1.本实用新型属于采摘机器人技术领域,具体涉及一种基于视觉识别的采摘机器人。
背景技术:
2.在水果的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。水果收获期间需投入的劳力约占整个种植过程的50%~70%。采摘作业质量的好坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。水果收获具有很强的时效性,属于典型的劳动密集型的工作。但是由于采摘作业环境和操作的复杂性,水果采摘的自动化程度仍然很低,目前国内水果的采摘作业基本上还是手工完成。在很多国家随着人口的老龄化和农业劳动力的减少,劳动力不仅成本高,而且还越来越不容易得到,而人工收获水果所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%。高枝水果的采摘还带有一定的危险性。
3.目前的自动采摘机器人通过视觉识别技术控制机械手摘取果实后,需要控制机械手移动较远的距离以将果实安全的放置在收集篮或者地面上,这种方式采摘效率低,机械臂往复移动的过程中对电能的消耗较大且耗时较长。
技术实现要素:
4.目前的自动采摘机器人通过图像识别技术控制机械手摘取果实后,需要控制机械手移动较远的距离以将果实安全的放置在收集篮或者地面上,这种方式采摘效率低,机械臂往复移动的过程中对电能的消耗较大且耗时较长。本实用新型提供了一种基于视觉识别的采摘机器人,安装在夹持机构正下方的承接机构可安全直接的接取夹持机构采摘的果实,无需夹持机构反复移动将果实放置在地面上,有效提高了采集效率。
5.本实用新型提供如下技术方案:一种基于视觉识别的采摘机器人,包括夹持机构和承接机构,所述夹持机构和承接机构均通过连接架固定安装在升降机构的前端,所述升降机构的后端固定安装在转动座的顶面,所述转动座的顶面还固定安装有支架,所述支架的顶端固定安装有摄像机,所述转动座转动安装在履带式底座上,所述履带式底座的顶端固定安装有中央控制模块,所述夹持机构包括外壳体,所述外壳体的后端面固定安装有电机,所述电机的输出轴上固定安装有驱动齿轮,所述驱动齿轮啮合连接有从动齿轮,所述从动齿轮的转轴的一端固定连接有连接臂,所述连接臂一端固定连接的夹臂的外侧固定套装有缓冲套,所述承接机构包括支撑环,所述支撑环固定连接承接袋的顶端,所述承接袋的底端缝固有高耐磨弹性面料,所述高耐磨弹性面料的内侧固定粘接有气囊,所述气囊的侧面固定连接排气管和进气管的一端,所述排气管和进气管的另一端分别固定连接电磁阀的进气端和气泵的出气端。
6.其中,所述从动齿轮的数量为三个,以驱动齿轮的轴线为环绕轴周向等序安装,所述支撑环为圆环形结构,所述承接袋为圆管型结构,承接袋的轴线所在的直线垂直经过三
个夹臂的轴线中点所在的内切圆的圆心;安装在夹持机构正下方的承接袋可接取夹持机构采摘的果实,无需夹持机构反复移动将果实放置在地面上,有效提高了采集效率。
7.其中,所述气囊为内部中空且具有弹性的圆环形橡胶圈结构,所述气泵固定安装在外壳体的后端面上,进气管的内部与气囊的内部相贯通;气泵工作时可向气囊的内部充气使气囊膨胀增大,进而封堵承接袋的底端,在承接上方落下的果实的同时起到有效的缓冲作用,降低果实采摘过程中的损坏率。
8.其中,所述高耐磨弹性面料为圆环形结构,高耐磨弹性面料的侧面缝固连接承接袋的内侧面的底部,高耐磨弹性面料的底面固定粘接气囊的顶面和内侧面;高耐磨弹性面料可随气囊的膨胀而产生弹性变形,对气囊起到有效的保护作用,避免气囊受到剐蹭而破损。
9.其中,所述电磁阀固定安装在外壳体的后端面上,电磁阀的内部与气囊的内部相贯通;气囊内的气体可在电磁阀开启后,在袋内果实的压力下排出气体,复位打开承接袋的底部,从而使承接袋内的储存的果实自动排出。
10.其中,所述缓冲套为具有弹性的聚氨酯圆管结构;套装在夹臂外侧的缓冲套可在夹持机构夹持果实时起到缓冲作用,降低果实破损的概率。
11.其中,所述升降机构的阀路系统中的电磁阀、摄像机、电机、气泵、电磁阀电性连接中央控制模块;本装置中的电气机构可在中央控制模块的计算控制下实现自动采摘果实。
12.本实用新型的有益效果是:安装在夹持机构正下方的承接袋可接取夹持机构采摘的果实,无需夹持机构反复移动将果实放置在地面上,有效提高了采集效率;气泵工作时可向气囊的内部充气使气囊膨胀增大,进而封堵承接袋的底端,在承接上方落下的果实的同时起到有效的缓冲作用,降低果实采摘过程中的损坏率;高耐磨弹性面料可随气囊的膨胀而产生弹性变形,对气囊起到有效的保护作用,避免气囊受到剐蹭而破损;气囊内的气体可在电磁阀开启后,在袋内果实的压力下排出气体,复位打开承接袋的底部,从而使承接袋内的储存的果实自动排出;套装在夹臂外侧的缓冲套可在夹持机构夹持果实时起到缓冲作用,降低果实破损的概率;本装置中的电气机构可在中央控制模块的计算控制下实现自动采摘果实。
13.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
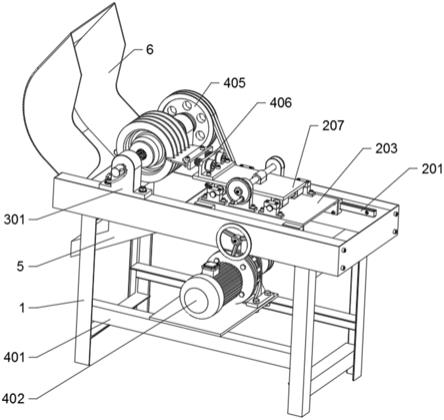
14.图1为本实用新型的结构示意图;
15.图2为本实用新型中夹持机构、承接机构的结构示意图一;
16.图3为本实用新型中夹持机构、承接机构的结构示意图二;
17.图4为本实用新型中夹持机构的剖视图;
18.图5为本实用新型中承接机构的剖视图;
19.图中:1、履带式底座;2、转动座;3、支架;4、摄像机;5、中央控制模块;6、连接架;7、夹持机构;701、外壳体;702、电机;703、驱动齿轮;704、从动齿轮;705、连接臂;706、夹臂;707、缓冲套;8、承接机构;801、支撑环;802、承接袋;803、高耐磨弹性面料;804、气囊;805、排气管;806、进气管;807、电磁阀;808、气泵;9、升降机构。
具体实施方式
20.请参阅图1-图5,本实用新型提供以下技术方案:一种基于视觉识别的采摘机器人,包括夹持机构7和承接机构8,所述夹持机构7和承接机构8均通过连接架6固定安装在升降机构9的前端,所述升降机构9的后端固定安装在转动座2的顶面,所述转动座2的顶面还固定安装有支架3,所述支架3的顶端固定安装有摄像机4,所述转动座2转动安装在履带式底座1上,所述履带式底座1的顶端固定安装有中央控制模块5,所述夹持机构7包括外壳体701,所述外壳体701的后端面固定安装有电机702,所述电机702的输出轴上固定安装有驱动齿轮703,所述驱动齿轮703啮合连接有从动齿轮704,所述从动齿轮704的转轴的一端固定连接有连接臂705,所述连接臂705一端固定连接的夹臂706的外侧固定套装有缓冲套707,所述承接机构8包括支撑环801,所述支撑环801固定连接承接袋802的顶端,所述承接袋802的底端缝固有高耐磨弹性面料803,所述高耐磨弹性面料803的内侧固定粘接有气囊804,所述气囊804的侧面固定连接排气管805和进气管806的一端,所述排气管805和进气管806的另一端分别固定连接电磁阀807的进气端和气泵808的出气端。
21.所述从动齿轮704的数量为三个,以驱动齿轮703的轴线为环绕轴周向等序安装,所述支撑环801为圆环形结构,所述承接袋802为圆管型结构,承接袋802的轴线所在的直线垂直经过三个夹臂706的轴线中点所在的内切圆的圆心;安装在夹持机构7正下方的承接袋802可接取夹持机构7采摘的果实,无需夹持机构7反复移动将果实放置在地面上,有效提高了采集效率。
22.所述气囊804为内部中空且具有弹性的圆环形橡胶圈结构,所述气泵808固定安装在外壳体701的后端面上,进气管806的内部与气囊804的内部相贯通;气泵808工作时可向气囊804的内部充气使气囊804膨胀增大,进而封堵承接袋802的底端,在承接上方落下的果实的同时起到有效的缓冲作用,降低果实采摘过程中的损坏率。
23.所述高耐磨弹性面料803为圆环形结构,高耐磨弹性面料803的侧面缝固连接承接袋802的内侧面的底部,高耐磨弹性面料803的底面固定粘接气囊804的顶面和内侧面;高耐磨弹性面料803可随气囊804的膨胀而产生弹性变形,对气囊804起到有效的保护作用,避免气囊804受到剐蹭而破损。
24.所述电磁阀807固定安装在外壳体701的后端面上,电磁阀807的内部与气囊804的内部相贯通;气囊804内的气体可在电磁阀807开启后,在袋内果实的压力下排出气体,复位打开承接袋802的底部,从而使承接袋802内的储存的果实自动排出。
25.所述缓冲套707为具有弹性的聚氨酯圆管结构;套装在夹臂706外侧的缓冲套707可在夹持机构7夹持果实时起到缓冲作用,降低果实破损的概率。
26.所述升降机构9的阀路系统中的电磁阀、摄像机4、电机702、气泵808、电磁阀807电性连接中央控制模块5;本装置中的电气机构可在中央控制模块5的计算控制下实现自动采摘果实。
27.本实用新型的工作原理及使用流程:摄像机4对周边环境进行图像识别,中央控制模块5对摄像机4传送的图像信号进行计算处理,进而控制装置中各电气机构的运行状态;进行采摘工作时,升降机构9中的液压杆进行合适的伸缩使连接架6上安装的夹持机构7和承接机构8移动至果实的位置,此时电机702的转轴带动驱动齿轮703转动,进而啮合驱动从动齿轮704带动连接臂705转动,连接臂705转动时带动夹臂706及缓冲套707移动夹持采摘
果实,随后电机702反转,果实在重力作用下掉落至下方的承接袋802内,此时气泵808向气囊804的内部充气使气囊804保持充盈的状态,进而在承接上方落下的果实的同时起到有效的缓冲作用,降低果实采摘过程中的损坏率;采摘一定数量的果实后,升降机构9中的液压杆进行合适的伸缩使承接机构8移动至靠近地面的位置,此时气泵808停止工作,电磁阀807开启,在袋内果实的压力下,气囊804内的气体通过排气管805排出,从而使承接袋802内的储存的果实自动排出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。