1.本公开涉及雷电探测技术领域,具体涉及一种雷电探测装置。
背景技术:
2.雷雨天行车在经过树木、高层建筑时,存在雷击风险,如果能够对雷电发生的方位进行探测,根据雷电发生方位规划行车路线,避开雷电发生位置则可有效降低或避免雷击风险。现有技术中的雷电探测装置普遍为探测站形式的固定结构,这种雷电探测装置采用获取雷电电流或是探测雷电磁场的方式来探测雷电发生位置,普遍存在着结构复杂、体积大、不可移动的缺点,不能应用于车载等移动使用的场景中。
技术实现要素:
3.为了解决上述现有技术存在的问题,本公开目的在于提供一种雷电探测装置。本公开通过声电传感器和光电传感器的结合,可准确探测雷电发生位置的方位和距离, 运算简易、结构简单、体积小,适用于车载等移动使用的场景中。
4.本公开所述的一种雷电探测装置,包括: 壳体;处理器,所述处理器设置在所述壳体内,用于进行数据处理;至少四个光电传感器,至少四个所述光电传感器均布在所述壳体上,所述光电传感器与所述处理器信号连接;声电传感器,所述声电传感器的数量与所述光电传感器的数量相对应,且所述声电传感器与所述光电传感器一一对应设置在所述壳体上,所述声电传感器与所述处理器信号连接;雷电发生时,各个所述光电传感器受雷电照射生成光电信号,所述光电传感器将所述光电信号传输到所述处理器中,所述处理器选取其中光电信号强度最大的光电传感器,将该光电传感器所在方位记为第一判断方位;各个所述声电传感器接收雷声生成声电信号,所述声电传感器将所述声电信号传输到所述处理器中,所述处理器选取其中声电信号生成时间最早的声电传感器,将该声电传感器所在方位记为第二判断方位;所述处理器将所述第一判断方位与所述第二判断方位进行比对,若所述第一判断方位与所述第二判断方位一致,则将所述第一判断方位作为雷电发生方位,且根据所述光电信号和所述声电信号参数计算与雷电发生位置的距离;若所述第一判断方位与所述第二判断方位不一致则重新获取下一组光电信号和声电信号进行判断。
5.优选地,所述光电传感器与所述声电传感器的数量均为八个,八个所述光电传感器围绕所述壳体的中心位置等角度间隔分布在所述壳体上。
6.优选地,所述光电传感器设置在所述壳体的侧面上,所述声电传感器设置在所述壳体的顶面上。
7.优选地,所述壳体的侧面形成有若干条向外突出的凸棱,所述凸棱的数量与所述
光电传感器的数量相对应,各个所述光电传感器分别设置在各条所述凸棱上。
8.优选地,所述雷电探测装置还包括:声光传感器,所述声光传感器设置在所述壳体的顶面的中心位置,所述声光传感器与所述处理器信号连接。
9.优选地,所述雷电探测装置还包括:方位传感器,所述方位传感器设置在所述壳体上,且与所述处理器信号连接,用于向所述处理器输入基准参考方位。
10.优选地,所述雷电探测装置还包括:温湿度传感器,所述温湿度传感器设置在所述壳体上,且与所述处理器信号连接, 用于感应环境温湿度;气压传感器,所述气压传感器设置在所述壳体上,且与所述处理器信号连接,用于感应环境气压。
11.优选地,所述雷电探测装置还包括:定位模块,所述定位模块设置在所述壳体上,且与所述处理器信号连接,用于获取定位信息。
12.优选地,所述雷电探测装置还包括:通信模块,所述通信模块设置在所述壳体上,且与所述处理器信号连接,用于进行外部通信。
13.优选地,所述壳体的底部设有用于安装固定的磁吸件。本公开所述的一种雷电探测装置,其优点在于:本公开通过多个声电传感器和多个光电传感器的规则排布,当雷电发生时,雷电照射使各个光电传感器生成光电信号,其中,所在方位最靠近雷电发生位置的光电传感器接收的为直射光线,光照幅度最强,其他方位的光电传感器接收的为侧射光线, 光照幅度较弱,此时处理器接收各个光电传感器的光电信号,选取其中光电信号强度最大的光电传感器,将该光电传感器的方位记为第一判断方位,此方位为光电信号判断中最靠近雷电发生位置的方位。声电传感器会接收雷电发生时的雷声并生成声电信号,由于各个声电传感器的排布方位不同,因而各个声电传感器接收到雷声并生成声电信号的时间点不同,所在方位最靠近雷电发生位置的声电传感器最先生成声电信号,其余的声电传感器生成声电信号的时间较晚,此时处理器接收各个声电传感器的声电信号,选取其中声电信号生成时间最早的声电传感器,即所在方位最接近雷电发生位置的声电传感器,处理器将该声电传感器所在方位记为第二判断方位。然后处理器再将第一判断方位与第二判断方位进行比对,如第一判断方位与第二判断方位一致,即光电传感器和声电传感器所分别捕捉到的光线和雷声均为雷电产生,没有其他外部因素干扰,则判断第一判断方位为雷电发生方位,然后再根据对应的光电传感器、声电传感器接收到的光信号和声信号的时间差,结合音速来计算雷电发生位置与探测装置所在位置的距离,这样就得到了雷电发生位置的方位和距离,完成雷电探测过程。如果第一判断方位与第二判断方位不一致,则说明光线和雷声的捕捉过程中可能存在外部因素干扰,此时继续捕捉下一组光电信号和声电信号,重复上述过程进行判断即可。本公开通过将光电传感器和声电传感器进行结合和规则排布,在对比雷电光线和雷声来源一致后确认雷电发生位置的方位,再计算雷电发生位置距离,整
体设计巧妙、结构简单、体积小、能耗低,可适用于轿车、公交车、轮船等交通工具中进行雷电探测,可有效降低或避免雷雨天交通工具雷击风险,提高安全性。同时采用声光来源比对验证的方式,可提高雷电探测方位的准确性,进而使得雷电探测结果更加准确。
附图说明
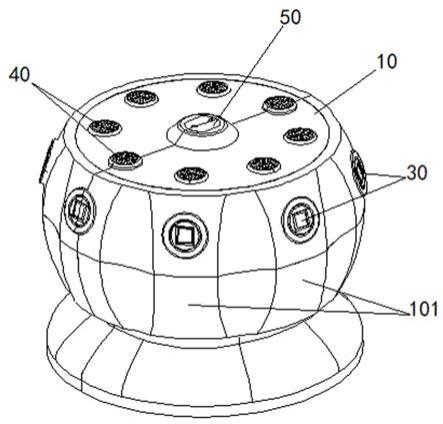
14.图 1 是本公开所述一种雷电探测装置的结构示意图;图 2 是本公开所述一种雷电探测装置的结构框图。
15.附图标记说明:10-壳体,101-凸棱,20-处理器,30-光电传感器,40-声电传感器,50-声光传感器,60-方位传感器,70-温湿度传感器,80-气压传感器,90-定位模块,100-通信模块。
具体实施方式
16.如图 1、图 2 所示,本公开所述的一种雷电探测装置,包括:壳体 10,壳体 10 通常为采用塑料或金属材质制成的圆柱形,内部形成有用于安装各个电路部件的安装腔,底部形成有一底座,以便于安装在车辆等交通工具的顶部。
17.处理器 20,处理器 20 设置在壳体 10 内,用于进行数据处理,处理器 20 可选用(microcontroller unit,微控制单元),用于对传感器信号进行处理运算。
18.至少四个光电传感器 30,至少四个光电传感器 30 均布在壳体 10 上,主要围绕壳体 10 的中心位置等角度间隔分别,在壳体 10 位置固定时,各个光电传感器 30 分别位于壳体 10 中心位置外侧的各个方位处,可对各个光电传感器 30 进行方位对应。
19.光电传感器 30 与处理器 20 信号连接,具体的,光电传感器 30 的输出端连接处理器20 的输入端,雷电光线照射时使光电传感器 30 感应生成光电信号,光电传感器 30将生成的光电信号输入到处理器 20 中。
20.声电传感器 40,声电传感器 40 的数量与光电传感器 30 的数量相对应,即数量相等,声电传感器 40 和光电传感器 30 一一对应设置在壳体 10 上,具体的,单个的声电传感器 40 和光电传感器 30 构成一组感应组件,同一组的声电传感器 40 与光电传感器 30 相对于壳体 10 中心位置的所在方位相同,即同一组的声电传感器 40 与光电传感器 30 的连线经过壳体 10 的中心位置。
21.进一步的,本实施例中,光电传感器 30 与声电传感器 40 的数量均为八个,八个光电传感器 30 围绕壳体 10 的中心位置等角度间隔分布在壳体 10 上,光电传感器 30
设置在壳体 10 的侧面上,声电传感器 40 设置在壳体 10 上。具体的,相邻两个光电传感器 30 的角度间隔为 45
°
,以壳体 10 的中心位置为坐标原点建立平面直角坐标系,其中,正东、正西、正南、正北分别对应 x 轴的正向、反向、y 轴的正向、反向, 根据方位定义余下四个光电传感器 30 分别为东南、西南、东北和西北,这样就将八个光电传感器 30 根据其所在方位一一对应起来了。声电传感器 40 的方位定义与光电传感器 30 相同。光电传感器 30 的数量选为八个,能表明八个方位,这样可以表明雷电发生位置相对于车主的大致方位,能满足雷电方位探测及后续路线规避的需求。光电传感器 30 设置在壳体 10 侧面上垂直于水平面可便于接收雷电光线,使光电传感器30 感应灵敏。
22.本公开的雷电探测装置的工作过程如下所述:以车载使用场景为例,将所述雷电探测装置安装于车辆顶部。雷电现象发生时, 雷电光线照射使各个光电传感器 30 生成光电信号,这一光电信号通常为电流,八个光电传感器 30 生成的光电信号依次记为 i1、i2、i3、i4、i5、i6、i7 和 i8,其所在方位分别为正东、东南、正南、西南、正西、西北、正北和东北。其中,所在方位最靠近雷电发生位置的光电传感器 30 接收的为直射或接近直射的光线,其光照幅度最强,所产生的光电信号强度(表现为电流大小)也最大。其他方位的光电传感器 30 所接收的为侧射光线或是位于雷电光线的背面,其光照幅度相对较弱,所产生的光电信号强度相对较小,选取光电信号强度最大的光电传感器 30,将该光电传感器 30 的方位记为第一判断方位。如,处理器 20 对比 i1、i2、i3、i4、i5、i6、i7 和 i8 的电流值, 其中 i3 为其中的最大值,则将 i3 所代表的正南记为第一判断方位,此方位为光信号判断中最靠近雷电发生位置的方位。
23.接着进行声电信号判断,传感器会接收雷电发生时的雷声并生成声电信号,这一声电信号通常也为电流。由于各个声电传感器 40 的排布方位不同,因而各个声电传感器 40 接收到雷声并生成声电信号的时间点不同,所在方位最靠近雷电发生位置的声电传感器 40 最先生成声电信号,其余的声电传感器 40 生成声电信号的时间较晚。具体的,八个声电传感器 40 接收到雷声生成声电信号的时刻依次记为 t1、t2、t3、t4、t5、t6、t7 和 t8,其所在方位分别为正东、东南、正南、西南、正西、西北、正北和东北,处理器 20 对比 t1、t2、t3、t4、t5、t6、t7 和 t8 的时刻,其中 t3 为最早的时刻, 则将 t3 所代表的正南记为第二判断方位。
24.然后处理器 20 再将第一判断方位与第二判断方位进行比对,如第一判断方位与第二判断方位一致(均为正南),即光电传感器 30 和声电传感器 40 所分别捕捉到的光线和雷声均为雷电产生,没有其他外部因素干扰,则判断正南为雷电发生方位。
25.处理器 20 继续计算雷电发生位置与探测装置所在位置的距离,具体计算方式为: 由于雷电光线以光速传播,所以其从发生位置传播到探测装置所在位置的时间可以忽略不急,将光电传感器 30 首次感应到雷电光线生成光电信号的时刻记为 ta,选取声电传感器 40 中最早接收到雷声生成声电信号的时刻,即上述 t3,则雷电发生
位置与探测装置的距离计算为:l=音速*(t3-ta);如,当 ta 与 t3 的时间差为 4s 时,则 l=340m/s*4s=1360m。
26.则雷电探测装置探测雷电发生位置为:正南方向 1360m,处理器 20 将该探测结果输出到手机、车载主机等智能终端,车主获取该探测结果后,可规划行车路线以避开雷电发生位置。
27.如果第一判断方位与第二判断方位不一致,则说明光线和雷声的捕捉过程中可能存在外部因素干扰,此时继续捕捉下一组光电信号和声电信号,重复上述过程进行判断即可。
28.本公开通过将光电传感器 30 和声电传感器 40 进行结合和规则排布,在对比雷电光线和雷声来源一致后确认雷电发生位置的方位,再计算雷电发生位置距离,整体设计巧妙、结构简单、体积小、能耗低,可适用于轿车、公交车、轮船等交通工具中进行雷电探测,可有效降低或避免雷雨天交通工具雷击风险,提高安全性。同时采用声光来源比对验证的方式,可提高雷电探测方位的准确性,进而使得雷电探测结果更加准确。
29.进一步的,本实施例中,壳体 10 的侧面形成有若干条向外突出的凸棱 101,凸棱 101 的数量与光电传感器 30 的数量相对应,如图示的八条,凸棱 101 突出在壳体10 的侧面之外,使相邻两个光电传感器 30 之间形成有一凹陷的槽。凸棱 101 结构主要考虑到在光电信号判断过程中,需要区别各个光电传感器 30 生成的光电信号电流大小,在实际试验过程中,相邻的两个光电传感器 30 有时出现光电信号电流非常接近的情况,这就不利于处理器 20 进行选取。为了解决这一技术问题,本实施例中通过在壳体 10 的侧面设置凸棱 101,将光电传感器 30 设置在凸棱 101 上,这样雷电光线直射入其中一个光电传感器 30,侧射光线会被相邻的凸棱 101 的侧面所遮挡,这样照射到相邻光电传感器 30 的光线强度就大幅减弱,可避免出现光电信号电流非常接近的情况,更便于处理器 20 的处理运算,且结构简单,易于实施。进一步的,本实施例中,所述雷电探测装置还包括:声光传感器 50,声光传感器 50 设置在壳体 10 顶面的中心位置,感应方向竖直向上,声光传感器 50 与处理器 20 信号连接。当雷电发生位置位于探测装置的正上方时,各个光电传感器 30 和各个声电传感器 40 的感应信号接近相同,此时位于侧面的各个光电传感器 30 接收的均为侧射光线,而位于顶部的声光传感器 50 接收的为直射光线,声光传感器 50 的光电信号电流明显大于光电传感器 30 的光电信号电流,此时处理器 20 判断雷电发生位置位于正上方。通过上述的方式可计算雷电发生位置
与探测装置的距离。声光传感器 50 主要用于探测发生于正上方的雷电现象。进一步的,本实施例中,所述雷电探测装置还包括:方位传感器 60,方位传感器 60 主要根据探测装置的移动、位置变换,实时向处理器 20 输入基准参考方位,以确保方位判断结果准确。
30.进一步的,本实施例中,所述雷电探测装置还包括:温湿度传感器 70,温湿度传感器 70 设置在壳体 10 上,且与处理器 20 信号连接,用于感应环境温湿度,温湿度传感器 70 选用常规的温度传感器和湿度传感器组合即可。
31.气压传感器 80,气压传感器 80 设置在壳体 10 上,且与处理器 20 信号连接,用于感应环境气压。
32.处理器 20 接收上述感应信号,获得所在环境的温度、湿度和气压,然后输入到常规的气象分析模型中,可以获得一个短时的气象预测结果输出给车主,车主可以根据该气象预测结果合理规划行车路线。
33.进一步的,本实施例中,所述雷电探测装置还包括:定位模块 90,定位模块 90 设置在壳体 10 上,且与处理器 20 信号连接,用于获取定位信息。定位模块 90 可以选用 gps 模块或北斗模块,主要用于实现定位功能。
34.进一步的,本实施例中,所述雷电探测装置还包括:通信模块 100,通信模块 100 设置在壳体 10 上,且与处理器 20 信号连接,用于进行外部通信,通信模块 100 可以选用 wifi 模块、蓝牙模块、4g 模块、5g 模块或其他常用的短距离通信模块 100,主要用于与手机、车载主机等智能终端通信,以将雷电探测结果等信息传输到智能终端中。
35.进一步的,本实施例中,壳体 10 的底部设有用于安装固定的磁吸件,磁吸件采用磁铁制成,用于吸附在交通工具,如车身上,磁铁吸附具有安装稳固、拆装方便的优点。
36.在本公开的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本公开保护范围的限制。
37.对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本公开权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
