壁形状测量装置
1.相关申请的交叉引用
2.本国际申请主张基于在2019年9月6日在日本专利局申请的日本专利申请第2019-163205号的优先权,通过参照将日本专利申请第2019-163205号的全部内容引入到本国际申请。
技术领域
3.本公开涉及对沿着道路设置的壁的形状进行测量的壁形状测量装置。
背景技术:
4.在专利文献1中记载有:从搭载于车辆的雷达装置获取壁距离信息,该壁距离信息表示检测出到存在于车辆的侧方的壁为止的距离的结果,基于该壁距离信息和车辆的行驶轨迹来计算壁形状。
5.专利文献1:日本特开2016-85567号公报
6.然而,发明者的详细研究的结果为,在专利文献1所记载的技术中,发现了如下的课题:若成为在搭载了雷达装置的车辆(以下,为本车)与壁之间存在其他的车辆的状况,则在将其他的车辆的侧面错误识别为壁的情况下,壁形状被计算为比实际的壁的位置更靠近本车,产生壁形状的错误计算。
技术实现要素:
7.本公开抑制壁形状被计算为比实际的壁的位置更靠近本车。
8.本公开的一个方式提供搭载于车辆的壁形状测量装置,具备壁距离获取部、壁形状计算部、骤变判断部以及外插部。
9.壁距离获取部被构成为:使用通过接收向车辆的周围中的预先设定的检测范围发送并反射的雷达波而得到的接收信号,反复判断是否检测出沿着车辆行驶的道路设置的壁状物体,在判断为检测出壁状物体的情况下,使用接收信号,获取表示到壁状物体为止的距离的壁距离值。
10.壁形状计算部被构成为:使用车辆的行驶轨迹和由壁距离获取部反复获取到的过去的多个壁距离值,计算表示壁状物体的表面上的多个部位的位置的多个壁形状值。
11.骤变判断部被构成为:基于预先设定的骤变判断条件,判断由壁距离获取部获取到的壁距离值是否急剧变化。
12.外插部被构成为:在骤变判断部判断为壁距离值急剧变化的情况下,对骤变判断部判断为壁距离值急剧变化以后的壁形状值进行外插。
13.这样构成的本公开的壁形状测量装置在壁距离值急剧变化的情况下,对壁距离值急剧变化以后的壁形状值进行外插。因此,在本公开的壁形状测量装置中,例如当从在本车与壁之间不存在其他的车辆的状况变化为在本车与壁之间存在其他的车辆的状况时,在将其他的车辆的侧面错误识别为壁的情况下,壁距离值急剧变化,基于壁距离值急剧变化前
的壁形状值,来计算壁距离值急剧变化以后的壁形状值。由此,本公开的壁形状测量装置能够抑制壁形状被计算为比实际的壁的位置靠近本车。
附图说明
14.图1是表示车载系统的结构的框图。
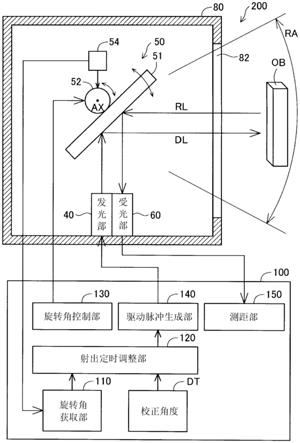
15.图2是表示雷达装置的结构的框图。
16.图3是表示壁计算处理的流程图。
17.图4是表示滤波值计算处理的流程图。
18.图5是表示外插处理的流程图。
19.图6是表示第一实施方式的插值处理的流程图。
20.图7是表示插值方法的图。
21.图8是表示计算壁形状的方法的图。
22.图9是表示由于外插处理的有无引起的壁形状的差异的图。
23.图10是表示由于插值处理的有无引起的壁形状的差异的图。
24.图11是表示第二实施方式的插值处理的流程图。
25.图12是表示第三实施方式的插值处理的流程图。
具体实施方式
26.[第一实施方式]
[0027]
以下,与附图一同说明本公开的第一实施方式。
[0028]
如图1所示,本实施方式的车载系统1具备驾驶辅助ecu2、雷达系统3以及警报装置4。ecu为electronic control unit(电子控制单元)的缩写。在本实施方式中,车载系统1搭载于作为四轮汽车的车辆。以下,将搭载有车载系统1的车辆也称为本车。
[0029]
雷达系统3具备多个雷达装置11、12、13、14
…
。在本实施方式中,雷达装置11设置于车辆的后部右侧面,雷达装置12设置于车辆的后部左侧面,雷达装置13设置于车辆的前部右侧面,雷达装置14设置于车辆的前部左侧面。
[0030]
雷达装置11、12被配置为在其检测范围内包含沿着本车的前进方向的后方向和与前进方向正交的横向。雷达装置11获取与在车辆的右侧和右后侧存在的物体相关的信息。雷达装置12获取与在车辆的左侧和左后侧存在的物体相关的信息。
[0031]
雷达装置13、14被配置为在其检测范围内包含沿着本车的前进方向的前方向和与前进方向正交的横向。雷达装置13获取与在车辆的右侧和右前侧存在的物体相关的信息。雷达装置14获取与在车辆的左侧和左前侧存在的物体相关的信息。
[0032]
此外,在雷达装置中采用的物标的检测方式已知有例如fmcw方式和双频cw方式等各种检测方式。本实施方式的雷达装置11、12、13、14
…
被构成为fmcw方式的所谓的“毫米波雷达”。
[0033]
构成雷达系统3的多个雷达装置11、12、13、14
…
都具有基本上相同的结构和功能。
[0034]
如图2所示,雷达装置11、12、13、14
…
在每次经过处理周期时反复执行发射雷达波并接收反射波,基于该接收信号sr,检测到反射了雷达波的物标为止的距离d、物标的相对速度vr以及物标的方位θ的处理。
[0035]
雷达装置11、12、13、14
…
基于检测出的观测值(d,vr,θ),生成用于辅助驾驶员对车辆的驾驶的驾驶辅助信息,并将该驾驶辅助信息输出到驾驶辅助ecu2。
[0036]
驾驶辅助ecu2基于从雷达装置11、12、13、14
…
输入的驾驶辅助信息,执行用于辅助驾驶员对车辆的驾驶的各种处理。在与驾驶辅助相关的处理中,例如也可以包含向驾驶员发出存在接近物这样的警报的处理、以及通过控制制动系统和转向系统等而避免与接近物的碰撞或者执行用于自动进行车道变更的车辆控制的处理等。
[0037]
雷达装置11、12、13、14
…
具备发送电路20、分配器30、发送天线40、接收天线50、接收电路60、处理单元70、输出单元80以及网络接口(以下,为网络i/f)90。
[0038]
发送电路20为用于向发送天线40供给发送信号ss的电路。发送电路20将毫米波段的高频信号输出到位于发送天线40的上游的分配器30。具体而言,发送电路20以调制周期tm交替地反复上行调制区间和下行调制区间,将在各调制区间中生成的高频信号输出到分配器30。此外,发送电路20在上行调制区间中,生成被频率调制为频率增加的高频信号,在下行调制区间中,生成被频率调制为频率减少的高频信号。
[0039]
分配器30将从发送电路20输入的高频信号功率分配为发送信号ss和本地信号l。
[0040]
发送天线40基于从分配器30供给的发送信号ss,发射与发送信号ss对应的频率的雷达波。
[0041]
接收天线50是用于接收由物标反射的雷达波即反射波的天线。该接收天线50被构成为将多个天线元件51配置成一列的线性阵列天线。各天线元件51对反射波的接收信号sr被输入接收电路60。
[0042]
接收电路60对从构成接收天线50的各天线元件51输入的接收信号sr进行处理,而生成并输出每个天线元件51的差拍信号bt。具体而言,接收电路60针对每个天线元件51,使用混频器61对从该天线元件51输入的接收信号sr与从分配器30输入的本地信号l进行混合,由此生成并输出每个天线元件51的差拍信号bt。
[0043]
以下,将通过在发送上行调制区间的雷达波的期间中混合接收信号sr和发送信号而生成的差拍信号bt称为上行差拍信号。另外,将通过在发送下行调制区间的雷达波的期间中混合接收信号sr和发送信号而生成的差拍信号bt称为下行差拍信号。
[0044]
然而,在到输出差拍信号bt为止的过程中,包含放大接收信号sr的过程、从差拍信号bt中除去不需要的信号成分的过程、以及将差拍信号bt变换为数字数据的过程。这样,接收电路60将所生成的每个天线元件51的差拍信号bt变换为数字数据并输出。所输出的每个天线元件51的差拍信号bt被输入处理单元70。
[0045]
处理单元70为以具备cpu71、rom72和ram73等的微型计算机为中心构成的电子控制装置。通过由cpu71执行储存于非迁移实体记录介质的程序来实现微型计算机的各种功能。在该例中,rom72对应于储存了程序的非迁移实体记录介质。另外,通过该程序的执行,而执行与程序对应的方法。此外,也可以通过一个或多个ic等以硬件方式构成由cpu71执行的功能的一部分或者全部。另外,构成处理单元70的微型计算机的数量也可以是一个,也可以是多个。
[0046]
另外,处理单元70也可以具备执行快速傅立叶变换(以下,为fft)处理等的协同处理器。fft为fast fourier transform(快速傅立叶变换)的缩写。
[0047]
网络i/f90为用于处理单元70经由网络6与其他的控制系统5进行数据通信的通信
接口。在本实施方式中,网络6是作为车载网络而公知的can。can为controller area network(控制器局域网络)的缩写。can为注册商标。
[0048]
其他的控制系统5包含驾驶辅助ecu2以外的其他的多个车载装置(例如,ecu和传感器等)。
[0049]
从其他的控制系统5定期地向网络6送出各种测距信息(odometry information)。处理单元70经由网络6获取测距信息。在所获取的测距信息中包含车辆的速度(以下,为车速)vs、车辆的横摆率ω、车辆的转向角α、车辆的转弯半径rs等。
[0050]
其他的控制系统5基于来自未图示的车速传感器、横摆率传感器和转向角传感器的检测信号,计算车速vs、横摆率ω以及转向角α,进一步基于转向角α并利用规定的运算方法计算转弯半径rs。此外,也可以取代处理单元70经由网络6获取转弯半径rs,而处理单元70基于经由网络6获取到的转向角α在雷达装置11、12、13、14
…
的内部计算转弯半径rs。
[0051]
在这样构成的车载系统1中,雷达装置11、12的cpu71执行壁计算处理。
[0052]
首先,对由雷达装置11的cpu71执行的壁计算处理的顺序进行说明。壁计算处理是在处理单元70的动作中在每次经过上述的处理周期时反复执行的处理。
[0053]
若执行壁计算处理,则如图3所示,cpu71首先在s10中,从其他的控制系统5经由网络6获取测距信息。在s10中获取的测距信息中,至少包含车速vs、横摆率ω、转向角α以及转弯半径rs。cpu71将在s10中获取到的测距信息中的、从上述的处理周期的n周期前到当前为止的测距信息存储于ram73。n为2以上的整数。此外,n是考虑在本车中检测的距离(例如,100m后方)等以及本车车速等而决定的。
[0054]
然后,cpu71在s20中,计算从上述的处理周期的n周期前到当前为止的本车的行驶轨迹。具体而言,cpu71使用在s10中获取到的测距信息(即,到n周期前为止的各处理周期中的获取值),来计算以当前位置为基准的从1周期前到n周期前为止的各处理周期中的本车位置的推断值(以下,本车推断位置)。而且,cpu71将连结当前位置和计算出的各周期的本车推断位置的线作为本车行驶轨迹。此外,根据测距信息计算本车行驶轨迹的技术是公知的,因此省略该详细内容的说明。
[0055]
此外,在s10中获取的测距信息中,由于车速传感器和横摆率传感器的检测误差和噪声等各种因素,而包含误差。因此,cpu71在s20中,针对到n周期前为止的过去的处理周期中的各本车推断位置,计算考虑了测距信息的误差的、本车推断位置的推断存在范围。推断存在范围能够表示为以本车推断位置为基准的误差方差。并且,通过将该误差方差投影到车道宽度方向(即,与行进方向垂直的方向),能够将本车推断位置的车道宽度方向的存在概率表示为以本车推断位置为中心的规定的概率分布。
[0056]
在本实施方式中,将因测距信息的误差因素引起的本车推断位置的误差方差模型化来作为正态分布。即,使用测距信息计算出的本车推断位置处的存在概率为正态分布中的概率最高的峰值,越是在车道宽度方向上远离本车推断位置,则根据正态分布,存在概率越减少。
[0057]
然后,cpu71在s30中,计算相邻车道概率映射图。具体而言,cpu71针对到n周期前为止的各本车推断位置,规定相邻车道的位置(具体而言,车道宽度方向的两端位置)。然后,将本车推断位置处的误差方差投影到该规定的相邻车道的位置,计算相邻车道的概率分布。
[0058]
具体而言,cpu71规定划分相邻车道的两个车道划分线(即,相邻车道的两侧的各车道划分线)的位置、即接近本车辆的一侧的车道划分线(以下,为内侧划分线)的位置(以下,为内侧划分位置)的推断值即内侧推断划分位置、以及远离本车辆的一侧的车道划分线(以下,为外侧划分线)的位置(以下,为外侧划分位置)的推断值即外侧推断划分位置。然后,cpu71通过将本车推断位置的误差方差直接投影到各推断划分位置,从而设定各划分位置的车道宽度方向的概率分布。
[0059]
即,对于内侧划分位置,内侧推断划分位置为正态分布的峰值,若远离该内侧推断划分位置,则根据正态分布,内侧划分位置的存在概率减少。对于外侧划分位置也是,外侧推断划分位置为正态分布的峰值,若远离该外侧推断划分位置,则根据正态分布,外侧划分位置的存在概率减少。
[0060]
然后,cpu71通过将到n周期前为止的各处理周期中的、内侧划分位置的存在概率相等的点(例如,规定概率p1、p2、p3的点)连结,并且将外侧划分位置的存在概率相等的点(例如,与内侧相同的规定概率p1、p2、p3的点)连结,由此计算相邻车道概率映射图。该相邻车道概率映射图是表示存在相邻车道的概率为p1、p2、p3的区域的映射图,换言之,也可以说是表示在由该相邻车道概率映射图表示的区域内存在目标的情况下,该目标存在于相邻车道的概率为p1、p2、p3的映射图。
[0061]
此外,在本实施方式中,概率p1、p2、p3为100%、70%、30%。而且,表示概率p1的区域的映射图由连结1σ(即,68.3%)的点的线形成。表示概率p2的区域的映射图由连结2σ(即,95.5%)的点的线形成。表示概率p3的区域的映射图由连结3σ(即,99.7%)的点的线形成。
[0062]
接着,cpu71在s40中,获取壁距离瞬时值。具体而言,首先,cpu71分别针对上行差拍信号和下行差拍信号的功率谱,在峰值提取频率范围内提取多个峰值(在本实施方式中,按照功率从高到低的顺序的三个峰值),实施方位展开处理(例如,music、dbf、capon等)。
[0063]
通过对上行差拍信号和下行差拍信号分别执行频率解析处理(例如,fft处理)来计算功率谱。在功率谱中,针对每个频率仓表示差拍信号的功率。频率仓是成为功率谱的单位刻度的频率范围。针对多个天线元件51中的各个天线元件得到功率谱。在s40中成为提取峰值的对象的功率谱是对从各天线元件51得到的功率谱进行平均后的平均功率谱。
[0064]
并且,cpu71从方位展开谱中进一步提取方位峰值,在上行和下行的多个方位峰值中,实施考虑了壁的特征的对匹配。然后,cpu71在对匹配成立的情况下,判断为检测出壁,在对匹配不成立的情况下,判断为无法检测壁。
[0065]
此外,cpu71在以下的第一对匹配判断条件、第二对匹配判断条件以及第三对匹配判断条件全部成立的情况下,判断为对匹配成立。
[0066]
第一对匹配判断条件是上行与下行的频率大致一致。第一对匹配判断条件是基于正侧面的壁相对于本车不具有相对速度而设定的条件。
[0067]
第二对匹配判断条件是上行与下行的方位大致一致。第二对匹配判断条件是基于上行和下行都检测出正侧面方向的壁而设定的条件。
[0068]
第三对匹配判断条件是上行与下行的功率大致一致。第三对匹配判断条件是基于从同一物标反射的接收信号sr的功率基本上一致而设定的条件。
[0069]
这里,在判断为检测出壁的情况下,cpu71获取根据对匹配成立的峰值对而计算出
的距离d来作为壁距离瞬时值。
[0070]
然后,cpu71在s50中,执行滤波值计算处理。
[0071]
接下来,对滤波值计算处理的顺序进行说明。
[0072]
若执行滤波值计算处理,则如图4所示,cpu71首先在s210中,判断过去是否检测出右侧的壁。此外,s210中的过去是指从处理单元70最近起动之后到当前时刻为止的期间。
[0073]
这里,在过去未检测出右侧的壁的情况下,cpu71在s220中,判断在本次的周期中是否检测出右侧的壁。这里,在本次的处理周期中检测出右侧的壁的情况下,cpu71在s230中,更新设于ram73的壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将在s40中获取到的壁距离瞬时值(以下,为本次值)储存为壁滤波值fv(n)。
[0074]
然后,cpu71在s240中,将设于ram73的外插计数器ct1初始化(即,设定为0),结束滤波值计算处理。
[0075]
另外,在s220中在本次的处理周期中未检测出右侧的壁的情况下,cpu71在s250中,更新壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将预先设定的初始值储存为壁滤波值fv(n)。在本实施方式中,初始值被设定为相当于15m的值。
[0076]
然后,cpu71在s260中,将外插计数器ct1初始化,结束滤波值计算处理。
[0077]
另外,在s210中在过去检测出右侧的壁的情况下,cpu71在s270中,判断在本次的处理周期中是否检测出右侧的壁。这里,在本次的处理周期中未检测出右侧的壁的情况下,cpu71移至s320。另一方面,在本次的处理周期中检测出右侧的壁的情况下,cpu71在s280中,计算差分dt1。具体而言,在上次的处理周期中未执行后述的外插处理的情况下,cpu71将表示储存为壁滤波值fv(n)的值(即,上次的周期中的壁滤波值)与本次值的差分的值储存为设于ram73的差分dt1。另一方面,在上次的周期中执行了外插处理的情况下,cpu71将表示紧接开始外插处理之前的壁滤波值与本次值的差分的值储存为差分dt1。
[0078]
然后,cpu71在s290中,判断储存为差分dt1的值是否小于预先设定的第一阈值vth1。
[0079]
这里,在储存为差分dt1的值小于第一阈值vth1的情况下,cpu71在s300中,更新壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将通过式(1)的右边而计算出的值储存为壁滤波值fv(n)。此外,式(1)中的tv1为本次值。
[0080]
fv(n)=tv1
×
0.3 fv(n-1)
×
0.7
…
(1)
[0081]
然后,cpu71在s310中,将外插计数器ct1初始化,结束滤波值计算处理。
[0082]
另外,在s290中储存为差分dt1的值为第一阈值vth1以上的情况下,cpu71移至s320。
[0083]
然后,若移至s320,则cpu71执行外插处理,结束滤波值计算处理。
[0084]
接下来,对外插处理的顺序进行说明。
[0085]
若执行外插处理,则如图5所示,cpu71首先在s410中,判断外插计数器ct1的值是
否小于预先设定的第二阈值vth2。此外,在本实施方式中,第二阈值vth2被设定为10。
[0086]
这里,在外插计数器ct1的值小于第二阈值vth2的情况下,cpu71在s420中,更新壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将壁滤波值fv(n-1)的值储存为壁滤波值fv(n)。
[0087]
然后,cpu71在s430中,使外插计数器ct1自加1(即,加1),结束外插处理。
[0088]
另外,在s410中外插计数器ct1的值为第二阈值vth2以上的情况下,cpu71在s440中,判断外插计数器ct1的值是否小于预先设定的第三阈值vth3。此外,在本实施方式中,第三阈值vth3被设定为30。
[0089]
这里,在外插计数器ct1的值小于第三阈值vth3的情况下,cpu71在s450中,更新壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将通过式(2)的右边而计算出的值储存为壁滤波值fv(n)。此外,式(2)中的md为预先设定的最大距离。在本实施方式中,最大距离md被设定为相当于15m的值。即,cpu71在式(1)中将最大距离md作为本次值tv1来计算壁滤波值fv(n)。
[0090]
fv(n)=md
×
0.3 fv(n-1)
×
0.7
…
(2)
[0091]
然后,cpu71在s460中,使外插计数器ct1自加1,结束外插处理。
[0092]
另外,在s440中外插计数器ct1的值为第三阈值vth3以上的情况下,cpu71在s470中,更新壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)。具体而言,首先,cpu71将壁滤波值fv(n)、fv(n-1)、
…
、fv(1)的值分别储存为壁滤波值fv(n-1)、fv(n-2)、
…
、fv(0)。接着,cpu71将预先设定的无效值储存为壁滤波值fv(n)。在本实施方式中,无效值被设定为相当于100m的值。
[0093]
然后,cpu71在s480中,使外插计数器ct1自加1,结束外插处理。
[0094]
然后,若滤波值计算处理结束,则如图3所示,cpu71在s60中,执行插值处理。
[0095]
接下来,对插值处理的顺序进行说明。
[0096]
若执行插值处理,则如图6所示,cpu71首先在s610中,判断过去是否检测出右侧的壁。
[0097]
这里,在过去未检测出右侧的壁的情况下,cpu71结束插值处理。另一方面,在过去检测出右侧的壁的情况下,cpu71在s620中,判断在本次的处理周期中是否检测出右侧的壁。
[0098]
这里,在本次的处理周期中未检测出右侧的壁的情况下,cpu71结束插值处理。另一方面,在本次的处理周期中检测出右侧的壁的情况下,cpu71在s630中,判断在上次的处理周期中是否执行了外插处理。
[0099]
这里,在上次的处理周期中未执行外插处理的情况下,cpu71结束插值处理。另一方面,在上次的处理周期中执行了外插处理的情况下,cpu71在s640中,判断外插计数器ct1的值是否小于预先设定的第四阈值vth4。此外,在本实施方式中,第四阈值vth4被设定为40。
[0100]
这里,在外插计数器ct1的值为第四阈值vth4以上的情况下,cpu71结束插值处理。另一方面,在外插计数器ct1的值小于第四阈值vth4的情况下,cpu71在s650中计算差分
dt3。具体而言,cpu71将表示紧接最近开始外插处理之前的壁滤波值与本次值的差分的值储存为设于ram73的差分dt3。
[0101]
然后,cpu71在s660中,判断储存为差分dt3的值是否小于预先设定的第五阈值vth5。在本实施方式中,第五阈值vth5被设定为相当于1m的值。
[0102]
这里,在储存为差分dt3的值为第五阈值vth5以上的情况下,cpu71结束插值处理。另一方面,在储存为差分dt3的值小于第五阈值vth5的情况下,cpu71在s670中,对外插期间中的壁滤波值进行插值,结束插值处理。具体而言,cpu71例如使用紧接最近开始外插处理之前的壁滤波值和壁滤波值fv(n)进行线形插值,由此计算外插期间中的壁滤波值。
[0103]
例如,如图7所示,期间pt1为检测壁的期间,壁滤波值在5m至6m之间变动。期间pt2为进行外插处理的期间,在最初的10周期中,壁滤波值保持上次值。而且,若超过10周期,则壁滤波值逐渐接近最大距离(即,15m)。并且,若超过30周期,则壁滤波值为无效值。期间pt3为检测壁的期间,壁滤波值在6m附近变动。
[0104]
插值处理像插值直线cl所示那样,通过利用直线将紧接进行外插处理之前的壁滤波值pf1和紧接外插处理结束之后的壁滤波值pf2连接,来计算外插期间中的壁滤波值。
[0105]
然后,若插值处理结束,则如图3所示,cpu71在s70中,计算壁形状值。具体而言,如图8所示,cpu71将构成从当前到n周期前为止的本车的行驶轨迹tr的本车推断位置cp(n)、cp(n-1)、cp(n-2)
…
、cp(1)、cp(0)中的各个位置作为起点,将沿着与前进方向正交的横向向右侧分开了壁滤波值fv(n)、fv(n-1)、fv(n-2)、
…
、fv(1)、fv(0)的位置设为壁位置wp(n)、wp(n-1)、wp1(n-2)、
…
、wp(1)、wp(0)。壁位置wp(n)~wp1(0)为壁形状值。
[0106]
然后,若s70的处理结束,则如图3所示,cpu71在s80中,计算相邻车道中的目标的存在概率。具体而言,cpu71将在s70中计算出的壁形状值加入到在s30中计算出的相邻车道概率映射图,来计算目标的存在概率分布。即,cpu71基本上根据相邻车道概率映射图来计算目标的存在概率。然而,在存在壁的情况下,cpu71对于相邻车道概率映射图中的壁的外侧的区域,一律地将相邻车道的存在概率设为0,对于该区域,目标的存在概率为0。或者,cpu71也可以删除在壁的外侧检测出的物标。
[0107]
然后,cpu71在s90中,判断相邻车道中的目标的存在的有无。具体而言,cpu71基于在s80中计算出的目标存在概率和检测出的目标的位置信息,判断目标是否存在于相邻车道。目标的相邻车道存在概率不是仅通过当前周期的值来计算,而是通过使过去的相邻车道存在概率乘以遗忘系数后的滤波值来计算最终的相邻车道存在概率。
[0108]
例如,在目标存在概率的滤波值为70%以上的情况下,cpu71判断为该目标存在于相邻车道。相反,在目标存在概率的滤波值小于70%的情况下,cpu71判断为该目标不存在于相邻车道。
[0109]
接着,cpu71在s100中,提取警报对象物。具体而言,cpu71在s90中判断为目标存在于相邻车道的情况下,确认该目标与本车的位置关系。而且,在两者的位置关系满足规定的条件的情况下,cpu71将该目标提取为警报对象物。规定的条件例如是以下的第一提取条件和第二提取条件中的至少一方成立。第一提取条件是本车与目标的距离(以下,相对距离)为规定距离以下。第二提取条件是根据雷达装置所检测的相对速度推断出的到本车为止的到达时间为规定时间以下。
[0110]
然后,cpu71在s110中,执行警报输出处理,结束壁计算处理。具体而言,cpu71在
s100中提取出警报对象物的情况下,向驾驶辅助ecu2输出警报指示,该警报指示指示表示该警报对象物的存在的警报的输出。驾驶辅助ecu2若获取警报指示,则使警报装置4输出警报指示所表示的内容的警报。
[0111]
由雷达装置12的cpu71执行的壁计算处理除了将左侧的壁作为对象的方面以外,与由雷达装置11的cpu71执行的壁计算处理相同。因此,省略由雷达装置12的cpu71执行的壁计算处理的顺序的说明。
[0112]
图9所示的图表gr1的线wf1表示在产生壁的错误检测的情况下不进行外插处理时的壁形状。在由椭圆el1围起的部分,壁形状被计算为靠近本车。
[0113]
另一方面,图9所示的图表gr2的线wf2表示在产生与图表gr1同样的壁错误检测的情况下进行外插处理时的壁形状。在由配置在与椭圆el1相同的位置的椭圆el2围起的部分,壁形状被改善。
[0114]
图9所示的图表gr3的线wf3表示在产生与图表gr1不同的壁错误检测的情况下不进行外插处理时的壁形状。在由椭圆el3围起的部分,壁形状被计算为靠近本车。
[0115]
另一方面,图9所示的图表gr4的线wf4表示在产生与图表gr3同样的壁错误检测的情况下进行外插处理时的壁形状。在由配置在与椭圆el3相同的位置的椭圆el4围起的部分,壁形状未被计算为靠近本车,壁形状被改善。然而,壁形状被计算为相对于实际的壁靠外侧。
[0116]
图10所示的图表gr5与图9所示的图表gr4相同。即,图10所示的图表gr5的线wf5表示在产生与图表gr3同样的壁错误检测的情况下,进行外插处理,不进行插值处理时的壁形状。在由椭圆el5围起的部分,壁形状被计算为相对于实际的壁靠外侧。
[0117]
另一方面,图10所示的图表gr6的线wf6表示在产生与图表gr5同样的壁错误检测的情况下进行插值处理时的壁形状。图表gr6的虚线wf7与图表gr5的线wf5相同。在由配置于与椭圆el5相同的位置的椭圆el6围起的部分,壁形状未被计算为靠近本车,并且未被计算为相对于实际的壁靠外侧。即,壁形状被计算为实际的壁的位置附近,壁形状被改善。
[0118]
这样构成的雷达装置11、12使用通过接收向本车的周围中的预先设定的检测范围发送并反射的雷达波而得到的接收信号sr,反复判断是否检测出沿着本车行驶的道路设置的壁。而且,雷达装置11、12在判断为检测出壁的情况下,使用接收信号sr,获取表示到壁为止的距离的壁距离瞬时值。
[0119]
雷达装置11、12使用车辆的行驶轨迹和反复获取到的过去的多个壁距离瞬时值,计算表示壁的表面上的多个部位的位置的多个壁形状值。
[0120]
雷达装置11、12基于预先设定的骤变判断条件来判断获取到的壁距离瞬时值是否急剧变化。骤变判断条件是差分dt1小于第一阈值vth1以及差分dt2小于第一阈值vth1。
[0121]
雷达装置11、12在判断为壁距离瞬时值急剧变化的情况下,对判断为壁距离瞬时值急剧变化以后的壁形状值进行外插。
[0122]
这样,雷达装置11、12在壁距离瞬时值急剧变化的情况下,对壁距离瞬时值急剧变化以后的壁形状值进行外插。因此,在雷达装置11、12中,例如若从在本车与壁之间不存在其他的车辆的状况变化为在本车与壁之间存在其他的车辆的状况,则壁距离瞬时值急剧变化,基于壁距离瞬时值急剧变化前的壁形状值,来计算壁距离值急剧变化以后的壁形状值。由此,雷达装置11、12能够抑制壁形状被计算为比实际的壁的位置靠近本车。
[0123]
雷达装置11、12计算对壁距离瞬时值实施滤波处理后的壁滤波值,并且使用行驶轨迹和多个壁滤波值来计算多个壁形状值。而且,在外插次数(即,外插计数器ct1的值)小于预先设定的第二阈值vth2的情况下,驾驶辅助ecu2通过将本次的壁滤波值保持为上次的壁滤波值来对壁形状值进行外插。由此,雷达装置11、12能够抑制壁形状被计算为比实际的壁的位置靠近本车。
[0124]
在外插次数小于设定为比第二阈值vth2大的第三阈值vth3的情况下,雷达装置11、12通过使壁滤波值接近预先设定的最大距离md来对壁形状值进行外插。由此,雷达装置11、12能够抑制壁形状被计算为比实际的壁的位置靠近本车。
[0125]
在外插次数为第三阈值vth3以上的情况下,雷达装置11、12通过将壁滤波值设定为被设定为比最大距离md大的无效值,来对壁形状值进行外插。由此,雷达装置11、12能够通过壁形状值来表示壁形状的计算结果无效。
[0126]
未进行外插时的骤变判断条件是本次的壁距离瞬时值与上次的壁滤波值的差分为第一阈值vth1以上。另外,进行外插时的骤变判断条件是本次的壁距离瞬时值与紧接执行外插之前的壁滤波值的差分为第一阈值vth1以上。
[0127]
雷达装置11、12判断是否检测出壁。此外,在本次的壁距离瞬时值与紧接执行外插之前的壁滤波值的差分小于预先设定的第五阈值vth5的情况下,雷达装置11、12判断为检测出壁。而且,在判断为检测出壁,并且执行外插的外插期间(即,外插计数器ct1的值)小于预先设定的第四阈值vth4的情况下,驾驶辅助ecu2对外插期间中的多个壁形状值进行插值。由此,雷达装置11、12能够抑制壁形状与实际的壁的位置大幅不同。
[0128]
在以上说明的实施方式中,雷达装置11、12相当于壁形状测量装置,s40相当于作为壁距离获取部的处理,s10、s20、s50、s70相当于作为壁形状计算部的处理。
[0129]
另外,s280、s290相当于作为骤变判断部的处理,s320相当于作为外插部的处理。
[0130]
另外,右侧的壁和左侧的壁相当于壁状物体,壁距离瞬时值相当于壁距离值,壁滤波值fv相当于壁距离滤波值。
[0131]
另外,外插计数器ct1的值相当于外插次数,第二阈值vth2相当于保持判断值,第三阈值vth3相当于最大判断值,最大距离md相当于最大值,第一阈值vth1相当于骤变判断值。
[0132]
另外,s650、s660相当于作为壁检测判断部的处理,s640、s670相当于作为期间插值部的处理,外插计数器ct1的值相当于外插期间,第四阈值vth4相当于插值判断时间,第五阈值vth5相当于壁检测判断值。
[0133]
[第二实施方式]
[0134]
以下,与附图一同对本公开的第二实施方式进行说明。此外,在第二实施方式中,对与第一实施方式不同的部分进行说明。对共用的结构标注相同的附图标记。
[0135]
第二实施方式的车载系统1在变更插值处理的方面与第一实施方式不同。
[0136]
如图11所示,第二实施方式的插值处理在省略s640而追加s632、s634的方面与第一实施方式不同。
[0137]
即,在s630中在上次的处理周期中执行了外插处理的情况下,cpu71在s632中,计算外插期间中的行驶距离ml。具体而言,cpu71基于外插计数器ct1的值,来确认开始外插处理的外插开始定时。另外,cpu71从外插开始定时的本车推断位置到当前时刻的本车推断位
置cp(n)为止追踪行驶轨迹tr,计算所追踪的距离。然后,cpu71将表示计算出的距离的值储存为设于ram73的行驶距离ml。
[0138]
接着,cpu71在s634中,判断储存为行驶距离ml的值是否小于预先设定的第六阈值vth6。这里,在储存为行驶距离ml的值为第六阈值vth6以上的情况下,cpu71结束外插处理。另一方面,在储存为行驶距离ml的值小于第六阈值vth6的情况下,cpu71移至s650。
[0139]
这样构成的雷达装置11、12判断是否检测出壁。而且,在判断为检测出壁,并且在外插期间内本车行驶的行驶距离ml小于预先设定的第六阈值vth6的情况下,雷达装置11、12对外插期间中的多个壁形状值进行插值。由此,雷达装置11、12能够抑制壁形状与实际的壁的位置大幅不同。
[0140]
在以上说明的实施方式中,s632、s634、s670相当于作为距离插值部的处理,第六阈值vth6相当于插值判断距离。
[0141]
[第三实施方式]
[0142]
以下,与附图一同对本公开的第三实施方式进行说明。此外,在第三实施方式中,对与第二实施方式不同的部分进行说明。对共用的结构标注相同的附图标记。
[0143]
第三实施方式的车载系统1在变更插值处理的方面与第二实施方式不同。
[0144]
如图12所示,第三实施方式的插值处理在追加s640的方面与第二实施方式不同。
[0145]
即,在s634中储存为行驶距离ml的值小于第六阈值vth6的情况下,cpu71移至s640。
[0146]
若移至s640,则cpu71判断外插计数器ct1的值是否小于第四阈值vth4。这里,在外插计数器ct1的值为第四阈值vth4以上的情况下,cpu71结束插值处理。另一方面,在外插计数器ct1的值小于第四阈值vth4的情况下,cpu71移至s650。
[0147]
这样构成的雷达装置11、12判断是否检测出壁。而且,在判断为检测出壁,并且外插期间小于预先设定的第四阈值vth4,并且在外插期间内本车行驶的行驶距离ml小于预先设定的第六阈值vth6的情况下,雷达装置11、12对外插期间中的多个壁形状值进行插值。由此,雷达装置11、12能够抑制壁形状与实际的壁的位置大幅不同。
[0148]
在以上说明的实施方式中,s632、s634、s640、s670相当于作为期间距离插值部的处理。
[0149]
以上,对本公开的一个实施方式进行了说明,但本公开不限于上述实施方式,能够进行各种变形来实施。
[0150]
[变形例1]
[0151]
例如在上述实施方式中,表示采用fmcw方式来检测物标的方式,检测方式不限于此,例如也可以采用双频cw方式、fcm方式来检测物标。
[0152]
本公开所记载的处理单元70及其方法也可以由专用计算机实现,该专用计算机通过构成被编程为执行由计算机程序具体化的一个至多个功能的处理器和存储器而被提供。或者,本公开所记载的处理单元70及其方法也可以由专用计算机实现,该专用计算机通过由一个以上的专用硬件逻辑电路构成处理器而被提供。或者,本公开所记载的处理单元70及其方法也可以由一个以上的专用计算机实现,该专用计算机通过被编程为执行一个至多个功能的处理器和存储器与由一个以上的硬件逻辑电路构成的处理器的组合而构成。另外,计算机程序也可以作为由计算机执行的指令,存储于计算机能够读取的非迁移有形记
录介质。在实现处理单元70所包含的各部的功能的方法中,并非一定需要包含软件,其全部的功能也可以使用一个或多个硬件来实现。
[0153]
也可以通过多个构成要素实现上述实施方式的一个构成要素所具有的多个功能、或者通过多个构成要素实现一个构成要素所具有的一个功能。另外,也可以通过一个构成要素实现多个构成要素所具有的多个功能、或者通过一个构成要素实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的结构的一部分。另外,也可以相对于其他的上述实施方式的结构附加或者置换上述实施方式的结构的至少一部分。
[0154]
除了上述的雷达装置11、12之外,还能够以将该雷达装置11、12作为构成要素的系统、用于使计算机作为该雷达装置11、12发挥功能的程序、记录了该程序的半导体存储器等非迁移实态记录介质、壁形状测量方法等各种方式来实现本公开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。