技术特征:
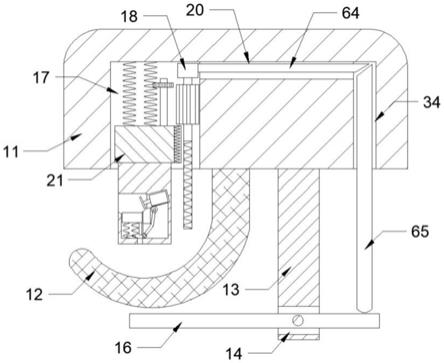
1.一种挂轨机器人检修举升装置,其特征在于,挂轨机器人包括两个机器人夹持爪(12),两个所述机器人夹持爪(12)相对设置,且滑动设置在横向导轨(13)上;所述挂轨机器人检修举升装置包括举升机构和纵向导轨(27),所述举升机构滑动设置在所述纵向导轨(27)上;所述举升机构包括举升底座(21)、两个举升夹持爪(22)和顶撑件(23);两个所述举升夹持爪(22)相对设置,且能够在夹持状态和松开状态之间切换地设置在所述举升底座(21)的顶部;两个所述举升夹持爪(22)处于夹持状态时,两个所述举升夹持爪(22)夹持所述挂轨机器人;所述顶撑件(23)能够上下移动地设置在所述举升底座(21)上:当两个所述举升夹持爪(22)夹持所述挂轨机器人时:所述顶撑件(23)上移,以驱动两个所述机器人夹持爪(12)张开,所述挂轨机器人脱离所述横向导轨(13);或者所述顶撑件(23)下移,以驱动两个所述机器人夹持爪(12)闭合,所述挂轨机器人挂设在所述横向导轨(13)上。2.如权利要求1所述的挂轨机器人检修举升装置,其特征在于,所述挂轨机器人还包括机器人底座(11)和牵引件(15);两个所述机器人夹持爪(12)的下端均铰接在所述机器人底座(11)的顶部;两个所述机器人夹持爪(12)的下部分别相对延伸形成连接臂(121),所述连接臂(121)上分别沿其延伸方向设置滑槽(1211);所述牵引件(15)竖直设置,且能够上下移动地设置在所述机器人底座(11)上;所述牵引件(15)的上部设置牵引滑块(151),所述牵引滑块(151)滑动设置在两个所述机器人夹持爪(12)的所述滑槽(1211)内。3.如权利要求2所述的挂轨机器人检修举升装置,其特征在于:所述牵引件(15)的底部沿其宽度方向向外延伸形成牵引限位部(152),所述牵引件(15)的外周套设牵引弹性件(16);所述牵引件(15)能够上下移动地设置在所述机器人底座(11)的空腔(111)内,所述空腔(111)上下贯通;所述机器人底座(11)的上部向所述空腔(111)的方向延伸形成环形的上限位部(112),下部向所述空腔(111)的方向延伸形成环形的下限位部(113);所述牵引弹性件(16)的一端抵靠所述牵引限位部(152),另一端抵靠在所述上限位部(112)上。4.如权利要求3所述的挂轨机器人检修举升装置,其特征在于:所述顶撑件(23)在上移操作中进入所述机器人底座(11)的所述空腔(111)内并抵靠所述牵引限位部(152),以带动所述牵引件(15)同步上移。5.如权利要求1所述的挂轨机器人检修举升装置,其特征在于,所述举升底座(21)的顶部设置沿横向延伸的两个底座导轨(212),两个所述底座导轨(212)间隔设置,两个所述举升夹持爪(22)分别滑动设置在两个所述底座导轨(212)上。6.如权利要求1所述的挂轨机器人检修举升装置,其特征在于,所述举升机构还包括举升滑块(25)和锁紧组件(26);
所述举升机构通过所述举升滑块(25)滑动设置在所述纵向导轨(27)上;所述举升滑块(25)包括第一举升滑块(251)和第二举升滑块(252),所述第一举升滑块(251)和所述第二举升滑块(252)沿所述纵向导轨(27)的宽度方向相对设置,所述第一举升滑块(251)固定在所述举升底座(21)上,所述第二举升滑块(252)能够相对所述纵向导轨(27)的宽度方向移动地设置在所述举升底座(21)上;所述锁紧组件(26)能够驱动所述第二举升滑块(252)靠近或远离所述第一举升滑块(251);所述第二举升滑块(252)抵靠所述第一举升滑块(251)时,所述举升滑块(25)锁紧在所述纵向导轨(27)上;所述第二举升滑块(252)远离所述第一举升滑块(251)时,所述举升滑块(25)能够相对所述纵向导轨(27)滑动。7.如权利要求6所述的挂轨机器人检修举升装置,其特征在于,所述锁紧组件(26)包括锁紧件(261)和锁紧驱动件(262);所述锁紧件(261)沿所述纵向导轨(27)的宽度方向贯穿所述第一举升滑块(251)和所述第二举升滑块(252),且所述锁紧件(261)固定在所述第二举升滑块(252)上;所述锁紧驱动件(262)的驱动端和所述锁紧件(261)固定连接,且所述锁紧驱动件(262)能够驱动所述锁紧件(261)移动,以使所述第二举升滑块(252)抵靠或远离所述第一举升滑块(251)。8.如权利要求1所述的挂轨机器人检修举升装置,其特征在于,两个所述举升夹持爪(22)与所述挂轨机器人的抵接面均分别设置夹持传感器。9.如权利要求1所述的挂轨机器人检修举升装置,其特征在于,所述举升底座(21)上设置有距离传感器。10.如权利要求9所述的挂轨机器人检修举升装置,其特征在于,所述举升底座(21)的顶部设置有抵靠传感器。
技术总结
本发明涉及一种挂轨机器人检修举升装置,挂轨机器人包括两个机器人夹持爪,滑动设置在横向导轨上。挂轨机器人检修举升装置包括举升机构和纵向导轨。举升机构包括举升底座、两个举升夹持爪和顶撑件。两个举升夹持爪相对设置。两个举升夹持爪处于夹持状态时,两个举升夹持爪夹持挂轨机器人。当两个举升夹持爪夹持挂轨机器人时:顶撑件上移,以驱动两个机器人夹持爪张开,挂轨机器人脱离横向导轨。或者顶撑件下移,两个机器人夹持爪闭合,挂轨机器人挂设在横向导轨上。其有益效果是,挂轨机器人检修举升装置能将挂轨机器人脱离横向导轨并下移至距地面一定高度处,并在检查维修之后将其送回并挂接在横向导轨上,以便于对挂轨机器人检查维修。人检查维修。人检查维修。
技术研发人员:吴利军 邓成呈 丁祥宇 马灵涛 吴凡
受保护的技术使用者:杭州申昊科技股份有限公司
技术研发日:2021.11.30
技术公布日:2022/4/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。