1.本公开涉及照相机模块中的位置检测的串扰的修正方法、以及具备串扰修正功能的致动器驱动器。
背景技术:
2.近年来,在被搭载于智能手机等的照相机模块中,采用以下功能的模块正不断増加:通过对摄像透镜与图像传感器的相对位置(位移量)进行检测并反馈该位置信息,从而高精度且高速地对摄像透镜或图像传感器的位置进行控制。例如,能够通过采用反馈控制作为光学手抖修正(ois),从而进行高精度的手抖修正。此外,能够通过在自动对焦(af)功能中采用反馈控制,从而实现高速的对焦引入及焦点位置维持的高精度化。
3.作为在ois功能与af功能这两者采用反馈控制的照相机模块,公开了各种例子。例如,在专利文献1中,公开了为了af而驱动摄像透镜,为了ois而驱动整个af致动器的例子。在此,用于af的位置检测的检测磁铁被配置于af可动部,对磁的变化进行检测的霍尔元件被配置于固定部。
4.在专利文献1所记载的照相机模块中,因为用于af的位置检测的检测磁铁被配置于af可动部,霍尔元件被配置于固定部,所以af的检测磁铁也会因可动部伴随ois的位移而位移,因此,会产生af位置检测信号根据ois位移而变化的、所谓的串扰。作为该串扰的对策,提出了一种方案,其以如下方式进行串扰修正:将af位置检测磁铁设为圆柱形状,对相对于未进行手抖修正时的基准位置的x方向、y方向的位移进行半径换算并进行表示,抵消与该半径相应的af位置检测信号的误差。
5.[现有技术文献]
[0006]
[非专利文献]
[0007]
专利文献1:日本特开2019-120747号公报
技术实现要素:
[0008]
[发明要解决的课题]
[0009]
然而,能够使与半径相应的af的位置检测信号的误差公式化的,仅限于在基准位置处、位置检测磁铁的中心处于霍尔元件的感磁部的正上方的情况。然而,在实际的照相机模块中,由于各部件的尺寸公差、组装偏差等的影响,不保证位置检测磁铁的中心会处于霍尔元件的感磁部的正上方。
[0010]
当磁铁中心与霍尔元件的感磁部错开时,被检测的磁通密度不取决于半径,并会具有方向性,因此需要按照xy平面内的2维分布来进行修正,串扰修正会变得非常复杂。
[0011]
本公开鉴于上述状况而完成,其一个方案的例示性目的之一在于提供一种抑制了组装偏差等的影响的串扰的修正方法、以及具备这样的串扰修正功能的致动器驱动器。
[0012]
[用于解决技术课题的技术方案]
[0013]
本公开的一个方案的修正方法涉及一种照相机模块的修正方法。照相机模块包
括:可动部,其具有摄像透镜及磁铁;自动对焦用致动器,其在沿着光轴的z轴方向上对可动部进行定位;自动对焦用位置检测部件,其具有对磁铁所产生的磁性进行检测的磁性检测元件,并生成表示可动部的z轴方向的位置的位置检测信号;以及手抖修正用致动器,其在与摄像透镜的光轴方向垂直的平面内,沿正交的x轴方向及y轴方向对可动部进行定位。修正方法包括:用手抖修正用致动器来使可动部沿第1方向位移,对位置检测信号取峰值时的第1方向的位置进行检测的步骤、用手抖修正用致动器来使可动部沿第2方向位移,对位置检测信号取峰值时的第2方向的位置进行检测的步骤、保存基于第1方向的位置及第2方向的位置的基准位置的步骤、存储表示基于手抖修正用致动器的可动部自基准位置的位移量与位置检测信号的修正量的关系的修正信息的步骤、在手抖修正及自动对焦动作中,取得可动部自基准位置的位移量,并基于修正信息来生成该位移量所对应的修正量的步骤、以及利用修正量来对位置检测信号进行修正的步骤。
[0014]
本公开的另一方案涉及一种照相机模块用的致动器驱动器。照相机模块包括:可动部,其具有摄像透镜及磁铁;自动对焦用致动器,其在沿着光轴的z轴方向上对可动部进行定位;自动对焦用位置检测部件,其具有对磁铁所产生的磁性进行检测的磁性检测元件,并生成表示可动部的z轴方向的位置的位置检测信号;以及手抖修正用致动器,其在与摄像透镜的光轴方向垂直的平面内,在正交的x轴方向及y轴方向上对可动部进行定位。致动器驱动器包括:自动对焦用驱动部,其对自动对焦用致动器进行控制;手抖修正用驱动部,其对手抖修正用致动器进行控制;第1存储器,其保存基准位置;第2存储器,其保存修正信息;以及处理器。在校准工序中,使可动部沿第1方向位移,位置检测信号取峰值时的第1方向的位置被检测,在校准工序中,使可动部沿第2方向位移,位置检测信号取峰值时的第2方向的位置被检测,在校准工序中,基于第1方向的位置及第2方向的位置的基准位置被保存于第1存储器,在校准工序中,表示基于手抖修正用致动器的可动部自基准位置的位移量与位置检测信号的修正量的关系的修正信息被保存于第2存储器,处理器在手抖修正及自动对焦动作中,取得可动部自基准位置的位移量,基于修正信息来生成该位移量所对应的修正量,并利用修正量来对位置检测信号进行修正。
[0015]
本公开的一个方案涉及一种串扰修正方法。串扰修正方法为一种具备基于使摄像透镜位移的自动对焦功能和手抖修正功能,具有用于自动对焦的可动部的位置检测部件和用于手抖修正的可动部的位置检测部件,且用于自动对焦的位置检测部件由被配置于可动部的位置检测磁铁、以及被配置于固定部的磁性检测元件构成的照相机模块中的、位置检测信号的串扰修正方法,该串扰修正方法的特征在于,具有使可动部分别沿与摄像透镜的光轴垂直的2轴方向位移的进程、对基于上述位移的用于自动对焦的位置检测信号的峰值进行检测的进程、将检测到上述峰值时的用于手抖修正的位置检测信号值在2轴方向上分别存储的进程、以及将表示上述被存储的位置检测信号值的位置作为基准位置,预先设定并存储自上述基准位置的位移量与用于自动对焦的位置检测信号的变化的关系的进程,通过对手抖修正动作中的自上述基准位置的位移量进行检测,基于被存储的关系,根据上述位移量来算出用于自动对焦的位置检测信号的变化量,并从用于自动对焦的位置检测信号中减去上述变化量,从而进行串扰修正。
[0016]
根据该方案,即使在初始状态下,位置检测磁铁中心与霍尔元件的感磁部的位置错开的情况下,也能够探索在位置检测磁铁中心的延长线上存在霍尔元件的感磁部的条
件,并将其作为基准位置,对ois动作中的自基准位置的偏置量进行半径换算,从而对与半径相应的位置检测信号的误差进行修正,因此能够容易地实现串扰修正。
[0017]
此外,也可以是,在将自基准位置的位移量分别记为δx、δy时,通过r=√(δx2 δy2)来进行半径换算,并根据r的值来对用于自动对焦的位置检测信号进行修正。
[0018]
此外,也可以是,在将自基准位置的第1方向、上述第2方向的位移量分别记为δx、δy,并将au、av设为常数时,修正信息表示半径r与修正量的关系,其中半径r=√(auδx2 avδy2)。由此,能够在x方向与y方向上产生不同的串扰的情况下,正确地进行修正。
[0019]
由此,能够将位置偏置与位置检测信号的修正量的关系从2维转换为1维,因此用于串扰修正的修正系数的算出及修正的运算会变得容易。
[0020]
此外,也可以是,在使可动部分别沿与上述摄像透镜的光轴垂直的2轴方向位移的进程中,不进行用于自动对焦的反馈控制。
[0021]
据此,因为不会进行用于自动对焦的反馈控制,所以可动部在光轴方向上的位置基本是固定的,能够捕捉到使可动部沿垂直于光轴的方向位移时的af的位置检测信号的变化。
[0022]
此外,也可以是,在进行从用于自动对焦的位置检测信号中减去上述变化量的处理之前的阶段中,预先完成用于自动对焦的位置检测信号的线性修正。
[0023]
据此,与对不同的曲线间的错开进行修正相比,从设为直线的状态起进行修正的修正会变得容易。
[0024]
本公开的另一方案涉及一种致动器驱动器。致动器驱动器为一种具有用于实现上述串扰修正的功能的致动器驱动器,其特征在于,具有用于在使可动部沿与摄像透镜的光轴垂直的2轴方向位移时,存储用于自动对焦的位置检测信号表示峰值的用于手抖修正的位置检测信号值的存储器、用于存储自基准位置的位移量与用于自动对焦的位置检测信号的变化的关系的存储器、以及用于根据手抖修正动作中的自基准位置的位移量来算出用于自动对焦的位置检测信号的变化量,并且实施从用于自动对焦的位置检测信号中减去该变化量的处理的处理器。
[0025]
根据该方案,即使在具有用于实现串扰修正的存储器或处理器,且在初始状态下位置检测磁铁中心与霍尔元件的感磁部的位置错开的情况下,也能够探索在位置检测磁铁中心的延长线上存在霍尔元件的感磁部的条件,并将其作为基准位置,对ois动作中的自基准位置的偏置量进行半径换算,从而对与半径相应的位置检测信号的误差进行修正,因此能够提供一种可容易地实现串扰修正的致动器驱动器。
[0026]
另外,以上构成要素的任意组合、或者将本公开的构成要素或表达方式在方法、装置、系统等之间相互置换后的结果,作为本公开的方案也是有效的。
[0027]
进而,用于解决此问题的手段的记载并不对所有不可缺少的特征进行说明,因此被记载的这些特征的子组合也能够成为本公开。
[0028]
发明效果
[0029]
根据本公开,能够提供一种即使在初始状态(不进行手抖修正,没有电流施加的状态)下,位置检测磁铁中心与霍尔元件的感磁部的位置因组装偏差等而错开的情况下,也能够对自基准位置的偏置量进行半径换算,从而对与半径相应的位置检测信号的误差进行修正的串扰修正方法、以及具备这样的串扰修正功能的致动器驱动器。
附图说明
[0030]
图1是表示实施方式的照相机模块的图。
[0031]
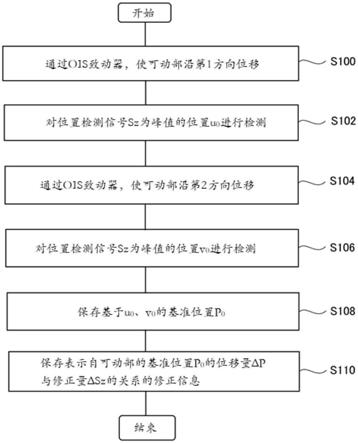
图2是实施方式的串扰修正的校准工序的流程图。
[0032]
图3是实施方式的串扰修正的实际动作工序的流程图。
[0033]
图4是表示实现实施方式的串扰修正的照相机模块的概略构成的中央剖视图。
[0034]
图5是表示在图4的照相机模块中,af位置检测磁铁与霍尔元件的关系的立体图。
[0035]
图6是表示在图4的照相机模块中,af位置检测磁铁与霍尔元件的位置关系及霍尔元件位置处的磁通密度分布的例子的侧视图。
[0036]
图7是表示在xy平面内对可动部进行扫描时的磁通密度分布的变化情况的图。
[0037]
图8是表示实施方式的串扰修正的顺序的流程图。
[0038]
图9是表示实现实施方式的串扰修正的致动器驱动器的构成例的框图。
[0039]
图10的(a)~图10的(c)是表示实施了线性修正和串扰修正时的位置检测信号的变化的图。
[0040]
图11是用于说明线性修正的顺序的图。
具体实施方式
[0041]
以下,参照附图,基于优选的实施方式来对本公开进行说明。对于各附图所示的相同或等同的构成要素、构件、以及处理,标注相同的附图标记,并适当省略重复的说明。此外,实施方式并不对公开进行限定,仅为例示,实施方式所记述的一切特征或其组合不一定是公开的实质性内容。
[0042]
在本说明书中,所谓“构件a与构件b连接的状态”,除包含构件a与构件b物理性地直接连接的情况之外,还包含构件a与构件b经由不对其电连接状态产生实质影响,或者不会损害其耦合所起到的功能或效果的其它构件间接地连接的情况。
[0043]
同样,所谓“构件c被设置于构件a与构件b之间的状态”,除包含构件a与构件c,或者构件b与构件c直接连接的情况之外,还包含经由不对其电连接状态产生实质影响,或者不会损害通过其耦合而起到的功能或效果的其它构件间接地连接的情况。
[0044]
图1是表示实施方式的照相机模块100的图。照相机模块100包括图像传感器102、控制器104、可动部110、af位置检测部件120、af致动器130、ois位置检测部件140、以及ois致动器150。
[0045]
图像传感器102为cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)传感器或ccd(charge coupled device:电荷耦合器件)。
[0046]
可动部110包括摄像透镜112及位置检测用的磁铁114。摄像透镜112被设置于比图像传感器102靠被摄体侧。取摄像透镜112的光轴方向为z轴,并在与其正交的平面取x轴及y轴。通过使可动部110沿z轴方向位移,从而能够控制摄像透镜112与图像传感器102的距离,并使被摄体的像成像在图像传感器102上(af动作)。此外,能够通过使可动部110沿x轴方向及y轴方向来修正手抖(ois动作)。
[0047]
磁铁114为具有以光轴为高度方向的圆柱形状,并被沿高度方向磁化的永久磁铁。af位置检测部件120包含霍尔元件等磁性传感器,对磁铁114所产生的磁场h(或磁通密度b)进行检测,并生成与磁场h相应的位置检测信号sz。位置检测信号sz根据磁铁114与af位置
检测部件120的距离,即可动部110的z轴方向的位置来变化。
[0048]
控制器104对可动部110(摄像透镜112)的z方向的位置进行控制,以进行对焦。af致动器130为包含线圈和永久磁铁的音圈电机。af致动器130接收来自控制器104的位置指令sz
(ref)
,对流过线圈的电流进行调节,并通过反馈控制来将可动部110沿z轴方向定位,使得位置检测信号sz所示的位置z靠近位置指令sz
(ref)
所示的目标位置z
ref
。
[0049]
ois位置检测部件140包含霍尔元件等磁性传感器,生成与可动部110的x轴方向及y轴方向的位置相应的位置检测信号sx、sy。
[0050]
ois致动器150在与摄像透镜112的光轴方向垂直的平面内,将可动部110沿x轴方向及y轴方向定位,以抑制手抖。例如,控制器104包含陀螺仪传感器,该陀螺仪传感器对照相机模块100的围绕俯仰轴及围绕横摆轴的旋转进行检测。通过对陀螺仪传感器的输出进行积分,并将其转换为角度信息,从而能够生成x轴及y轴的位置指令sx
(ref)
及sy
(ref)
。
[0051]
ois致动器150与af致动器130同样,为包含线圈和永久磁铁的音圈电机。ois致动器150对流过线圈的电流进行调节,并通过反馈控制来将可动部110沿x轴方向及y轴方向定位,使得位置检测信号sx、sy所示的当前的可动部110的位置x、y靠近位置指令sx
(ref)
、sy
(ref)
所示的目标位置x
ref
、y
ref
。
[0052]
以上是照相机模块100的基本构成。在该照相机模块100中,af位置检测部件120所生成的位置检测信号sz在理想情况下,仅取决于可动部110的z方向的位置,而不应取决于x方向及y方向的位置,但实际上,在可动部110在x-y平面内移动时,入射到af位置检测部件120的磁场h会变化。将其称为串扰。
[0053]
接着,针对串扰修正进行说明。串扰修正包含校准工序、以及基于在校准工序中得到的修正信息来修正位置信息的实际动作工序。
[0054]
图2是实施方式的串扰修正的校准工序的流程图。首先,用手抖修正用致动器使可动部110沿第1方向(u轴方向)位移(s100),并对位置检测信号sz取峰值时的第1方向的位置u0进行检测(s102)。
[0055]
同样,用手抖修正用致动器来使可动部110沿第2方向(v轴方向)位移(s104),并对位置检测信号sz取峰值时的第2方向的位置v0进行检测(s106)。u轴及v轴既可以与x轴及y轴一致,也可以不一致。
[0056]
然后,保存基于第1方向的位置u0及第2方向的位置v0的基准位置p0(s108)。
[0057]
然后,存储修正信息,该修正信息表示手抖修正用致动器150所导致的自可动部110的基准位置p0的位移量δp与位置检测信号sz的修正量δsz的关系(s110)。位移量δp为第1方向的位移量δu与第2方向的位移量δv的组合。
[0058]
图3是实施方式的串扰修正的实际动作工序的流程图。在手抖修正及自动对焦动作中,自可动部110的基准位置p0的位移量δp被取得(s120)。然后,基于修正信息,生成与该位移量δp对应的修正量δsz(s122)。然后,利用修正量δsz来修正位置检测信号sz(s124)。
[0059]
以上是照相机模块100中的串扰修正。本公开可理解为图1的框图或图2、图3的流程图,或者涉及从上述说明中导出的各种装置、方法,并不被限定于特定的构成。以下,并非为了缩小本公开的范围,而是为了有助公开的实质及动作的理解,并使它们明确化,对更具体的构成例及实施例进行说明。
[0060]
图4是表示实现实施方式的串扰修正的照相机模块的概略构成的中央剖视图。
[0061]
照相机模块1被内置于数码相机或数码摄像机、智能手机或平板终端,并被利用于照片或视频拍摄。照相机模块1具有af功能和ois功能,分别包括可动部的位置检测部件,并能够进行反馈控制。位置检测部件由磁铁和霍尔元件构成。也可以不使用霍尔元件,而是使用mr元件、gmr元件那样的磁阻元件。ois用的位置检测用磁铁兼作驱动用的磁铁,而针对af用,与驱动用不同地,设置有位置检测用的磁铁。
[0062]
如图4所示,照相机模块1包含af致动器3,其用于将摄像透镜2沿光轴方向定位;以及ois致动器4,其用于将整个af致动器在垂直于光轴的面内定位。
[0063]
摄像透镜2被收纳于透镜筒5内。摄像透镜2在图中显示为3个,但也可以为4个以上,还可以为2个以下。透镜筒5被定位并搭载于透镜支架6内。透镜支架6被上下2片af弹簧7a、7b相对于磁铁支架8而沿光轴方向可动地支撑。磁铁支架8被4根悬挂线9相对于作为固定部的基座10而沿垂直于光轴的方向(图的x轴方向及y轴方向)可动地支撑。此外,罩11被以覆盖整个af致动器3、ois致动器4的方式设置在基座10上。
[0064]
ois驱动磁铁12被搭载于磁铁支架8,与其相对地,ois线圈13被固定在基座10上。同样,与ois驱动磁铁12相对地,在基座10固定有ois霍尔元件14。即,ois驱动磁铁12也兼作ois位置检测的目的。图示的ois驱动磁铁12、ois线圈13、ois霍尔元件14为图的y轴用,在旋转90度的边,存在未图示的x轴用的ois驱动磁铁、ois线圈及ois霍尔元件。另一方面,在相对于图示的ois驱动磁铁12等为相反侧的边,设置有af位置检测部件。具体而言,af位置检测磁铁15被搭载于透镜支架6,与其相对地,在基座10固定有af霍尔元件16。图示的af位置检测磁铁15为位置检测用途专用,不被使用于驱动。af的驱动用磁铁和线圈,即af致动器3存在于旋转了90度的未图示的边。af的驱动用磁铁也可以兼作ois的x轴用的驱动用磁铁。ois霍尔元件14对磁铁支架8的垂直于光轴的方向(在图中,为y轴方向)的位移进行检测,af霍尔元件16对透镜支架6的光轴方向(在图中,为z轴方向)的位移进行检测。
[0065]
像以上那样,af用的位置检测磁铁被搭载于af可动部,af用的霍尔元件被搭载于作为固定部的基座。af可动部为了af动作而沿光轴方向可动,并且在ois动作时也会沿垂直于光轴的方向位移。因此,af的位置检测信号会因ois动作而受到影响,产生所谓的串扰。当存在串扰时,会生成虚假的位置检测信号,因此优选极力除去串扰的影响。
[0066]
图像传感器17被安装于模块基板18,并且由传感器罩19覆盖。基座10被搭载在传感器罩19上。在传感器罩19的中央部具有开口,开口由ir截止玻璃20盖住。柔性印刷电路(fpc)21被设置为af致动器3、ois致动器4的线圈及霍尔元件的通电路径,并被连接于模块基板18。在模块基板18,安装有致动器驱动器22,其对af致动器3、ois致动器4的位置检测信号进行处理,对串扰进行修正,从而向线圈供给适当的驱动电流。
[0067]
接着,针对af位置检测磁铁15与af霍尔元件16的关系,用图5、图6来详细说明。图5是表示在图4的照相机模块中,af位置检测磁铁15与霍尔元件16的关系的立体图。图6是表示在图4的照相机模块中,af位置检测磁铁15与霍尔元件16的位置关系及霍尔元件位置处的磁通密度分布的例子的侧视图。
[0068]
如图5所示,af位置检测磁铁15具有圆柱形状。当假定在圆柱的中心轴的延长线上存在af霍尔元件16的感磁部16a时,以该位置关系为基准位置p0,将自基准位置p0的位移δp(af位置检测磁铁15沿x轴、y轴方向运动)换算为半径r,从而能够像图6那样导入半径r与磁
通密度b的关系的图表23。在此,因为将af位置检测磁铁15的磁极设定为n极向下,所以将磁通密度b的坐标轴设定为向下。图表23在af位置检测磁铁15相对于af霍尔元件16而沿垂直于光轴的方向位移时,表示位移量r与磁通密度b的关系。图表23相对于r=0的原点(即基准位置)为旋转对称形状,随着r变大,磁通密度会变小。这是因为af位置检测磁铁15的磁通密度分布成为了那样,所以在中心轴上磁通密度最大。表示该关系的图表23大致示出2次函数,因此优选将b作为r的2次函数来预先进行函数近似。
[0069]
可是,在初始状态(例如,不进行ois的抖动修正,且电流施加为0时)下,在如图5中以虚线所示,中心轴为偏心的圆柱磁铁15a的情况下,当将该状态作为基准位置时,即使对自基准位置的位移进行了半径换算,在半径r中,也无法唯一地表示磁通密度的变化,需要进行非常复杂的串扰修正。因此,需要在串扰修正的前一阶段,首先找到圆柱磁铁的中心轴会来到霍尔元件的感磁部上那样的位置,以该位置为基准位置,对自基准位置的位移量进行半径换算,并预先掌握半径r与霍尔元件的感磁部中的磁通密度的关系。
[0070]
另外,磁铁15a能够生成旋转对称的磁通密度分布即可,其形状不被限定于圆柱。例如,即使为长方体的磁铁,自其的距离较远的区域的磁通密度分布实质上也能够视为旋转对称。或者,也可以是,使用非圆柱的磁铁,对其周围下使磁通密度分布旋转对称那样的工夫。例如,也可以是,将圆柱型的磁性体(背轭)连接于长方体的磁铁,并使磁通密度分布旋转对称。
[0071]
接着,针对找到理想的基准位置p0的方法,用图7进行说明。图7是表示在xy平面内扫描可动部时的磁通密度分布的变化情况的图。该进程优选在出厂时或照相机起动时的校准中执行,并预先存储表示基准位置p0的ois霍尔信号值。
[0072]
首先,通过ois致动器4来对可动部沿第1方向进行扫描。在此,沿x轴方向取第1方向,并沿x轴方向进行扫描。例如,将y轴方向驱动的电流设为0,使x轴方向驱动的电流变化即可。此时,不知道在af位置检测磁铁15的y轴上的哪个位置的延长线上存在af霍尔元件16的感磁部16a。像磁通密度的变化的图表23a~23e的那样,磁通密度的变化的大小会根据感磁部16a的位置而改变,但表示峰值的位置为x=0的位置。即,即使对y坐标的哪个位置进行了扫描,表示磁通密度的峰值的位置也为x=0,此时的ois位置检测信号值hx为基准位置的x坐标,因此会预先存储其值h
0x
。接着,针对第2方向,也进行同样的处理。在此,沿y轴方向取第2方向,沿y轴方向对可动部进行扫描,从而将表示磁通密度的峰值的位置设为y=0,并将此时的y轴的ois位置检测信号值hy的值h
0y
预先作为基准位置而存储。另外,x轴和y轴的扫描顺序也可以相反。如此,为了成为表示基准位置p0的ois位置检测信号值h
0x
、h
0y
,会对ois致动器施加恒定的电流。
[0073]
如上,当发现基准位置p0的ois位置检测信号值h
0x
、h
0y
时,其成为x轴、y轴的坐标值。当预先掌握自基准位置p0的位移量r(=δp)与磁通密度的变化的关系,并按照其关系式进行修正,使得即使沿x轴、y轴方向位移,磁通密度的检测结果,即af位置检测信号值也不会变化时,af位置检测信号会仅根据af的位移而变化,串扰会被修正。自基准位置的位移量基于ois的位置检测信号hx、hy,按照
[0074]
δhx=hx-h
0x
[0075]
δhy=hy-h
0y
[0076]
来算出,因此会成为x轴、y轴的2维的值δx、δy,但因为基准位置在圆柱磁铁的中
心线上,所以可按照
[0077]
r=√(δx2 δy2)
[0078]
来进行半径换算,位移量能够以r这样的1维的值来表示。另外,实际上,无需以距离的维度来表示位移量,将全部换算在霍尔元件的位置检测值(或其数字代码值)中执行即可。
[0079]
r=√(δhx2 δhy2)
[0080]
接着,按照图8的流程图,对整个串扰修正的流程进行说明。图8是表示实施方式的串扰修正的顺序的流程图。另外,流程图中的进程31~36应在出厂时或照相机起动时的校准中,事先预先执行,进程37~39应在自动对焦动作或手抖修正动作中执行。
[0081]
首先,如也在图7中说明的那样,沿x轴方向对可动部进行扫描(进程31)。此时,对af的霍尔信号表示峰值的x方向的位置的霍尔信号h
0x
进行存储(进程32)。同样,沿y轴方向对可动部进行扫描(进程33)。此时,对af的霍尔信号表示峰值的y方向的位置的霍尔信号h
0y
进行存储(进程34)。由此,因为基准位置p0的坐标值(霍尔信号值h
0x
、h
0y
)被存储,所以接着会掌握自基准位置p0的位移量与af霍尔信号值sz的变化的关系。将自x方向、y方向的基准位置的位移以ois霍尔信号来表示,并将其分别记为δh
x
、δhy,通过
[0082]
r=√(δh
x2
δh
y2
)
[0083]
来进行半径换算(进程35)。然后,一边使r变化,一边对与此时的af霍尔信号值sz的变化的关系进行测定,并预先将两者的关系函数化(进程36)。另外,在对af霍尔信号的变化进行测定时,不进行af的反馈控制。当进行反馈控制时,af可动部会沿光轴方向位移,以使af的位置检测信号恒定,即使进行ois位移,af的位置检测信号也不会变化,无法导出关系式。在对af霍尔信号的变化进行测定时,优选不对af致动器施加电流或预先施加恒定的电流。
[0084]
在进程36中,也可以是,在磁通密度b针对基准位置p0而为完全的旋转对称的情况下,通过将δh
x
、δhy中的一者固定为零并使另一者变化,从而使r变化,并对r与af霍尔信号值sz的关系进行测定。
[0085]
接着,针对实际的af、ois动作中的处理进行说明。ois可动部因手抖修正动作而位移,ois位置检测信号也因其而变化。求得从基准位置的位置检测信号起的变化量δh
x
、δhy,进行半径换算,从而将位移量记为r并算出(进程37)。接着,按照在进程36中设定的函数,算出求得的r所对应的af的位置检测信号的修正值(串扰修正值)(进程38)。最后,按照串扰修正值,对af的霍尔信号值进行修正(进程39)。通过以上的进程,能够对ois位移所导致的对af位置检测信号的串扰进行修正。
[0086]
接着,针对具有上述串扰修正功能的致动器驱动器进行说明。图9是表示实现实施方式的串扰修正的致动器驱动器40(22)的构成例的框图。致动器驱动器40为将af用(z轴)驱动部、ois用的x轴、y轴用的驱动部42、44、46集成化得到的ic。
[0087]
驱动部42、44、46分别被构成为能够对对应的致动器60、62、64进行反馈控制。驱动部42、44、46被同样地构成。
[0088]
位置检测元件51x、51y、51z为霍尔元件(在图4中,相当于14、16),产生与致动器的可动部的位移相应的霍尔电压v
、v
-
,并将其供给到致动器驱动器40的霍尔检测管脚(hp、hn)。用于控制的目标信息被从致动器驱动器的外部供给。在af的情况下,基于相衬法来对
基于图像传感器的焦点偏置信息进行检测,并通过cpu52将其作为目标信息而带到致动器驱动器。在ois的情况下,来自陀螺仪传感器53的信号作为手抖信号而被带到致动器驱动器。因为在陀螺仪传感器53中检测的是手抖的角速度,所以优选在致动器驱动器内对其进行积分,并将其转换为角度信息。
[0089]
位置检测部510基于霍尔电压v
、v
-
而生成表示致动器的可动部的位置(位移)的数字的位置检测值p
fb
。位置检测部510包含:霍尔放大器512,其对霍尔电压进行放大;以及a/d转换器514,其将霍尔放大器512的输出转换为数字值的位置检测值p
fb
。
[0090]
在需要温度修正的情况下,会利用温度检测部520。温度检测部520生成表示温度的温度检测值t。关于温度,优选表示位置检测元件51的温度,因此也会将位置检测元件51即霍尔元件作为温度检测用来利用。这利用了霍尔元件的内部电阻r具有温度依赖性的情况。温度检测部520对霍尔元件的内部电阻r进行测定,并将其作为表示温度的信息来利用。温度检测部520包含恒流电路522和a/d转换器524。恒流电路522向霍尔元件供给预定的偏置电流i
bias
。该偏置电流i
bias
也为使霍尔元件动作所需的电源信号,因此恒流电路522能够视为霍尔偏置电路。
[0091]
在霍尔元件的两端间,会产生电压降i
bias
×
r。该电压降被输入到霍尔偏置管脚(hb)。a/d转换器524将hb管脚的电压v
hb
(=i
bias
×
r)转换为数字值t。因为偏置电流i
bias
为已知且恒定的,所以数字值t为与内部电阻r成比例的信号,因此,包含霍尔元件的温度的信息。内部电阻r与温度的关系事先被测定、函数化,并被表格化,在后级的修正部530中,数字值t被转换为温度信息。
[0092]
af的接口电路540从cpu52接收表示致动器的可动部的目标位置的目标代码tc。ois的接口电路541从抖动检测部件53即陀螺仪传感器接收俯仰角速度ω
p
、横摆角速度ωy。例如也可以是,接口电路540、541为i2c(inter ic:内部集成电路)等串行接口。af用滤波器550对接口电路540所接收到的目标代码tc进行过滤,并生成位置指令值p
ref
。当位置指令值p
ref
急剧地变化时,会存在可动部的位置振铃的风险。该振铃会被滤波器550抑制。ois用滤波器551也可以为陀螺仪dsp。陀螺仪dsp551对接口电路541所接收到的角速度信号ω
p
、ωy进行积分,生成位置指令值p
ref
。
[0093]
修正部530对来自位置检测部510的位置检测值p
fb
进行修正。具体而言,修正部530包含线性补偿部532、温度补偿部534及存储器536。线性补偿部532对位置检测值p
fb
与实际的位移的关系的直线性进行修正。在存储器536,存储有用于修正的函数及各种参数等。存储器536既可以为rom或闪存等非易失性存储器,也可以为每当电路起动时临时保持从外部的rom供给的数据的易失性存储器。
[0094]
针对位置检测值p
fb
与实际的位移的关系,温度补偿部534对关系根据温度变化而变化的情况进行修正。
[0095]
控制器560接收位置指令值p
ref
、以及修正部530所进行的修正后的位置检测值p
fb_cmp
。但是,针对af,会接收修正部530所进行的修正后,进一步地,也实施了串扰修正后的位置检测值p
fb_cmp
。针对串扰修正,会在后面叙述。控制器560以位置检测值p
fb_cmp
与位置指令值p
ref
一致的方式,生成控制指令值s
ref
。控制器560例如包含误差检测器562和pid控制器564。误差检测器562生成位置检测值p
fb_cmp
与位置指令值p
ref
的差分(误差)δp。pid控制器564通过pid(比例、积分、微分)运算来生成控制指令值s
ref
。也可以是,代替pid控制器564
地,既可以使用pi控制器,也可以采用非线性控制。
[0096]
驱动器部570将与控制指令值s
ref
相应的驱动电流供给到致动器60。
[0097]
接着,针对串扰修正进行说明。在af的修正部530的后级,设置有串扰修正dsp580。串扰修正dsp580包括第1存储器582、第2存储器584、以及处理器586。
[0098]
第1存储器582对作为基准位置p0的位置信息的ois的霍尔信号值(修正部530的输出)进行存储。第2存储器584存储修正信息,该修正信息表示自基准位置p0的位移量δp(=r)与用于自动对焦的位置检测信号的修正量的关系。处理器586根据手抖修正动作中的自基准位置p0的位移量δp(=r)来算出用于自动对焦的位置检测信号p
fb’的修正量,并且从用于自动对焦的位置检测信号中减去该修正量。在存储器582、584内,预先存储有在出厂时或照相机起动时的校准中需要的信息。
[0099]
在af及ois的动作中,修正部530所进行的修正后的ois的x轴、y轴的位置检测值分支,并被分别取入到串扰修正dsp580内。串扰修正dsp580的处理器586对当前的位置检测值与相当于预先存储的基准位置p0的位置检测值的差分进行运算,基于x轴、y轴各自的差分信息δx、δy,通过
[0100]
r=√(δx2 δy2)
[0101]
来进行半径换算,根据预先存储的r与af的位置检测值的变化的关系来计算针对当前的r的串扰修正值,对af的位置检测值的串扰进行修正,并输出位置检测值p
fb_cmp
。由上,ois位移所导致的对af位置检测信号的串扰被修正。
[0102]
接着,用图10的(a)~图10的(c),针对实际的af位置检测信号的修正例进行说明。图10的(a)表示修正前的af的行程位置与位置检测信号的关系。图的纵轴表示磁通密度,但因为会得到与磁通密度成比例的位置检测信号,所以作为位置检测信号也是相同的。与图6同样,假设磁铁的n极向下,因此将图的纵轴的磁通密度的坐标轴设定为向下。作为磁通密度的绝对值,越是处于上方就会越小。af位置检测信号根据af行程位置而变化,反过来说,能够根据af位置检测信号来确定af行程位置。af行程位置与af位置检测信号的关系并非线性,而是描绘有若干上凸的曲线。此外,可知图因自基准位置的位移量(进行半径换算并以r来表示)而整体偏置,且包含串扰成分。
[0103]
在图10的(a)中,与r的值相应的位置检测值的变化量根据af行程位置而变化,越是图的右侧,基于r的差就越是变小。因此,在该状态下,即使针对每个r的值都赋予偏置修正值,适当修正值也会根据af行程位置而不同,因此在行程的整个区域中,无法进行正确的串扰修正。因此,在进行串扰修正前,首先执行线性修正。图10的(b)表示针对图10的(a)的结果实施线性修正后的结果。针对线性修正的方法,用图11在后面进行叙述。
[0104]
根据图10的(b)的结果,每个r的值的af行程位置与af位置检测值的关系表示为直线,且分别大致平行。因此,当针对每个r的值都赋予用于串扰修正的偏置时,如图10的(c)那样,多个条件的结果大致被修正为1根直线。即,线性修正与串扰修正这两者会被执行。
[0105]
接着,针对线性修正,用图11来进行若干补充说明。图11是用于说明线性修正的顺序的图。图的横轴为af行程,以实线来表示从无限远(inf)侧的机械端位置起到微距(macro)侧的机械端位置为止的磁通密度(af位置检测信号)的变化。在inf侧机械端处,af位置检测磁铁与af霍尔元件的距离最为接近,因此,磁通密度的绝对值表示最大值bi。在macro侧机械端处,距离最为远离,因此磁通密度的绝对值表示最小值bm。实线的图为距离
的函数,因此表示为2次曲线,并向上凸出。对这种关系进行线性修正。
[0106]
进行修正,使得线性修正后的直线为连结曲线图的两端的直线。对每个af行程位置的af的霍尔信号进行修正,使其成为该直线的函数。以高次的函数来使实线的图拟合,求得该函数的反函数,将被检测到的霍尔信号代入到反函数中,将其转换为行程位置信息,并对霍尔信号进行修正,使其在行程位置使其形成假想的直线,由此能够实现线性修正。
[0107]
以上那样的相机模块被用于智能手机等便携设备等。尤其是,本公开的照相机模块的优选的应用之一为一种具备光学手抖修正(ois)功能和自动对焦(af)功能这两者的照相机模块,分别具备位置检测部件,且适用于如下情况是有效的:存在af的位置检测信号因ois动作而受到影响的、所谓的串扰。通过利用本公开,能够提供一种即使在初始状态(不进行手抖修正,没有电流施加的状态)下,位置检测磁铁中心与霍尔元件的感磁部的位置因组装偏差等而错开的情况下,也能够对自基准位置的偏置量进行半径换算,从而对与半径相应的位置检测信号的误差进行修正的串扰修正方法、以及具备这样的串扰修正功能的致动器驱动器。
[0108]
(变形例1)
[0109]
在实施方式中,假定了磁通密度b针对基准位置p0为完全的旋转对称的情况,但实际上,也可能会存在如下情况:磁通密度b的分布椭圆状地扁平。即,在图8的进程35中,也可能会存在如下情况:使其从基准位置起沿第1方向(u轴方向)位移某一距离时的af霍尔信号值sz与使其从基准位置起沿第2方向(y轴方向)位移相同的距离时的af霍尔信号值sz的值不同。在该情况下,导入2个常数au、av,基于r’=√(auδu2 avδv2)来进行半径换算,并将r’与af霍尔信号值sz的关系作为修正信息来保持即可。
[0110]
第1方向及第2方向可以沿椭圆的短轴方向及长轴方向(或其相反方向)取得。在x轴方向为短轴,y轴方向为长轴的情况下,可以通过r’=√(a
x
δh
x2
ayδh
y2
)来进行半径换算。然后,在实际动作中,可以基于r’=√(a
x
δh
x2
ayδh
y2
)来计算位移量r’,并基于位移量r’所对应的修正量来修正af霍尔信号值sz。
[0111]
(变形例2)
[0112]
在图8的进程36中,将换算半径r与基于af霍尔信号值sz的修正量的关系函数化并保存,但不限于此。例如也可以是,预先将换算半径r与修正量的关系以表格来保持,在进程38中,通过参照表格,取得换算半径r所对应的修正值。关于表格,在针对全部换算半径r的值而预先保持时,存储器容量会变大。因此,也可以是,将离散的多个换算半径r0、r1、r2…rn
与修正值c0、c1、c2…cn
的关系预先保持于表格,并针对中间的值r,通过线性插值来算出修正值c。
[0113]
[工业可利用性]
[0114]
本公开涉及照相机模块中的位置检测的串扰的修正方法、以及具备串扰修正功能的致动器驱动器。
[0115]
[附图标记说明]
[0116]1…
照相机模块
[0117]2…
摄像透镜
[0118]3…
af致动器
[0119]4…
ois致动器
[0120]5…
透镜筒
[0121]6…
透镜支架
[0122]
7a、7b
…
af弹簧
[0123]8…
磁铁支架
[0124]9…
悬挂线
[0125]
10
…
基座
[0126]
11
…
罩
[0127]
12
…
ois驱动磁铁
[0128]
13
…
ois线圈
[0129]
14
…
ois霍尔元件
[0130]
15
…
af位置检测磁铁
[0131]
16
…
af霍尔元件
[0132]
17
…
图像传感器
[0133]
18
…
模块基板
[0134]
19
…
传感器罩
[0135]
20
…
ir截止玻璃
[0136]
21
…
fpc
[0137]
22
…
致动器驱动器
[0138]
40
…
致动器驱动器
[0139]
42
…
af驱动部
[0140]
44
…
ois驱动部
[0141]
46
…
ois驱动部
[0142]
51
…
位置检测元件(霍尔元件)
[0143]
52
…
cpu
[0144]
53
…
陀螺仪传感器
[0145]
60、62、64
…
致动器
[0146]
100
…
照相机模块
[0147]
102
…
图像传感器
[0148]
110
…
可动部
[0149]
112
…
摄像透镜
[0150]
114
…
磁铁
[0151]
120
…
af位置检测部件
[0152]
130
…
af致动器
[0153]
140
…
ois位置检测部件
[0154]
150
…
ois致动器
[0155]
510
…
位置检测部
[0156]
512
…
霍尔放大器
[0157]
514
…
a/d转换器
[0158]
520
…
温度检测部
[0159]
522
…
恒流电路
[0160]
524
…
a/d转换器
[0161]
530
…
修正部
[0162]
532
…
线性补偿部
[0163]
534
…
温度补偿部
[0164]
536
…
存储器
[0165]
540、541
…
接口电路
[0166]
550、551
…
滤波器
[0167]
560
…
控制器
[0168]
562
…
误差检测器
[0169]
564
…
pid控制器
[0170]
570
…
驱动器部
[0171]
580
…
串扰修正dsp。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。