1.本发明涉及一种用于泵送流体的系统以及该系统的实施方法。
2.更具体地,本发明涉及一种在片上实验室应用领域中用于泵送流体的系统。
技术背景
3.许多领域中都需要通过泵进行流体受控操作。例如,片上实验室领域中实施了此类受控操作。该领域在于将实验室功能微缩到芯片上。
4.为此,通常使用系统来泵送和控制在芯片内部循环的流体的流量和压力,以便能够实现各种功能,例如溶解粉末或使几种流体接触并对其混合,例如用于分析样品以测定相关物质。根据需要和现有解决方案,可以或多或少地对流体驱动系统进行集成。在某些情况下,泵送可以通过完全在芯片外部的系统来完成,例如通过带有注射器的推进-注射系统、常规蠕动泵系统、可以利用重力的高度差系统、或者甚至是向待注入流体施加气压的气压控制系统。这些系统需要使流体在芯片外部和内部之间通过,这要求在芯片和外部设备之间建立密封连接。
5.这带来了紧凑性、密封性、使用便捷性、无菌性、连接管中所含流体浪费、有时甚至由于连接管形变而导致的精度等问题。这就是为什么将与流体直接接触的泵送元件集成到芯片中是有用的,这些泵送元件可以将由于流体移动而产生的能量传递给流体,同时必要时能够使泵送系统的其他部分留在芯片之外。文献或工业中提出了大量的技术。毛细力可以通过控制芯片中通道的亲水特性来加以利用。由于这种技术是被动的,因此它无法从外部控制泵送,另外,它取决于所使用的流体。可以利用直接作用于液体的电动或磁动力,包括电渗力,但流量控制复杂,该力取决于所使用的流体,并且流体会受到化学影响并改性。离心力主要用于旋转芯片,但是随着芯片旋转,同时会使某些动作的执行变得复杂,例如测量或注入,另外泵送不能连续进行。
6.通过通道壁或芯片腔室的移动来驱动流体是最广泛使用的技术:常规地,这是通过气压或固体压力作用下的可形变壁或者是通过由固定压力致动的微型注射器中的滑动壁来实现的。然而,随着它们的使用,后几种系统需要在芯片中额外集成气动通道和支路,或者集成液体循环方向不可改变的被动阀,或者集成需要多个外部致动器以致动单个泵的主动阀,或者集成必须组装和密封的微型注射器。另外,通常需要通过芯片在致动器上的精确定位和精确机械支承来连接泵的集成部分与非集成部分,这限制了芯片的几何形状、材料和定位。
7.因此,目前在该领域中使用的泵系统无法同时兼具低集成和工业化成本、通用性、稳健性、精度和较大工作范围等诸多优点。因此,没有一种解决方案能够有效地解决片上实验室中流体泵送的问题,特别是在医疗诊断中,这需要一次性、低成本、精确、稳健的解决方案,能够产生超压或真空,并且使用简单可靠。
8.另外,需要说明的是,并非专门用于片上实验室的泵,现已存在并且利用磁性膜片的波动来形成能够移动的空腔,这种膜片只能通过施加方向和强度随位置和时间变化的力
来产生波状形变。然而,只有通过施加方向和/或梯度具有空间不均匀性并随时间变化的磁场,才能对没有不均匀磁性结构的膜片施加这些不均匀且渐进的力。这样不得不使用紧邻膜片设置的多个场源,这些场源的尺寸接近波动尺寸,通常很小(几毫米)。另外,这些场源必须是模块化的。通常,这些场源包括几个集成到载体上的小型电磁铁。然而,此类泵存在缺陷,尤其是与电磁体妨碍载体并在泵送液体附近因焦耳效应而发热的情况有关。另外,电磁体集成价格昂贵,并且波动尺寸在小型化方面受到限制。还需要与电源和控制电路接触的支路,以调制每个电磁体。这就是为什么此类泵不适于片上实验室。
技术实现要素:
9.为了解决前述的一个或多个缺陷,本发明的目的涉及一种用于泵送流体的系统,该系统包括:
[0010]-泵,包括:
[0011]
■
入口和出口,用于分别引入和抽取可以被泵送的流体,
[0012]
■
具有两个相对表面的柔性膜片,该膜片包括空间旋转永磁化结构,
[0013]
■
刚性载体装置,其上固定有膜片的至少一个所述表面的一部分,
[0014]-磁场源,能够在膜片所在位置处产生驱动磁场,所述驱动磁场具有基本均匀的取向,
[0015]
膜片可以在驱动磁场的作用下随着具有一个或多个凹部和一个或多个凸部交替的波动而发生形变,所述波动可以在驱动磁场的作用下移动,可以在入口和出口之间泵送的流体至少位于膜片的所述表面之一和载体装置之间。
[0016]
在本发明中,流体是指气体、液体或气体和/或液体的混合物。
[0017]
在本发明中,柔性膜片是指能够可逆弹性形变的膜片,并且其杨氏模量足够低以使施加在膜片中的磁应力引起膜片形变。杨氏模量例如可以在100kpa到1gpa之间。
[0018]
在本发明中,空间旋转永磁化结构是指由并置的基本区构成的磁化结构,这些基本区的旋转磁化强度沿预期波动的移动轴线变化。
[0019]
例如,为了理解,根据本发明,如果涉及“空间旋转永磁化结构”,则遵循以下规则:
[0020]
a.术语“基本区”被定义为膜片的一部分体积,尤其是膜片在其厚度和宽度上自由形变并产生波动的部分,并且其长度被限定为膜片厚度的两倍,
[0021]
b.将膜片划分成基本区zn,n是指观察者观察沿剖面pp切向水平放置的膜片时,从左到右看到的依次递增的连续基本区的编号,所述剖面pp也称为膜片的磁旋转平面,其下表面位于膜片的下侧,平面pp是垂直于膜片的平面并且包含对应于波动的预期移动轴的es轴(入口到出口),
[0022]
c.用an表示投影到平面pp上的基本区zn的平均磁化强度,
[0023]
d.用on表示an和a
n 1
之间[-π,π]范围内的方向角,
[0024]
e.如果满足以下两个条件,则认为永磁化结构是空间旋转的:
[0025]
i.对于任何n,on都是正的,或者对于任何n,on都是负的。顺便指出,下文中,在on为正的情况下,即膜片的空间旋转永磁化结构从左向右逆时针方向旋转的情况下,将上表面,即向上暴露的表面称为强表面,将下表面,即向下暴露的表面称为弱表面,而在on为负的情况下,即膜片的空间旋转永磁化结构从左向右顺时针方向旋转的情况下,将上表面称为弱
表面,将下表面称为强表面。
[0026]
ii.对于任何n,on o
n 1
的绝对值均小于5π/3
[0027]
iii.磁化至少进行一周,即所有n个on的总和至少为2*π
[0028]
下文中,将对应于进行一周磁化的膜片的任何部分称为“磁图”,即on的总和大于2*π的最小部分。因此将磁图在磁化旋转方向上的长度称为“磁图长度”,即膜片的磁化空间旋转周期。
[0029]
在本发明中,膜片的磁旋转平面是指垂直于膜片的旋转磁化的空间转轴的平面。
[0030]
膜片的可磁化特征是通过本领域技术人员已知的任何方式获得的。例如,这种特征来自于膜片制造过程中可磁化的磁性颗粒和柔性聚合物的混合物。膜片通过本领域技术人员已知的任何方法进行磁化,以形成旋转磁化结构。
[0031]
在本发明中,随时间旋转的驱动磁场是指其方向在空间中旋转的磁场,该旋转可以是连续的或不连续的。
[0032]
例如,为了理解,根据本发明,如果驱动磁场b是“随时间旋转的驱动磁场”,则遵循以下规则:
[0033]
a.术语“基本时间区”被定义使膜片可以显着动态变化的时间部分,当膜片受到应力变化时,使膜片从其初始形变变为平衡形变,
[0034]
b.将时间划分为时间基本区ztn,n是随时间变化的连续时间基本区的编号,
[0035]
c.用bn表示投影到平面pp上的ztn的平均磁场强度b,
[0036]
d.用obn表示[-π,π]范围内的方向角,其包括从bn和b
n 1
之间的夹角,
[0037]
e.如果满足以下两个条件,则认为驱动磁场是随时间旋转的:
[0038]
i.对于任何n,obn都是正的,或者对于任何n,obn都是负的。顺便指出,下文中,在obn为正的情况下,指b逆时针旋转,而在obn为负的情况下,指b顺时针旋转,
[0039]
ii.对于任何n,obn ob
n 1
的绝对值均小于π/2
[0040]
在本发明中,具有基本均匀取向的随时间旋转的驱动磁场是指,在膜片的磁图区域内,其取向离散度小于45
°
的磁场。
[0041]
另外,需要说明的是:
[0042]-如果驱动磁场逆时针方向旋转,并且膜片的强表面为上表面,那么波动将向右运动
[0043]-如果驱动磁场顺时针方向旋转,并且膜片的强表面为上表面,那么波动将向左运动
[0044]-如果驱动磁场逆时针方向旋转,并且膜片的强表面为下表面,那么波动将向左运动
[0045]-如果驱动磁场顺时针方向旋转,并且膜片的强表面为下表面,那么波动将向右运动。
[0046]
需要说明的是,流体因此有可能通过蠕动效应在入口和出口之间循环。
[0047]
根据本发明,mbt2/(eh2)的量应该大于0.01;其中m是膜片中的平均磁化强度(例如单位为a/m),b是膜片中源产生的磁场强度(例如单位为t),e是杨氏模量(例如单位为pa),h是膜片厚度(例如单位为m),t是膜片磁图的空间旋转周期(例如单位为m)。
[0048]
优选地,膜片中的平均磁化强度m可以在10ka/m到1000ka/m之间,有利地在100ka/
m到500ka/m之间,甚至更有利地在200ka/m到400ka/m之间。
[0049]
优选地,泵处的磁场强度b可以在10mt到1t之间,有利地在50mt到500mt之间,甚至更有利地在70mt到150mt之间。
[0050]
优选地,磁化结构可以被定义为空间旋转周期,在20μm到2cm之间,有利地在50μm到1cm之间,甚至更有利地在500μm到5mm之间,甚至更有利地在1mm到3mm之间。
[0051]
优选地,杨氏模量e可以在100kpa到1gpa之间,有利地在500kpa到500mpa之间,甚至更有利地在900kpa到5mpa之间。
[0052]
优选地,膜片的厚度可以在5μm到1cm之间、有利地在50μm到300μm之间、甚至更有利地在100μm到200μm之间。因此,泵的厚度减小,从而可以例如有效集成到任何芯片中。
[0053]
因此,利用根据本发明的系统,完全通过膜片来实现泵送功能,而无需使用一个或多个阀。另外,利用根据本发明的系统,通过不同腔室的形成和平移来确保泵送功能,这些腔室中的每一个都是通过施加随时间旋转的驱动磁场来形成的。泵送方向可以根据磁场的旋转方向来选择。另外,如果膜片的强弱表面方向相反,则位于同一旋转驱动磁场中的两个膜片将能够看到它们的波动沿相反方向移动。另外,只要该系统能够泵送液体和气体,则该系统就可以实现对气泡现象不敏感的泵送。利用根据本发明的系统,需要说明的是,可以通过仅调节旋转驱动磁场的速度和旋转方向来改变泵内流体的循环流量和方向。另外,本发明还具有一个优点是,不必通过焦耳效应来释放泵送液体附近的热量,这是因为一方面可以使用永磁体而不是电磁体来产生驱动场,另一方面,即使是电磁铁,也可以将其置于远离通道处以避免发热。
[0054]
优选地,驱动磁场在膜片的磁旋转平面上的投影可以随时间旋转。
[0055]
优选地,驱动磁场可以完全处于膜片的磁旋转平面内。
[0056]
优选地,至少一个或多个凸部能够与载体装置接触,并且至少一个或多个凹部能够不与载体装置接触,从而可以在膜片的其中一个所述表面与载体装置之间形成一个或多个腔室,这些腔室可以容纳流体,并且波动的移动可以使腔室移动并因此使入口和出口之间的流体移动。
[0057]
在本发明中,一个或多个凸部与载体装置接触,是指凸部的至少一个或多个顶点的一部分与载体装置接触。
[0058]
优选地,随时间旋转的驱动磁场还可以具有1t/m的最小梯度和基本均匀的梯度取向。
[0059]
优选地,随时间旋转的驱动磁场还可以具有1t/m的最小梯度和随时间恒定的梯度取向。
[0060]
优选地,当随时间旋转的驱动磁场具有1t/m的最小梯度、基本均匀的梯度取向和随时间恒定的梯度取向时,可以对膜片定位以使梯度定向为从弱表面到强表面,其中已知:
[0061]-当膜片的空间旋转永磁结构从左向右逆时针方向旋转时,强表面指向上暴露的表面,弱表面指向下暴露的表面,
[0062]-而当膜片的空间旋转永磁结构从左向右顺时针方向旋转时,强表面指向下暴露的表面,弱表面指向上暴露的表面。
[0063]
优选地,泵和磁场源可以不接触。因此,膜片和磁场源之间不需要任何硬件连接,这样可以远程致动泵:磁场源位于可以包括泵的芯片之外。
[0064]
优选地,膜片可以包含聚合物和磁性材料,磁性材料包含可以磁结构化的磁性颗粒。甚至更优选地,膜片可以是生物相容的。
[0065]
根据本发明系统的第一实施改型,该系统还可以包括刚性壁,该刚性壁固定到膜片的另一个所述表面的至少一部分周边上,并且与膜片隔开足够距离,以便波动并可以使凹部和壁相接触。这样的作用是增大作用力并且由于具有支承壁而增大载体装置对膜片的支承面积,改善对每个凸部中所含流体体积的控制,并且还可以保护膜片免于受到可能损坏膜片的潜在撞击或摩擦。
[0066]
根据本发明系统的第二改型,该系统可以包括刚性壁,该刚性壁固定到膜片的另一个所述表面的至少一部分周边上,并且与膜片隔开足够距离,以便波动并避免凹部和壁相接触。因此,除了第一改型中提到的作用以外,还可以在不与流体接触的膜片表面上施加设定的压力。
[0067]
在本发明中,固定到膜片的另一个所述表面的至少一部分周边上的刚性壁,是指膜片相对于刚性壁固定并与其直接或间接相连的另一个所述表面的至少一部分周边。
[0068]
优选地,壁可以包括孔口,通过该孔口在壁和膜片之间施加受控压力。因此,可以对不接触待泵送流体的膜片表面施加受控压力,从而避免损坏膜片或者甚至泵送流体,并且还加强载体装置对膜片的支承。
[0069]
优选地,膜片可以具有两个通孔,每个通孔位于其端部,以使可以泵送的流体还处于膜片的另一个所述表面与壁之间。因此,与不存在这两个通孔的情况相比,泵中的流体流动可能更快且更稳定,这时流体同时在凹部和凸部中循环。实际上,然后将泵设置成使得流体同时在膜片和载体装置之间以及膜片和壁之间循环,以提高泵中流体循环的流量和规律性。另外,由于流体在膜片两侧循环,因此泵仅受泵入口和出口压力的影响,而不受环境压力的影响。因此这改善了其流量和规律性。
[0070]
优选地,壁还可以包括第二入口和第二出口,以分别引入和抽取还处于膜片的另一个所述表面与壁之间的可以泵送的流体。可以在膜片的另一个表面和壁之间循环的流体与可以在膜片的其中一个所述表面和载体装置之间循环的流体可能是相同的,也可能是不同的。相同流体可以在膜片两侧循环的情况下,载体装置入口和壁的第二入口可以经由通道连接。载体装置的出口和壁的第二出口也是如此。因此,泵仅受泵入口和出口压力的影响,而不受环境压力的影响。因此这还改善了其流量和规律性。
[0071]
需要说明的是,载体装置和/或刚性壁可以是透明的,从而能够观察因波动形成的各个腔室和/或仅允许预期和设定的光线通过。
[0072]
还需要说明的是,载体装置和/或壁可以包括能够与流体直接接触的测量装置(例如传感器)和/或致动器。
[0073]
需要说明的是,根据本发明的系统还可以用于诸如压缩机、真空泵、电池中的电解质循环、冷却剂的驱动等领域。
[0074]
另外,本发明的另一个目的涉及一种实现上述系统的方法,该方法包括以下步骤:
[0075]
a)来自源的驱动磁场与膜片的永磁化结构之间相互作用,从而在膜片中产生应力,以使膜片随波动而发生静态形变,所述波动具有交替的一个或多个凹部和一个或多个凸部,
[0076]
b)驱动磁场旋转,从而使应力在膜片中移动,以使波动沿着根据驱动磁场旋转方
向设定的方向进行移动。
[0077]
c)流体在入口和出口之间移动,该流体至少包含由膜片和载体装置所界定的其中一个凹部中。
[0078]
优选地,旋转步骤b)可以通过永磁体旋转来实现。
[0079]
优选地,当随时间旋转的驱动磁场具有空间上基本均匀且恒定的梯度取向时,梯度可以从膜片的弱表面指向强表面。
[0080]
另外,需要说明的是,本发明具有诸多优点,能够解决片上实验室的问题,但不限于此。因此,许多其他应用都是可行的,例如电池中的电解质循环、流体产品(例如药品)的分配或计量、在容器中形成真空或超压(例如用于保存)、电路板上的冷却液循环。也可以将泵植入到人体等生物环境中以释放药物或抽取/输送流体。
[0081]
简要附图说明
[0082]
通过下文中仅作为示例给出的描述,并结合附图,将能够更好地理解本发明,其中:
[0083]
[图1]示出了根据本发明的一种实施方式的系统,
[0084]
[图2a]示出了根据本发明的一种实施方式的膜片,其包括空间旋转永磁化结构,
[0085]
[图2b]示出了根据本发明的一种实施方式的膜片,其包括空间永磁化结构,
[0086]
[图3a]示出了根据本发明的一种实施方式的膜片对驱动磁场的反应;
[0087]
[图3b]示出了根据本发明的一种实施方式的膜片对驱动磁场的反应;
[0088]
[图3c]示出了根据本发明的一种实施方式的膜片对驱动磁场的反应;
[0089]
[图4a]示出了根据本发明的第一实施方式的系统(以下称为第一系统)的俯视图;
[0090]
[图4b]示出了根据本发明的第一实施方式的系统在致动时的剖视图;
[0091]
[图4c]示出了根据本发明的第一实施方式的系统在致动时的剖视图;
[0092]
[图4d]示出了根据本发明的第一实施方式的系统在致动时的剖视图;
[0093]
[图4e]示出了根据本发明的第一实施方式的系统在致动时的剖视图;
[0094]
[图5]示出了根据本发明的第二实施方式的系统(以下称为第二系统)的剖视图;
[0095]
[图6]示出了根据本发明的第三实施方式的系统(以下称为第三系统)的剖视图;
[0096]
[图7]示出了根据本发明的第四实施方式的系统(以下称为第四系统)的剖视图;
[0097]
[图8]示出了根据本发明的第五实施方式的系统(以下称为第四系统)的剖视图;
[0098]
[图9]示出了根据本发明的第六实施方式的系统(以下称为第六系统)的剖视图;
[0099]
[图10]示出了根据本发明的第八实施方式的系统(以下称为第八系统)的剖视图。
[0100]
实施方式
[0101]
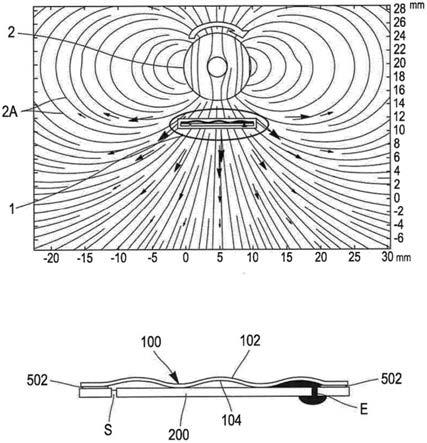
图1示出了根据本发明的一种实施方式的系统。这种系统包括:
[0102]-泵1,至少一种流体可以通过该泵在入口e和出口s之间循环,
[0103]-磁场源2,能够在膜片100中产生随时间旋转的驱动磁场2a,该磁场具有1t/m的最小梯度,以及在膜片100中的空间上基本均匀的梯度取向和随时间恒定的梯度取向,该源2例如是旋转永磁体,但也可以是本领域技术人员已知的任何源。
[0104]
在图1中可以观察到由源2产生的驱动磁场2a的磁力线。驱动磁场是位于泵1附近,具体是膜片100附近的局部源产生的,这种情况由于其实施简单性而非常有利。实际上,通常该驱动磁场的源2可以例如是一组电磁体或自转永磁体。
[0105]
图2a和2b至少部分地示出了膜片100的空间旋转永磁化结构。在这些图中,可以看到,膜片100中磁图的重复具有空间旋转周期t,从而使膜片100可以在磁场作用下波动。需要说明的是,该磁图仅作为示例给出,并且空间旋转周期t可能因预期应用而变化,从而产生更大或更小周期的波动。
[0106]
具体地,并且作为示例,为了定义图2中的空间旋转永磁化结构,图中给出了膜片100的磁图的示例:
[0107]
a.术语“基本区”被定义为膜片100的一部分体积,
[0108]
b.膜片100被划分成基本区zn,在图2a的示例中可以看到15个基本区,这些基本区是观察者观察膜片100时,按从左到右依次看到的递增顺序连续编号的(z0《zn《z
15
),平面pp是垂直于膜片100的平面并且包含连接泵1的入口e和出口s的轴线,该轴线对应于波动的预期移动轴的轴线,
[0109]
c.用an表示投影到平面pp上的特定基本区zn的平均磁化强度,
[0110]
d.用on表示an和a
n 1
之间[-π,π]范围内的方向角,
[0111]
e.永磁化结构是空间旋转的,这是因为对于任何n(0《n《15),如果on是正的,向膜片100上方暴露的表面是强表面10011,而向膜片100下方暴露的表面是弱表面10012,而对于任何n,on o
n 1
的绝对值约等于π/4,并且磁化至少进行一周,即一个空间旋转周期t的所有n个on的总和至少为2*π。
[0112]
图3a、3b和3c示出了图1中泵1的膜片100对施加在其上的驱动磁场2a的反应,该驱动磁场使得流体f的腔室在入口e和出口s之间经泵1循环。在这种配置中,如果驱动磁场顺时针方向旋转,则膜片100的强表面10011朝上,而波动向左移动。
[0113]
膜片100处的驱动磁场2a通常具有基本均匀且随时间恒定的梯度2b取向,该梯度2b的方向通常朝向源2。需要说明的是,梯度2b在膜片100中产生与梯度2b相关的磁力100b,等于fm=grad(m.b)。如果驱动磁场2a的梯度2b较大,则在膜片100形变中需考虑到该磁力100b。因此在解释膜片的形变时,不能再只考虑膜片100中产生的膜片100内的磁矩(cm=m x b)100a,图3a中的情况就是如此,还必须考虑到磁力100b fm(参见图3b和3c)。
[0114]
然而,来自梯度2b的该磁力100b的作用可能增大或不利于力矩100a cm引起的膜片100形变,这取决于梯度2b的方向是[弱表面10012]=》[强表面强10011](图3b)还是[强表面10011]=》[弱表面10012](图3c)。
[0115]
在第一种情况下,即方向为[弱表面10012]=》[强表面10011],磁力100b有利于力矩100a形变,如图3b所示的示例所示(膜片100 梯度2b),其中磁力100b fm如叠加在图3a中扭矩100a的形变上的箭头所示,其中fm带动膜片100的最高点朝向强表面10011(或向上),带动最低点朝向弱表面10012(或向下)。
[0116]
在第二种情况下,即方向为[强表面10011]=》[弱表面10012],磁力100b不利于力矩100a形变,如图3c所示的示例所示(膜片100 梯度2b),其中磁力100b fm如叠加在图3a中扭矩100a的形变上的箭头所示:其中fm带动膜片100的最高点朝向弱表面10012(或向下),带动最低点朝向强表面10011(或向上)。
[0117]
因此,即使在随时间旋转的驱动磁场2a也具有基本均匀的较大梯度2b并且取向恒定的情况下,通过将膜片100定向成使其强表面10011向强驱动磁场2a区暴露,即源2侧,可以使膜片保持适当形变。
[0118]
图4a、4b、4c、4d、4e示出了根据本发明的第一实施方式的第一系统的泵,该泵包括:
[0119]
■
入口e和出口s分别用于引入和抽取泵中的流体,
[0120]
■
柔性膜片100,具有上表面102和下表面104,该膜片100包括空间旋转永磁化结构,
[0121]
■
刚性载体装置200,其上固定有膜片100的下面表104的至少一部分周边。
[0122]
磁场源则在膜片100所在位置处产生驱动磁场。驱动磁场在膜片100的磁旋转平面上的投影具有基本均匀的取向并具有在磁平面pp内随时间旋转的分量,该驱动磁场可以随时间旋转。需要说明的是,驱动磁场也可以完全处于膜片100的磁旋转平面pp内。
[0123]
因此,驱动磁场和永磁化结构之间相互作用,从而在膜片100中产生应力,以使膜片100随波动发生静态形变,所述波动具有交替的一个或多个凹部和一个或多个凸部。因此,施加在膜片100上的驱动磁场旋转,可以使应力在膜片100中移动,以使波动沿着根据驱动磁场旋转方向设定的方向进行移动。
[0124]
根据本发明的系统的该第一实施方式的入口和出口是通过在载体装置200中形成孔、通过经由载体装置200渗透或者甚至通过引入设置在膜片100和载体装置200之间的通道来实现的。根据本发明的系统的其他实施方式也是如此。
[0125]
载体装置200可以促进膜片100的波动以输送流体。
[0126]
在该实施方式中,泵和磁场源不接触。因此,膜片100和磁场源之间不需要任何硬件连接,这样可以远程致动泵。
[0127]
例如,载体装置200可以包括玻璃、硅、pdms、pmma、cop、聚碳酸酯、聚酰亚胺、pvc或pe。
[0128]
需要说明的是,磁场源则可以产生附图所示的每个膜片100的波动。
[0129]
该磁场源可以是例如旋转圆柱形磁体或者包括置于泵附近但不与泵接触或连接的电线圈。该源还可以包括电磁体、非圆柱形磁体或海尔贝克圆柱形磁体、圆柱形磁体或未连接直流电机或一个或多个电线圈的磁体。
[0130]
需要说明的是,一部分凸部以及膜片100的下表面104的各部分,与载体装置200接触,以使一个或多个凹部包含一定体积的流体或流体腔室,波动时,该一定体积的流体可以在载体装置200上,在入口e和出口s之间移动。
[0131]
膜片100包括聚合物和磁性材料的混合物。例如,该混合物是例如pdms、胶乳或者硅胶等柔性聚合物与粒度为30μm的硬质磁材料粉末的均匀混合物,所述硬质磁材料粉末例如是ndfeb粉末或例如铁氧体粉末。另外,可以获得由生物材料构成的生物相容性膜片。
[0132]
例如,该膜片100可以按如下所述制造。混合物铺展并聚合,再根据例如其所放置的载体装置200的形状切割后,对所得膜片100磁化,使其具有空间旋转永磁化性,能够通过随时间旋转的驱动磁场对膜片100进行磁化,从而在膜片中引起波动。膜片100因此具有足够的柔韧性以便可以产生波动。
[0133]
例如,按如上所述制造的膜片100可以具有磁化结构,由约等于1.10-3
m的空间旋转周期t所确定,其杨氏模量e大约等于1.105pa,厚度h大约等于1.10-4
m。
[0134]
例如,膜片中的磁化强度m的平均值可以约等于1.105a/m,膜片100中的磁场源产生的磁场强度b可以约等于1.10-2
t。
[0135]
在这种配置中,mbt2/(eh2)的量等于1。
[0136]
因此,泵芯具体地位于空间旋转永磁化的柔性膜片100上。需要说明的是,由于波动的移动,可以通过泵蠕动地驱动流体。因此,在片上实验室领域中,这种低成本的膜片100可以在制造过程中轻松地直接放置在芯片中,并因此在与泵的电源分离的设备中运行。因此可以通过将泵放置在磁场源附近,轻松地利用刚性元件来致动泵。另外,泵可以植入到人体或生物介质中,而磁场源则可以位于外部。
[0137]
图4a示出了根据第一实施方式的系统中所包含的泵的俯视图。用于将膜片100的下表面104的周边固定到刚性载体装置200上的固定装置502可以是本领域技术人员已知的并且可以使泵具有密封性。
[0138]
图4b示出了泵在未对其施加任何磁场时的状态。
[0139]
图4c示出了泵在对其施加磁场时的状态。在图4c、4d、4e中可以看到,将需要输送至出口s的一定体积的流体连接到入口e。例如,施加到泵的入口e的压力可以约为1013hpa,出口s处的压力约为1063hpa,而膜片100外侧(与上表面102接触)的压力约为1013hpa。
[0140]
这种输送是利用波动的形成及其从入口e向出口s移动来实现的。因此,一定体积的流体通过入口e被引入泵中,并输送到连接入口e的凹部中,该凹部形成袋状,该袋是由呈波动的膜片100和载体装置200所界定的(图4c)。然后,在磁场旋转的作用下,波动从入口e移动到出口s,也使袋中一定体积的流体移动(图4d)。一旦第二凹部连接入口e,另一体积的流体被引入其中,使得若干体积的流体同时在载体装置200和膜片100之间移动(图4e)。需要说明的是,这些凹部或袋或腔室中的每一个都可以包含设定体积的流体,该体积在10nl到1ml之间,例如1μl,具体取决于泵1的几何特征。
[0141]
在根据第一实施方式的泵中循环的流体的流量因施加磁场而变化,尤其是因磁场的旋转速度而变化。磁场每旋转整个一周,波动就会移动磁图的一个空间旋转周期。
[0142]
参照图5,示出了根据本发明的第二实施方式的第二系统。
[0143]
相比第一实施方式的泵,该第二实施方式的泵的不同之处在于它还可以包括刚性壁300,该刚性壁固定到膜片100的上表面102的至少一部分周边上,并且与膜片100隔开足够距离,以便波动并可以使凹部和壁300相接触。该距离d可以在10μm到1cm之间。利用本领域技术人员已知的固定装置504将刚性壁300固定到膜片100的上表面102周边上,所述固定装置类似于用于将膜片100周边固定到载体装置200上的装置。
[0144]
另外,刚性壁300包括一个孔口302,但也可以包括多个孔口(图中未示出),通过孔口在壁300和膜片100之间施加受控压力。该压力例如是通过经孔口302引入气体或流体而产生的。
[0145]
参照图6,示出了根据本发明的第三实施方式的第三系统。
[0146]
根据的第三实施方式,泵包括刚性壁300,其固定到膜片100的上表面102的至少一部分周边上,并且不同于第二实施方式中的泵,与膜片100隔开足够距离,以便波动并避免凹部和壁300相接触。利用本领域技术人员已知的固定装置504将刚性壁300固定到膜片100的上表面102的周边上,所述固定装置类似于用于将膜片100的周边固定到载体装置200上的装置。距离d至少等于膜片100的厚度。在该实施方式中,膜片100不像第二个实施方式那样抵靠在壁300上,而是抵靠在通过孔口302引入膜片100和壁300之间的流体或气体上,该孔口对膜片100施加压力,并且可以调节压力。
[0147]
参照图7,示出了根据本发明的第四实施方式的第四系统。
[0148]
在该第四实施方式中,泵类似于第二实施方式,但包括具有两个通孔106和108的膜片100,每个通孔均位于其端部,而且壁300上没有孔。因此,相比没有这两个通孔106和108的情况,泵中的流体流动可能更快且更稳定,这时流体同时在凹部和凸部中循环。实际上,然后将泵设置成使得流体同时在膜片100和载体装置200之间以及膜片100和壁300之间循环,以使泵中流体循环的流量倍增。因此,在此,出口s处不会有断续的流体流量,这是因为一定量的流体体积同时包含在凹部和凸部中,所以出口s处的流量更加恒定。另外,该第四实施方式可以克服泵外压力的影响:只需考虑入口压力po和出口压力ps。另外,在一个腔室中获得的压力是通过前一个腔室的压力加上两个腔室之间的膜片部分产生的压力相加而获得的。因此,在泵的制造过程中,可以通过增加泵中的波动数量(并因此增加膜片100中的磁图)来增加泵的入口和泵的出口之间可能存在的压力差。
[0149]
另外,对于该实施方式以及其他实施方式,刚性载体装置200可以包括具有圆形侧边的通道(图中未示出),该通道连接入口e与出口s,以引导泵中流体在入口e和出口s之间循环。这样就保证了密封性。另外,通道的厚度为350μm。
[0150]
参照图8,示出了根据本发明的第五实施方式的第五系统。
[0151]
该第五系统包括具有多个入口e1、e2、e3以及单个出口s1的泵。因此该泵由具有多个部分的单个膜片组成,以下情况为三个部分:第一部分1001连接入口e1与点b,第二部分1002连接入口e2与点a,第三部分1003连接入口e3与点a,第四部分1004连接点a与点b,第五部分1005连接点b与出口s1。这些部件中每一个的磁图在点a和点b处是同相的,因此在交叉点a和b处正好形成单个腔室。另外,通道与这些部分1001、1002、1003、1004、1005中的每一个相连,以引导流体在这些部件中的每一个中流动。由这些不同部分构成的单个膜片形成一个整体。
[0152]
利用该第五系统,可以将不同的流体引入到入口e1、e2、e3的每一个中,在a点和b点对它们进行混合,并在出口s1收集混合物。
[0153]
在该第五系统中,引入到入口e1、e2、e3的每一个中的流体不断地分别积聚到第一部分1001、第二部分1002和第三部分1003的腔室中,而在之后或之前的其他腔室中没有泄漏。因此,来自两个不同部分的两个腔室,例如一个腔室来自第二部分1002而另一个腔室来自第三部分1003,可以在点a处合并成一个更大的腔室,并且这个更大的腔室可以在点b与第一部分1001的另一个腔室合并。
[0154]
需要说明的是,通过改变泵送流体的循环方向,入口e1、e2、e3可以变成出口,而出口s1可以变成入口。因此,可以通过划分出流体所在的腔室来划分引入的流体,而避免引入的不同流体相接触。
[0155]
参照图9,示出了根据本发明的第六实施方式的第六系统。
[0156]
第六系统类似于第二实施方式,但在载体装置200中还包括设置成与泵送流体直接接触的若干致动器或传感器410,以及测量装置420。
[0157]
例如,致动器410可以包括用于产生电化学反应的电极、热或超声波发生器、光源、传感器。例如,测量设备可以测量腔室中的参数。
[0158]
以这种方式,可以致动或分析包含在特定腔室中的单一预期体积的流体。
[0159]
参照图10,示出了根据本发明的第八实施方式的第八系统。
[0160]
第八实施方式类似于第四实施方式。在此,膜片100不含通孔。该第八实施方式的泵还包括刚性壁300,该刚性壁固定到膜片100的上表面102的至少一部分周边上,并且与膜片100隔开足够距离,以便波动,一种或多种流体经由泵循环的情况下,该波动引起或避免凹部和壁300相接触。载体装置200包括入口e'和出口s',并且刚性壁300也包括入口e"和出口s"。这样,一种流体可以在膜片100和载体装置200之间循环,而另一种流体可以在膜片100和壁300之间循环。因此,可以用同一个泵,以相同流量泵送两种不同的流体。
[0161]
另外,需要说明的是,通过这种实施方式,在入口e'和出口s'之间循环的流体也可以与在e”和出口s”之间循环的流体相同。在这种配置中,两个入口e'和e”可以通过通道相互连接,以便例如在膜片100两侧引入相同的流体,并且两个出口s'和s”通过另一个通道相互连接,以便抽取在膜片100两侧循环的同种流体。因此使泵中流体的循环速度加倍。
[0162]
需要说明的是,在上述每个实施方式中,刚性载体装置200可以是透明的,以便能够观察到因波动而形成的各个腔室。另外,壁300和/或载体装置200可以是透明的,从而仅允许预期和设定的光线通过。
[0163]
需要说明的是,在整个本技术中,当用f、cm、m、b、an形式的粗体字表示时,意味着涉及矢量。
[0164]
本发明已在附图和前文描述中进行了详细说明和描述。这应该被认为是说明性的并且是作为示例给出的,而不是将本发明仅限制于该描述。诸多实施改型都是可行的。
[0165]
在权利要求书中,“包括”一词不排除其他元件,不定冠词“un/une”(一个)不排除复数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。