1.本发明涉及磁环绕线技术领域,尤其是涉及一种全自动卡爪式多绕组磁环绕线机。
背景技术:
2.近些年来,电感技术在我国迅速发展,各类电感器产品也呈直线式上涨。但是,目前电感产品的质量、技术和国际先进水平相比,有明显的差距。其中,磁环电感绕线主要为两组线圈绕在磁环上,绕相同的匝数,现已不能满足电感行业的需要。若磁环增加线圈缠绕的组数,有利于提高电感的性能,现有的设备不能实现此类结构磁环的生产。
技术实现要素:
3.本发明的目的是提供一种全自动卡爪式多绕组磁环绕线机,可以实现自动上磁环、卡爪卡磁环、多绕组绕线、自动送线、自动取成品,从而实现连续不间断的生产方式。
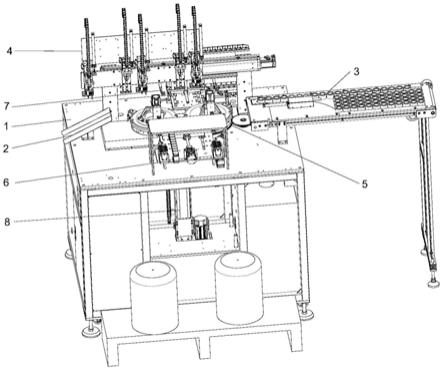
4.为实现上述目的,本发明提供了一种全自动卡爪式多绕组磁环绕线机,包括位于工作台上的上料机构、搬运机构、卡盘机构、送线机构和绕线机构,还包括位于工作台下方的钩线机构,所述上料机构位于工作台的一侧,所述搬运机构位于工作台的中部,所述送线机构和绕线机构分别位于搬运机构的两侧,所述钩线机构位于卡盘机构的下方,且中心位置对应设置;
5.所述搬运机构包括位于横梁上的若干组夹爪单元,所述夹爪单元通过第一滑座连接在横梁上,所述第一滑座的表面设有与夹爪单元连接的纵向导轨,所述夹爪单元的下方设有与卡盘机构中心对应的夹爪。
6.优选的,所述卡盘机构包括对称设置的卡座,所述卡座内侧的支撑架外侧设有位于同一圆上的压杆,所述卡座下方的齿条与外侧的齿轮连接,所述齿轮的下方设有第一电动机构,所述卡座外侧设有与压杆连接的第一气缸。
7.优选的,所述送线机构包括位于第一滑轨上的第二滑座,第二滑座上方的两侧设有过线轮,所述过线轮的前方均设有位于第二滑座上第四滑轨上的夹紧气缸,所述夹紧气缸上朝向卡盘机构的一侧设有水平导针,所述导针的外侧设有位置对应的剪线气缸。
8.优选的,所述绕线机构包括水平丝杠上方的第三滑座,所述第三滑座的第二滑轨上设有竖直的第四滑座,所述第四滑座外侧的竖直丝杠上设有活动架,所述活动架的前端设有转线轮,所述第四滑座的两侧设有与活动架连接的第三滑轨,所述竖直丝杠上方的第一轮与第四滑座外侧的第二轮连接,所述第二轮的下方设有第二电动机构。
9.优选的,所述钩线机构的立柱轨道上设有第五滑座,所述第五滑座两侧的悬臂上设有与卡座中心对应的钩针。
10.优选的,所述第一滑轨的下方设有安装架,所述钩线机构的底座四周设有调节螺柱。
11.优选的,所述工作台的另一侧设有与上料机构对应的出料板,所述出料板为向下
倾斜设置。
12.优选的,所述上料机构包括位于传送带上方一侧的限位板,所述限位板的入口侧设有与传送带另一侧的弧形导向板,所述传送带的出口处设有与限位板对应的档位板。
13.因此,本发明采用上述一种全自动卡爪式多绕组磁环绕线机,其中,上料机构安装在工作台的右侧,上料机构传送磁环至左端,由夹爪将磁环放入卡座里面;搬运机构的夹爪将磁环放入卡座里面,同时另一个夹爪将绕好的磁环,放入成品盒里;卡盘机构中磁环的卡位通过第一气缸下压,将卡位打开,待磁环放入后,第一气缸松开压力,磁环被固定,卡座通过电机带动齿轮转动,由齿轮转动完成磁环绕线;送线机构,放线引线装置放出的线利用过线轮导线后,再经过导针送线,再配合夹紧气缸进行线的固定和剪线气缸进行剪线;绕线机构,通过三个伺服电机带动滚珠丝杆移动,转线轮推动铜线随着卡座的转动来回的绕线;钩线机构,当搬运机构将磁环放入卡座内,送线机构将铜线送入磁环的上方,钩线装置从卡座的中心伸出,将铜线勾住向下运动,待钩线装置下降到一定位置时,剪线气缸带动装置将其剪断。此卡爪式三工位绕线机在绕线时,可以实现自动上磁环、卡爪卡磁环、可二、三、四等多绕组绕线、自动送线、自动取成品,可以实现连续不间断的生产方式。
14.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
15.图1是本发明一种全自动卡爪式多绕组磁环绕线机实施例的正视图;
16.图2是本发明一种全自动卡爪式多绕组磁环绕线机实施例的后视图;
17.图3是本发明一种全自动卡爪式多绕组磁环绕线机中上料机构实施例的示意图;
18.图4是本发明一种全自动卡爪式多绕组磁环绕线机中搬运机构实施例的示意图;
19.图5是本发明一种全自动卡爪式多绕组磁环绕线机中卡盘机构实施例的示意图;
20.图6是本发明一种全自动卡爪式多绕组磁环绕线机中送线机构实施例的示意图;
21.图7是本发明一种全自动卡爪式多绕组磁环绕线机中绕线机构实施例的示意图;
22.图8是本发明一种全自动卡爪式多绕组磁环绕线机中钩线机构实施例的示意图。
23.附图标记
24.1、工作台;2、出料板;
25.3、上料机构;31、限位板;32、导向板;33、档位板;
26.4、搬运机构;41、横梁;42、夹爪单元;43、第一滑座;44、纵向导轨;45、夹爪;
27.5、卡盘机构;51、卡座;52、支撑架;53、压杆;54、齿条;55、齿轮;56、第一电动机构;57、第一气缸;
28.6、送线机构;61、第一滑轨;62、第二滑座;63、过线轮;64、导针;65、夹紧气缸;66、剪线气缸;67、安装架;68、第四滑轨;
29.7、绕线机构;71、水平丝杠;72、第三滑座;73、第二滑轨;74、第四滑座;75、活动架;76、第三滑轨;77、竖直丝杠;78、第一轮;79、第二轮;80、转线轮;
30.8、钩线机构;81、第五滑座;82、钩针;83、底座;84、调节螺柱。
具体实施方式
31.以下通过附图和实施例对本发明的技术方案作进一步说明。
32.除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
33.如图所示,一种全自动卡爪式多绕组磁环绕线机,包括位于工作台1上的上料机构3、搬运机构4、卡盘机构5、送线机构6和绕线机构7,还包括位于工作台1下方的钩线机构8,磁环经过上料机构3上料后,再经过搬运机构4搬运到卡盘机构5的上方,送线机构6将铜线送到绕线机构7上,绕线机构7对磁环进行缠绕,同时,钩线机构8带动铜线上下移动,实现磁环上铜线的缠绕。工作台1的另一侧设有与上料机构3对应的出料板2,出料板2为向下倾斜设置,出料板2的设置便于磁环向外传送。
34.工作台1的外侧设有防护罩,防护罩上设有窗口,防护罩提高防护效果,减少事故的发生。同时,窗口的设置便于观察。防护罩为铝型材护罩,铝型材护罩为长方形。铝型材护罩是由铝型材和型材内置连接件连接而成,其目的在于铝型材架子的坚固性能和稳定的性能,铝型材防腐蚀效果好,其表面经过阳极氧化工艺处理后,会形成一层致密的氧化膜,耐腐蚀,不易生锈。
35.窗口是由铝型材和茶色有机玻璃板组装而成;工作台是由结构焊接件焊接而成,机箱四周装有门,并将整体烤漆。打开门窗可以让人看清楚设备的运行状态,设备四周开口,可以方便操作和观察设备里面各部分机构运行装态;工作台由方通焊接而成,再有钣金门板烤漆完成后,装在上面,其目的增加机架的稳定性,工作台旁边增加站台,方便操作人员站在站台上操作机器。
36.上料机构3位于工作台1的一侧,上料机构3包括位于传送带上方一侧的限位板31,磁环经过传送带向前输送。限位板31的入口侧设有与传送带另一侧的弧形导向板32,随着导向板32的作用,进入到限位板31,在限位板31的作用下有序向前推动。传送带的出口处设有与限位板31对应的档位板33,档位板33阻挡磁环继续运动,防止磁环脱出。
37.搬运机构4位于工作台1的中部,搬运机构4包括位于横梁41上的若干组夹爪单元42,夹爪单元42通过第一滑座43连接在横梁41上,第一滑座43在横梁41上往复移动,实现自传送带上夹取磁环或者将缠绕完后的磁环取下输入到下一工位。第一滑座43的表面设有与夹爪单元42连接的纵向导轨44,夹爪单元42在纵向导轨44上上下移动,实现不同位置夹取或者下放。夹爪单元42的下方设有与卡盘机构5中心对应的夹爪45,通过夹爪45实现磁环的抓取,夹爪45插入磁环中,实现磁环的位置固定。
38.卡盘机构5包括对称设置的卡座51,夹爪45将夹取的磁环放入卡座51中。卡座51内侧的支撑架52外侧设有位于同一圆上的压杆53,支撑架52为磁环进行限位,同时三面设置的压杆53保证磁环的稳定放置。卡座51外侧设有与压杆53连接的第一气缸57,在第一气缸57的作用下,压杆53压紧或放松磁环。卡座51下方的齿条54与外侧的齿轮55连接,齿轮55的下方设有第一电动机构56,在第一电动机构56的作用下,齿轮55通过齿条54带动卡座51转
动,便于磁环不同位置缠绕铜线。
39.送线机构6和绕线机构7分别位于搬运机构4的两侧,在搬运机构4的两侧,送线机构6提供铜线,绕线机构7带动铜线上下移动。钩线机构8位于卡盘机构5的下方,且中心位置对应设置,钩线机构8的钩针上下移动带动铜线上下缠绕。
40.送线机构6包括位于第一滑轨61上的第二滑座62,第二滑座62在第一滑轨61上移动,实现铜线的放线。第一滑轨61的下方设有安装架67,安装架67实现送线机构6位置的高低调整。第二滑座62上方的两侧设有过线轮63,过线轮63实现铜线的有序放线。过线轮63的前方均设有位于第二滑座62上第四滑轨68上的夹紧气缸65,夹紧气缸65在第四滑轨68上滑行。夹紧气缸65上朝向卡盘机构的一侧设有水平导针64,夹紧气缸65夹紧铜线后,通过自身的移动带动水平导针64移动。导针64的外侧设有位置对应的剪线气缸66,剪线气缸66上下移动实现铜线的切断。
41.绕线机构7包括水平丝杠71上方的第三滑座72,第三滑座72在水平丝杠71上往复运动。第三滑座72的第二滑轨73上设有竖直的第四滑座74,第四滑座74在第二滑轨73上下移动。第四滑座74外侧的竖直丝杠77上设有活动架75,活动架75在竖直丝杠77上下移动。通过第三滑座72、第四滑座74和竖直丝杠77实现x、y、z方向上的位置调整。活动架75的前端设有转线轮80,转线轮80实现铜线的缠绕。第四滑座74的两侧设有与活动架75连接的第三滑轨76,第三滑轨76保证活动架75的稳定运动。竖直丝杠77上方的第一轮78与第四滑座74外侧的第二轮79连接,第二轮79的下方设有第二电动机构,第二电动机构为第二轮79提供动力,第二轮79通过第一轮78带动竖直丝杠77转动,实现活动架75的上下移动。
42.钩线机构8的立柱轨道上设有第五滑座81,第五滑座81在立柱的轨道上下移动,实现铜线的上下绕动。第五滑座81两侧的悬臂上设有与卡座51中心对应的钩针82,钩针82实现铜线的钩取。钩线机构8的底座83四周设有调节螺柱84,调节螺柱84实现底座83高度的调节,适用于不同尺寸磁环的缠绕。
43.钩针通过弹簧固定在第五滑座上,第五滑座下面安装接近传感器,当钩针向下钩住铜线时,第五滑座远离接近传感器,反之,当钩针未钩住铜线时,报警警示。
44.因此,本发明采用上述一种全自动卡爪式多绕组磁环绕线机,可以实现自动上磁环、卡爪卡磁环、多绕组绕线、自动送线、自动取成品,从而实现连续不间断的生产方式。
45.最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。