的有益效果是:本发明的挂轨机器人检修举升装置,具体设置为挂轨机器人检修举升装置包括举升机构和纵向导轨,举升机构沿上下方向滑动设置在纵向导轨上,以上移至挂轨机器人的位置处或者下移至便于检修的位置处。举升机构包括举升底座、两个举升夹持爪和顶撑件。两个举升夹持爪相对设置,且可在松开状态和夹持状态之间切换地设置在底座的顶部。两个举升夹持爪处于夹持状态时,两个举升夹持爪夹持挂轨机器人。顶撑件可上下移动地设置在举升底座上,两个举升夹持爪夹持挂轨机器人时,顶撑件上移,能够驱动两个机器人夹持爪张开。两个机器人夹持爪张开时,挂轨机器人脱离横向导轨。顶撑件下移,两个机器人夹持爪闭合,挂轨机器人挂设在横向导轨上,两个机器人夹持爪闭合时,挂轨机器人挂设在横向导轨上。
39.通过上述设置,以使挂轨机器人检修举升装置能够自动将挂轨机器人脱离横向导轨并下移至距地面一定高度处,以供检查维修,并在检查维修之后将挂轨机器人送回并挂接在横向导轨上,以便于对挂轨机器人检查维修。
附图说明
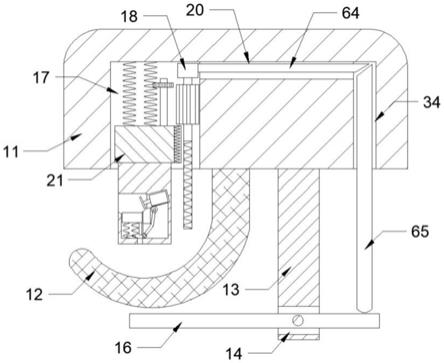
40.图1为本发明的挂轨机器人检修举升装置的实施例的主视图;
41.图2为图1中的挂轨机器人的右视图;
42.图3为图2中的机器人夹持爪闭合时的剖视图;
43.图4为图2中的机器人夹持爪张开时的剖视图;
44.图5为图1中的举升机构的主视剖视图;
45.图6为图5的俯视图。
46.【附图标记说明】
47.11:机器人底座;111:空腔;112:上限位部;113:下限位部;12:机器人夹持爪;121:连接臂;1211:滑槽;13:横向导轨;14:夹持爪弹性件;15:牵引件;151:牵引滑块;152:牵引限位部;16:牵引弹性件;
48.21:举升底座;211:凹槽;212:底座导轨;22:举升夹持爪;23:顶撑件;24:顶撑驱动件;25:举升滑块;251:第一举升滑块;252:第二举升滑块;26:锁紧组件;261:锁紧件;262:锁紧驱动件;27:纵向导轨。
具体实施方式
49.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。其中,本文所提及的“上”、“下”等方位名词以图1的定向为参照。
50.参照图1所示,本发明实施例提出的挂轨机器人检修举升装置,用于将挂轨机器人下移至距地面一定高度处,以便于检查或维修,并在检查或维修之后将其上移送回至横向导轨13处。
51.参照图1-4所示,挂轨机器人包括机器人底座11和两个机器人夹持爪12。机器人底座11上设置摄像机。两个机器人夹持爪12相对设置,且位于机器人底座11的顶部,并滑动设置在横向导轨13上,以带动挂轨机器人上的摄像机沿横向导轨13巡视。
52.参照图3-4所示,两个机器人夹持爪12能够张开或闭合:两个机器人夹持爪12张开时,挂轨机器人脱离横向导轨13;两个机器人夹持爪12闭合时,挂轨机器人挂设在横向导轨13上。
53.驱动两个机器人夹持爪12张开或闭合的具体结构为:两个机器人夹持爪12的下端均铰接在机器人底座11上,以相对机器人底座11转动至张开或闭合状态。两个机器人夹持爪12的下部分别相对延伸形成连接臂121,连接臂121上沿其延伸方向设置滑槽1211。
54.挂轨机器人还包括夹持爪弹性件14、牵引件15和牵引弹性件16。夹持爪弹性件14的两端分别固定在两个机器人夹持爪12的下端。牵引件15竖直设置,且能够上下移动地设置在机器人底座11上。牵引件15的上部设置牵引滑块151,牵引滑块151滑动设置在两个机器人夹持爪12的滑槽1211内。牵引件15上移时,牵引滑块151沿两个机器人夹持爪12的滑槽1211滑动,并带动两个机器人夹持爪12张开。牵引件15的底部沿其宽度方向向外延伸形成牵引限位部152。牵引件15的外周套设牵引弹性件16。
55.牵引件15能够上下移动地设置在机器人底座11的空腔111内,机器人底座11的空腔111上下贯通,所述空腔111用于引导牵引件15沿上下方向移动,以提高本装置使用时的稳定性。机器人底座11的上部向空腔111的方向延伸形成环形的上限位部112,下部向空腔111的方向延伸形成环形的下限位部113。上限位部112和下限位部113分别用于限定牵引限位部152上下移动的位置,进而限定牵引件15上下移动的位置,以提高本装置使用时的稳定性。套设在牵引件15上的牵引弹性件16,其一端抵靠牵引限位部152,另一端抵靠在上限位
部112上。
56.具体地,驱动两个机器人夹持爪12张开或闭合的原理如下:
57.初始位置时,牵引件15的牵引限位部152抵靠在机器人底座11的下限位部113上,两个机器人夹持爪12处于闭合状态。通过外力驱动牵引件15上移时,推动牵引弹性件16压缩,并带动牵引滑块151沿两个机器人夹持爪12的滑槽1211滑动,以带动两个机器人夹持爪12绕其下端转动,两个机器人夹持爪12张开,此时,夹持爪弹性件14收缩。当作用在牵引件15上的外力消失时,夹持爪弹性件14和牵引弹性件16回复,夹持爪弹性件14带动两个机器人夹持爪12反向转动,直至两个机器人夹持爪12闭合,同时牵引弹性件16带动牵引件15下移,并回复至初始位置。
58.照图1、5-6所示,进一步,挂轨机器人检修举升装置包括举升机构和纵向导轨27。举升机构滑动设置在纵向导轨27上,举升机构用于将挂轨机器人脱离横向导轨13并下移至距地面一定高度处,以供检查维修,并在检查维修之后将挂轨机器人送回并挂接在横向导轨13上。
59.举升机构包括顶撑件23、举升底座21和两个举升夹持爪22。顶撑件23可上下移动地设置在举升底座21上,顶撑件23用于驱动牵引件15向上移动,进而驱动两个机器人夹持爪12张开。两个举升夹持爪22相对设置,且可在夹持状态和松开状态之间切换地设置在举升底座21的顶部。两个举升夹持爪22处于夹持状态时,用于夹持挂轨机器人,以提高举升机构运送挂轨机器人时的稳定性。
60.当两个举升夹持爪22夹持挂轨机器人时:顶撑件23上移并进入机器人底座11的空腔111后抵靠在牵引件15的底部,之后,顶撑件23带动牵引件15同步上移,以带动两个机器人夹持爪12张开,夹持爪弹性件14压缩;顶撑件23下移远离牵引件15时,夹持爪弹性件14和牵引弹性件16回复并带动两个机器人夹持爪12闭合。
61.具体地,举升底座21上设置纵向延伸的凹槽211,凹槽211用于容纳顶撑件23,顶撑件23通过顶撑驱动件24驱动其上下移动。顶撑驱动件24优选为液压缸。
62.举升底座21上还设置距离传感器,用于检测举升机构与地面间的距离。
63.举升底座21的顶部设置抵靠传感器,用于检测举升底座21和挂轨机器人的机器人底座11是否抵靠。抵靠传感器为压力传感器。
64.举升底座21的顶部设置沿横向延伸的两个底座导轨212,两个底座导轨212间隔设置,两个举升夹持爪22分别滑动设置在两个底座导轨212上,以使两个举升夹持爪22的间距增大或减小,进而使两个举升夹持爪22在夹持状态和松开状态之间切换。
65.具体地,两个举升夹持爪22与挂轨机器人的抵接面均分别设置夹持传感器,夹持传感器用于监测两个举升夹持爪22是否夹持在挂轨机器人上。夹持传感器为压力传感器。
66.进一步,举升机构还包括举升滑块25和锁紧组件26。举升机构通过举升滑块25滑动设置在纵向导轨27上。锁紧组件26用于在举升机构夹持挂轨机器人的过程中或者在检查维修挂轨机器人的过程中,将举升滑块25锁紧在纵向导轨27上,进而使举升机构的位置固定,以提高举升机构的使用可靠性。
67.具体地,举升滑块25包括第一举升滑块251和第二举升滑块252,第一举升滑块251和第二举升滑块252沿纵向导轨27的宽度方向相对设置,第一举升滑块251固定在举升底座21上,第二举升滑块252能够相对纵向导轨27的宽度方向移动地设置在举升底座21上。锁紧
组件26能够驱动第二举升滑块252靠近或远离第一举升滑块251:当第二举升滑块252抵靠第一举升滑块251时,举升滑块25锁紧在纵向导轨27上;当第二举升滑块252远离第一举升滑块251时,举升滑块25能够相对纵向导轨27滑动。
68.具体地,锁紧组件26包括锁紧件261和锁紧驱动件262。锁紧件261沿纵向导轨27的宽度方向贯穿第一举升滑块251和第二举升滑块252,且锁紧件261固定在第二举升滑块252上。锁紧驱动件262的驱动端和锁紧件261靠近第二举升滑块252的一端固定连接,且锁紧驱动件262能够驱动锁紧件261移动,以使第二举升滑块252抵靠或远离第一举升滑块251,进而使举升机构锁紧或解锁在纵向导轨27上。锁紧驱动件262优选为液压缸。
69.参照图1-6所示,进一步,本挂轨机器人检修举升装置的使用原理为:
70.初始位置时,举升机构位于距离地面一定高度处。当需要对挂轨机器人进行检查或维修时,举升机构沿纵向导轨27上移,并在上移的过程中,两个举升夹持爪22的间距增大至张开状态,至举升底座21上的抵靠传感器检测到举升底座21抵靠机器人底座11上时,锁紧组件26将举升机构锁紧在纵向导轨27上。之后,两个举升夹持爪22的间距缩小至闭合状态,以夹持挂轨机器人。位于两个举升夹持爪22上的夹持传感器监测到两个举升夹持爪22夹持在挂轨机器人上后,顶撑件23上移至抵靠在牵引件15的底部,之后,顶撑件23带动牵引件15同步上移,以带动两个机器人夹持爪12张开,并脱离横向导轨13。随后,锁紧组件26将举升机构解锁。在距离传感器的监测下,举升机构带动挂轨机器人沿纵向导轨27下移至距离地面一定高度处,锁紧组件26再次将举升机构锁紧在纵向导轨27上,以供检查维修。
71.当检查维修完成后,锁紧组件26将举升机构解锁,举升机构带动挂轨机器人沿纵向导轨27上移至横向导轨13的位置处时,锁紧组件26再次将举升机构锁紧在纵向导轨27上,顶撑件23下移,两个机器人夹持爪12闭合,并挂接在横向导轨13上。随后,两个举升夹持爪22的间距增大至张开状态,以使挂轨机器人解锁。在距离传感器的监测下,举升机构沿纵向导轨27下移至距离地面一定高度处。
72.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。