1.本技术涉及车辆技术领域,特别涉及一种车辆及其喇叭控制方法。
背景技术:
2.车辆中一般安装有常规喇叭,该常规喇叭发出的声音可以向四周传播。车辆在行驶过程中,若车辆前方有影响车辆行驶的对象(例如,行人、其他动物或其他车辆),则驾驶员可以控制车辆中安装的常规喇叭发出声音以提醒该对象。
技术实现要素:
3.本技术提供了一种车辆及其喇叭控制方法,所述技术方案如下:
4.一方面,提供了一种车辆的喇叭控制方法,所述车辆包括定向喇叭,所述定向喇叭与所述车辆的车身连接,且能够相对于所述车身旋转;所述方法包括:
5.若检测到所述车辆与目标对象之间的目标距离小于距离阈值,则基于距离与音量的对应关系,确定所述目标距离对应的目标音量;
6.若检测到所述目标对象未处于所述定向喇叭的发声区域内,则基于所述目标对象的位置旋转所述定向喇叭,使得所述目标对象位于旋转后的所述定向喇叭的发声区域内;
7.控制所述定向喇叭发出所述目标音量的声音。
8.另一方面,提供了一种车辆,所述车辆包括处理器和定向喇叭,所述定向喇叭与所述车辆的车身连接,且能够相对于所述车身旋转;所述处理器用于:
9.若检测到所述车辆与目标对象之间的目标距离小于距离阈值,则基于距离与音量的对应关系,确定所述目标距离对应的目标音量;
10.若检测到所述目标对象未处于所述定向喇叭的发声区域内,则基于所述目标对象的位置旋转所述定向喇叭,使得所述目标对象位于旋转后的所述定向喇叭的发声区域内;
11.控制所述定向喇叭发出所述目标音量的声音。
12.可选的,所述处理器用于:
13.基于所述目标对象的位置,确定所述目标对象与所述定向喇叭的参考点的目标连线相对于所述定向喇叭的发声区域的偏转角度;
14.沿靠近所述目标对象的方向,将所述定向喇叭旋转所述偏转角度。
15.可选的,所述偏转角度为所述目标连线与所述发声区域的中轴线的夹角,且所述偏转角度小于180度。
16.可选的,所述处理器用于:
17.若所述目标对象位于所述中轴线的顺时针侧,则沿顺时针方向将所述定向喇叭旋转所述偏转角度;
18.若所述目标对象位于所述中轴线的逆时针侧,则沿逆时针方向将所述定向喇叭旋转所述偏转角度。
19.可选的,所述定向喇叭的最大覆盖区域能够划分为多个子区域,每个所述子区域
的角度小于或等于所述定向喇叭的发声区域的角度;所述处理器用于:
20.基于所述目标对象的位置,从所述多个子区域中确定所述目标对象所处的目标子区域;
21.基于所述目标子区域,所述定向喇叭的发声区域所处的子区域,以及子区域与旋转角度的对应关系,确定目标角度;
22.将所述定向喇叭旋转所述目标角度。
23.可选的,所述处理器用于:
24.若检测到所述目标对象位于所述定向喇叭的最大覆盖区域内,且未处于所述定向喇叭的发声区域内,则基于所述目标对象的位置旋转所述定向喇叭。
25.可选的,所述最大覆盖区域的角度为360度。
26.可选的,所述处理器还用于:
27.将所述定向喇叭旋转至初始位置。
28.可选的,所述处理器用于:
29.若检测到所述车辆与多个对象之间的距离均小于距离阈值,则获取目标图像;
30.显示所述目标图像,所述目标图像包括所述多个对象中每个所述对象的子图像;
31.响应于针对所述多个对象中所述目标对象的子图像的触控操作,基于距离与音量的对应关系,确定所述目标距离对应的目标音量。
32.又一方面,提供了一种车辆,所述车辆包括:存储器,处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述方面所述的车辆的喇叭控制方法。
33.再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序由车辆加载并执行以实现如上述方面所述的车辆的喇叭控制方法。
34.再一方面,提供了一种包含指令的计算机程序产品,当所述计算机程序产品在车辆上运行时,使得所述车辆执行上述方面所述的车辆的喇叭控制方法。
35.本技术提供的技术方案带来的有益效果至少包括:
36.本技术提供了一种车辆及其喇叭控制方法,车辆能够采用定向喇叭发出目标音量的声音对目标对象进行提醒。由于定向喇叭发声后,传递至该定向喇叭的发声区域外的声波的声强较小,因此在实现提醒目标对象的前提下,能够避免对位于该发声区域外的对象的造成噪声干扰,提高了提醒的针对性。由于目标音量是车辆基于目标对象到车辆的距离,以及距离与音量的对应关系确定的,即车辆能够自动根据目标对象到车辆的距离调节定向喇叭的音量,因此一方面提高了音量调节的效率,且提高了提醒的灵活性,另一方面可以避免因音量过大惊吓行人。
37.并且,车辆能够控制定向喇叭相对于车身旋转,以使目标对象位于旋转后的定向喇叭的发声区域内,如此可以确保车辆提醒的有效性。
附图说明
38.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于
本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
39.图1是本技术实施例提供的一种车辆的结构示意图;
40.图2是本技术实施例提供的一种定向喇叭的发声示意图;
41.图3是本技术实施例提供的一种车辆的喇叭控制方法的流程图;
42.图4是本技术实施例提供的另一种车辆的喇叭控制方法的流程图;
43.图5是本技术实施例提供的一种车辆中安装的雷达检测组件的示意图;
44.图6是本技术实施例提供的一种车辆中安装的图像采集组件的示意图;
45.图7是本技术实施例提供的一种旋转角度的示意图;
46.图8是本技术实施例提供的另一种旋转角度的示意图;
47.图9是本技术实施例提供的又一种旋转角度的示意图;
48.图10是本技术实施例提供的再一种旋转角度的示意图;
49.图11是本技术实施例提供的一种最大覆盖区域包括的多个子区域的示意图;
50.图12是图11所示的各个子区域的中轴线的示意图;
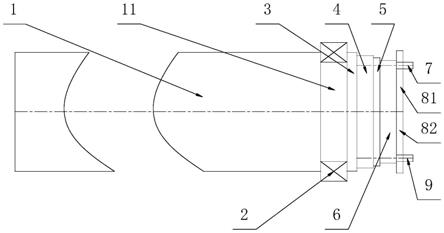
51.图13是本技术实施例提供另一种车辆的结构示意图。
具体实施方式
52.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
53.图1是本技术实施例提供的一种车辆的结构示意图。参见图1,该车辆00可以包括定向喇叭01,该定向喇叭01可以位于车辆00的车顶上。例如,定向喇叭01可以位于车顶的中心位置处。并且,定向喇叭01可以与车辆00的车身连接,且能够相对于车身旋转。该定向喇叭01可以围绕旋转轴旋转。该旋转轴的延伸方向可以垂直于车顶所在平面。
54.其中,定向喇叭也可以称为有源定向扬声器。参见图2,定向喇叭发出的声音(也可以称为声波)的声强在该定向喇叭的发声区域内较强,而在该发声区域外较弱,甚至接近于零。由此可见,定向喇叭发出的声波的指向性较强。并且,定向喇叭发出的声波的衰减较普通喇叭的弱。例如,相同声强的情况下,普通喇叭发出的声音的传输距离为50米(m),定向喇叭发出的声音的传输距离可达300m。此外,在定向喇叭发出的声波的最大传输距离内,定向喇叭发出的声波在距该定向喇叭较近位置处的声强,与距该定向喇叭较远位置处的声强接近。从图2可以看出,定向喇叭01的发声区域的角度可以为30度
°
左右。
55.由于该定向喇叭01位于车顶上,因此可以确保定向喇叭01能够旋转自如,且车辆的其他车身组件不会位于该定向喇叭01的发声区域内,从而可以避免定向喇叭01发出的声波被该其他车身组件遮挡的问题。又由于车辆通常是通过定向喇叭01对路上的行人进行提醒,且大多数人站立时,耳朵的高度与车顶的高度较近,因此可以确保提醒的有效性。
56.在本技术实施例中,该定向喇叭01可以与马达连接,该马达可以与车身连接。由此可见,定向喇叭01可以通过马达与车身连接。
57.图3是本技术实施例提供的一种车辆的喇叭控制方法的流程图,该方法可以应用于车辆,例如图1所示的车辆。该车辆包括定向喇叭,定向喇叭与车辆的车身连接,且能够现对于车身旋转。如图3所示,该方法包括:
58.步骤101、若检测到车辆与目标对象之间的距离小于距离阈值,则基于距离与音量的对应关系,确定目标距离对应的目标音量。
59.其中,每个对象可以为行人、其他动物或车辆。距离阈值以及距离与音量的对应关系均可以车辆中预先存储的。例如,距离阈值可以为5m。
60.在本技术实施例中,若车辆检测到一个到车辆的距离小于距离阈值的对象,则可以直接将该对象作为目标对象。若车辆检测到多个到车辆的距离小于距离阈值的对象,则车辆可以响应于驾驶员的选择操作从多个对象中选择一个对象作为目标对象。
61.步骤102、若检测到目标对象未处于定向喇叭的发声区域内,则基于目标对象的位置旋转定向喇叭,使得目标对象位于旋转后的定向喇叭的发声区域内。
62.通常车辆与目标对象之间的距离小于距离阈值时,目标对象会影响车辆的行驶,因此此时车辆需要控制定向喇叭对目标对象进行提醒。由于定向喇叭对位于其发声区域内的对象才能够实现提醒,因此车辆在检测到车辆与目标对象之间的距离小于距离阈值后,可以目标对象是否处于定向喇叭的发声区域内。若车辆确定目标对象处于定向喇叭的发声区域内,则可以直接执行下述步骤103。若车辆确定目标对象未处于定向喇叭的发声区域内,则可以先基于目标对象的位置旋转定向喇叭,使得目标对象位于旋转后的定向喇叭的发声区域内。之后,车辆可以执行步骤103。
63.例如,车辆若检测到目标对象未处于定向喇叭的发声区域,则可以确定目标连线沿第一方向旋转至定向喇叭的发声区域的旋转角度,目标连线为目标对象与定向喇叭的参考点之间的连线。之后,车辆即可沿第二方向将定向喇叭旋转该旋转角度。第一方向与第二方向相反。或者,车辆可以确定目标连线相对于该发声区域的偏转角度,之后车辆可以沿靠近目标对象的方向,将定向喇叭旋转该偏转角度。
64.步骤103、控制定向喇叭发出目标音量的声音。
65.车辆在旋转定向喇叭以使目标对象位于定向喇叭的发声区域内后,即可控制旋转后的定向喇叭发出目标音量的声音。该声音可以用于提醒目标对象。
66.综上所述,本技术实施例提供了一种车辆的喇叭控制方法,车辆能够控制定向喇叭发出目标音量的声音对目标对象进行提醒。由于定向喇叭发声后,传递至该定向喇叭的发声区域外的声波的声强较小,因此在实现提醒目标对象的前提下,能够避免对位于该发声区域外的对象的造成噪声干扰,提高了提醒的针对性。由于目标音量是车辆基于目标对象到车辆的距离,以及距离与音量的对应关系确定的,即车辆能够自动根据目标对象到车辆的距离调节定向喇叭的音量,因此一方面提高了音量调节的效率,且提高了提醒的灵活性,另一方面可以避免因音量过大惊吓行人。
67.并且,车辆能够控制定向喇叭相对于车身旋转,以使目标对象位于旋转后的定向喇叭的发声区域内,如此可以确保车辆提醒的有效性。
68.本技术实施例以目标对象为从多个对象中选择出的为例,对本技术实施例提供的方法进行示例性的说明。参见图4,该方法可以包括:
69.步骤201、若检测到车辆与多个对象之间的距离均小于距离阈值,则获取目标图像。
70.在本技术实施例中,车辆安装有距离检测组件和图像采集组件。车辆可以基于该距离检测组件采集到的检测信号,检测车辆周围是否存在到车辆的距离小于距离阈值的多
个对象。若车辆基于该检测信号检测到该车辆与多个对象之间的距离均小于距离阈值,则可以获取通过图像采集组件采集的包括目标图像。其中,该目标图像包括多个对象中每个对象的子图像。每个对象可以为行人、其他动物或车辆。距离阈值可以是车辆中预先存储的。例如,该距离阈值可以为5m。
71.可选的,该距离检测组件可以为下述组件中的一种:雷达检测组件和图像采集组件。例如,该距离检测组件可以为雷达检测组件。若距离检测组件为雷达检测组件,则该检测信号为雷达检测信号。若距离检测组件为图像采集组件,则该检测信号为图像采集组件采集到的图像。
72.可以理解的是,若距离检测组件为雷达检测组件,则车辆基于雷达检测信号确定多个对象到车辆的距离均小于距离阈值后,即可控制图像采集组件启动以获取目标图像。若距离检测组件为图像采集组件,则车辆基于图像采集组件采集到的图像确定多个对象到车辆的距离均小于距离阈值后,即可直接获取包括多个对象中每个对象的子图像的目标图像。
73.图5是本技术实施例提供的一种车辆中安装的雷达检测组件的示意图。如图5所示,该雷达检测组件可以包括:多个雷达02,该多个雷达02分布在车辆的不同位置处,如此可以实现对车辆周围的全面检测。例如,从图5可以看出,车辆的车头处设置有三个雷达02a至02c,车尾处设置有三个雷达02d至02f,车辆的一侧设置有一个雷达02g,车辆的另一侧设置有一个雷达02h。
74.图6是本技术实施例提供的一种车辆中安装的图像采集组件的示意图。如图6所示,该图像采集组件可以包括:多个摄像头03,该多个摄像头03可以位于车辆的不同位置处,从而可以采集车辆周围的图像。例如,从图6可以看出,车辆的车头处可以设置有一个摄像头03a,车尾处设置有一个摄像头03b,车辆的一侧设置有一个摄像头03c,车辆的另一侧设置有一个摄像头03d。由此可见,若多个摄像头均采集图像,则采集到的图像可以为车辆的360
°
全景环视俯视图。
75.可选的,从图6还可以看出,该图像采集组件包括的多个摄像头还可以包括:车辆的行车记录摄像头03e和后视摄像头03f。
76.以距离检测组件为雷达检测组件,且雷达检测组件包括图6所示的多个雷达02,图像采集组件包括图7所示的多个摄像头03为例,对车辆在检测到多个对象与车辆之间的距离均小于距离阈值后,获取目标图像的过程进行示例性的说明。
77.结合图6和图7,若车辆基于雷达02a至雷达02c采集的检测信号确定位于车辆前方的多个对象到车辆的距离均小于距离阈值,则可以控制摄像头a启动以采集图像,从而得到目标图像。若车辆基于雷达02d至雷达02f采集的检测信号确定位于车辆后方的多个对象到车辆的距离均小于距离阈值,则可以控制摄像头b启动以采集目标图像。若车辆基于雷达02g采集的检测信号确定位于车辆一侧的多个对象到车辆的距离均小于距离阈值,则可以控制摄像头c启动以采集目标图像。若车辆基于雷达02h采集的检测信号确定位于车辆另一侧的多个对象到车辆的距离均小于距离阈值,则可以控制摄像头d启动以采集目标图像。
78.可选的,对于图像采集组件还包括行车记录摄像头03e和后视摄像头03f的场景,若车辆基于雷达02a至雷达02c采集的检测信号确定位于车辆前方的至少一个对象到车辆的距离均小于距离阈值,则还可以控制行车记录摄像头03e启动。若车辆基于雷达02d至雷
达02f采集的检测信号确定位于车辆后方的至少一个对象到车辆的距离均小于距离阈值,则还可以控制后视摄像头03f启动。
79.由此可见,车辆基于用于采集某一方向的检测信号的雷达确定该方向存在多个到车辆的距离均小于距离阈值的对象,则可以控制安装在车辆上的用于采集该方向的图像的摄像头启动以采集目标图像。
80.步骤202、显示目标图像。
81.车辆在采集到目标图像后,即可显示该目标图像。例如,车辆可以包括显示屏(例如中控显示屏),车辆可以在该显示屏中显示该图像。
82.可选的,车辆在显示目标图像时,还可以显示车辆的俯视图,以便驾驶员获知多个对象相较于车辆的方位。
83.可选的,车辆中可以安装有定向提醒应用,车辆在获取目标图像后,即可自动运行定向提醒应用,并在该定向提醒应用的应用界面中显示该目标图像。如此,提高了目标图像的显示效率,提升了驾驶员的驾乘体验。
84.对于车辆中还安装有常规喇叭的场景,车辆在该应用界面中显示图像后,还可以关闭常规喇叭,并为定向喇叭上电,以使定向喇叭启动。如此,后续驾驶员按压方向盘上的喇叭按键时,定向喇叭即可发出声音。
85.步骤203、响应于针对多个对象中目标对象的子图像的触控操作,基于距离与音量的对应关系,确定目标对象与车辆之间的目标距离对应的目标音量。
86.驾驶员可以触控车辆显示的目标图像。若驾驶员触控了该目标图像包括的多个对象中目标对象的子图像,即驾驶员的触控操作为针对目标对象的子图像的触控操作,则车辆可以响应于驾驶员针对目标对象的子图像的触控操作,确定目标对象与车辆之间的目标距离。之后,车辆可以基于距离与音量的对应关系,确定目标距离对应的目标音量。其中,距离与音量的对象关系可以是车辆中预先存储的。
87.在本技术实施例中,车辆在接收到来自驾驶员的触控操作后,若确定该触控操作的位置位于多个对象中目标对象的子图像所在区域中,则可以确定该触控操作为针对目标对象的子图像的触控操作。
88.可选的,车辆可以采用表格记录距离与音量的对应关系。例如,表1示出了一种距离与音量的对应关系,从表1中可以看出,若距离小于1m,则该距离对应的音量可以为70分贝(db)。若距离大于等于3m且小于4m,则该距离对应的音量可以85db。
89.表1
90.距离d音量(db)《1m701m≤d《2m752m≤d《3m803m≤d《4m854m≤d90
91.在本技术实施例中,对于每个对象,由于车辆通过雷达检测组件确定的该对象到车辆的距离的精度,较通过摄像头采集的图像确定的该对象到车辆的距离的精度高,因此车辆在接收到驾驶员的针对目标对象的子图像的触控操作后,即可获取通过雷达检测组件
采集的检测信号确定的该目标对象的位置到车辆的距离。如此,可以确保基于目标距离确定的目标音量的准确性较高。
92.可选的,车辆可以基于雷达检测组件采集的检测信号确定每个对象相对于车辆的第一位置,且可以响应于驾驶员针对目标对象的子图像的触控操作确定目标对象相对于车辆的第二位置。之后,车辆可以将雷达检测组件检测到多个对象中,第一位置与第二位置的差值小于差值阈值的对象确定为目标对象,继而即可获取基于雷达检测组件采集的检测信号确定该目标对象到车辆的目标距离。其中,该差值阈值可以是车辆中预先存储的。
93.由此可见,本技术实施例提供的车辆,可以结合雷达检测组件和图像采集组件来确定目标对象到车辆的目标距离。如此,一方面,可以避免仅采用图像采集组件易因恶劣天气(例如大雨天气、雾霾天气)导致确定的该目标距离的精度较低的问题,另一方面可以避免基于图像采集组件采集的图像确定该目标距离需浪费车辆较多的处理资源的问题,从而降低了车辆的运算开销。
94.可选的,车辆在快速行驶(即车速大于等于车速阈值)时,胎噪通常较大,能够提醒行人,但可能无法对车辆周围的车辆进行有效提醒。因此此时车辆通过定向喇叭主要对位于该车辆周围的车辆(例如位于该车辆后方或者位于该车辆前方的车辆)进行提醒。在对周围的车辆进行提醒时,车辆通常控制定向喇叭发出默认音量的声音进行提醒,即车辆不对定向喇叭的音量进行调控。其中,该默认音量可以为定向喇叭的最大音量。车速阈值可以是车辆中预先存储的,例如可以为30千米每小时(km/h)。
95.而车辆在缓慢行驶(即车速小于车速阈值)时,胎噪无法有效提醒位于车辆周围的对象(例如行人)。由于该对象可能为行人,因此此时车辆通过定向喇叭对对象进行提醒时,可以调节定向喇叭的音量,以避免定向喇叭发出声音的音量较大,使得行人受到惊吓。基于此,车辆在接收到驾驶员针对目标对象的子图像的触控操作后,若确定车速小于车速阈值,则可以基于目标对象与车辆之间的目标距离确定目标距离对应的目标音量。若车辆确定车速大于等于车速阈值,则可以直接执行下述步骤204。
96.在本技术实施例中,车辆中还安装有车速传感器。车辆可以通过该车速传感器获取车辆的车速。
97.步骤204、检测目标对象是否位于定向喇叭的最大覆盖区域内。
98.车辆在确定目标对象后,还可以基于目标对象的位置检测目标对象是否位于定向喇叭的最大覆盖区域内。若车辆确定目标对象位于定向喇叭的最大覆盖区域内,则可以执行步骤205。若车辆确定目标对象未位于该最大覆盖区域内,则可以结束操作,无需执行后续操作。
99.其中,定向喇叭的最大覆盖区域可以是指:定向喇叭从第一极限位置旋转至第二极限位置的过程中,该定向喇叭的发声区域所能覆盖的区域。第一极限位置可以是指:定向喇叭沿第一方向所能旋转到的极限位置。第二极限位置可以是指:定向喇叭沿第二方向所能旋转到的极限位置。该第一方向与第二方向相反。例如,若第一方向为顺时针方向,则第二方向为逆时针方向。若第一方向为逆时针方向,则第二方向为顺时针方向。该最大覆盖区域可以是预先设置的,例如可以是车辆出厂前设置的,或者可以是驾驶员预先设置的。本技术实施例对此不做限定。
100.可选的,定向喇叭的最大覆盖区域的角度可以为360度(
°
)、180
°
或120
°
。本技术实
施例对此不做限定。例如,定向喇叭的最大覆盖区域的角度为360
°
。
101.在本技术实施例中,车辆中可以预先存储有第一连线与第一参考线之间的第一角度,以及第二连线与第一参考线之间的第二角度。其中,第一连线可以是指第一极限位置与定向喇叭的参考点之间的连线。第二连线可以是第二极限位置与该参考点之间的连线。第一参考线可以为以该参考点为顶点,且位于定向喇叭的最大覆盖区域中的任一射线,例如第一参考线可以为与该最大覆盖区域的中轴线重合的射线。可选的,该参考点可以是定向喇叭上与车身连接的一点。
102.车辆在确定目标对象的位置后,可以确定目标连线与第一参考线之间的角度,该目标连线为目标对象的位置与参考点的连线。若车辆确定该角度小于等于第一角度,或者该角度小于等于第二角度,则可以确定目标对象位于定向喇叭的最大覆盖区域内。若车辆确定该角度大于第一角度,或者大于第二角度,则可以确定目标对象并未处于定向喇叭的最大覆盖区域内。
103.步骤205、检测目标对象是否位于定向喇叭的发声区域内。
104.若车辆确定目标对象位于定向喇叭的最大覆盖区域内,则可以检测目标对象是否位于定向喇叭当前的发声区域内。若目标对象未位于定向喇叭当前的发声区域内,则可以执行步骤206。若目标对象位于定向喇叭当前的发声区域内,则可以直接执行步骤206。
105.在本技术实施例中,车辆可以确定定向喇叭的发声区域的第一边界线与第二参考线之间的第三角度,以及该发声区域的第二边界线与第二参考线之间的第四角度。该第二参考线可以为经过定向喇叭的参考点,且位于定向喇叭的发声区域内的任一射线。例如,该第二参考线可以为与该发声区域重合的射线。之后,若车辆检测到目标连线与第二参考线之间的角度小于等于该第三角度,或者小于等于该第四角度,则可以确定目标对象位于定向喇叭的发声区域内。若车辆检测到目标连线与第二参考线之间的角度大于该第三角度,或者大于该第四角度,则可以确定目标对象未位于定向喇叭的发声区域内。
106.步骤206、基于目标对象的位置旋转定向喇叭,使得目标对象位于旋转后的定向喇叭的发声区域内。
107.若车辆确定目标对象并未位于定向喇叭的发声区域内,则可以基于目标对象的位置旋转定向喇叭,使得目标对象位于旋转后的定向喇叭的发声区域内。
108.在一种可选的实现方式中,车辆可以基于目标对象的位置,确定目标对象与定向喇叭的参考点的目标连线相对于定向喇叭的发声区域的偏转角度。之后,车辆可以沿靠近目标对象的方向,将定向喇叭旋转该偏转角度,以使目标对象位于旋转后的定向喇叭的发声区域内。
109.其中,目标连线相对于定向喇叭的发声区域的偏转角度可以为:目标连线与该发声区域内的任一射线的夹角,该射线的顶点可以为定向喇叭的参考点。例如,该偏转角度可以是指目标连线与第二参考线的夹角。并且,该偏转角度可以小于180度。
110.由于本技术实施例提供的车辆能够沿靠近目标对象的方向旋转喇叭,因此可以提高定向喇叭的旋转效率,且可以延长马达的使用寿命。
111.在本技术实施例中,目标对象可能位于定向喇叭的发声区域的顺时针侧,也可能位于该发声区域的逆时针侧。基于此,车辆基于目标连线相对于定向喇叭的发声区域的偏转角度,沿靠近目标对象的方向,旋转定向喇叭的过程可以包括:若车辆确定目标对象位于
该发声区域的中轴线的顺时针侧,则沿顺时针方向将定向喇叭旋转偏转角度,以使目标对象位于旋转后的定向喇叭的发声区域内。若车辆确定目标对象位于该发声区域的中轴线的逆时针侧,则沿逆时针方向将定向喇叭旋转偏转角度,以使目标对象位于旋转后的定向喇叭的发声区域内。
112.以定向喇叭的发声区域的中轴线平行于坐标系中的x轴,且该发声区域朝向x轴的正方向为例,对车辆判断目标对象在中轴线的顺时针侧还是逆时针侧,确定目标连线与中轴线之间的角度,以及基于该角度控制定向喇叭旋转的过程进行示例性说明:
113.参见图7和图8,图7和图8中的点p1为定向喇叭的参考点,点p2为驾驶员的触控操作的触控点,点p1的坐标为(p1.x,p1.y),点p2的坐标为(p2.x,p2.y)。并且,该发声区域的中轴线的顺时针侧为朝向x轴下方的一侧,该中轴线的逆时针侧为朝向x轴上方的一侧。
114.如图7所示,由于点p2位于点p1朝向x轴下方的一侧,因此车辆可以确定目标对象位于该发声区域的中轴线的顺时针侧。之后,车辆可以确定点p1和点p2之间的目标连线,与x轴的角度,继而可以将定向喇叭沿顺时针方向旋转该角度。其中,该目标连线与x轴的角度即为图7所示的角α,且角α满足:α=arctan[(p2.y-p1.y)/(p2.x-p1.x)]。
[0115]
假设角度前面的符号“ ”用于指示车辆将定向喇叭顺时针旋转该角度,p1.x为40,p1.y为30,即点p1在图7所示的坐标系中的坐标为(40,30),p2.x为80,p2.y为60,即点p2在图7所示的坐标系中的坐标为(80,60)。则车辆可以通过执行下述指令,确定定向喇叭应当旋转的角度:
[0116]
var p1:point=new point(40,30);
[0117]
var p2:point=new point(80,60);
[0118]
var angle:number=math.atan2((p2.y-p1.y),(p2.x-p1.x));//弧度0.6435011087932844
[0119]
var theta:number=angle*(180/math.pi);//角度36.86989764584402。
[0120]
根据上述指令,车辆确定在确保目标对象位于旋转后的定向喇叭的发声区域内时,定向喇叭应当旋转的角度为36.86989764584402
°
。
[0121]
如图8所示,由于点p2位于点p1朝向x轴上方的一侧,因此车辆可以确定目标对象位于该发声区域的中轴线的逆时针侧。之后,车辆可以确定点p1和点p2之间的目标连线,与x轴的角度,继而可以将定向喇叭沿逆时针方向旋转该角度。其中,该目标连线与x轴的角度即为图8所示的角β,且角β满足:β=arctan[(p1.y-p2.y)/(p2.x-p1.x)]。
[0122]
假设角度前面的符号
“‑”
用于指示车辆将定向喇叭逆时针旋转该角度,继续为p1.x为40,p1.y为30,p2.x为80,p2.y为60为例,则车辆可以执行下述指令,以得到定向喇叭应当旋转的角度:
[0123]
var p1:point=new point(40,30);
[0124]
var p2:point=new point(80,60);
[0125]
var angle:number=math.atan2((p1.y-p2.y),(p2.x-p1.x))//弧度-0.6435011087932844;
[0126]
var theta:number=angle*(180/math.pi);//角度-36.86989764584402。
[0127]
根据上述指令,车辆确定在确保目标对象位于旋转后的定向喇叭的发声区域内时,定向喇叭应当旋转的角度为-36.86989764584402
°
。
[0128]
以定向喇叭的发声区域的中轴线平行于坐标系中的y轴,且该发声区域朝向y轴的正方向为例,对车辆判断目标对象在中轴线的顺时针侧还是逆时针侧,确定目标连线与中轴线之间的角度,以及基于该角度控制定向喇叭旋转的过程进行示例性说明:
[0129]
参见图9和图10,图9和图10中的点p1为定向喇叭的参考点,点p2为驾驶员的触控操作的触控点。并且,该发声区域的中轴线的顺时针侧为朝向图9和图10所示的y轴右侧的一侧,该中轴线的逆时针侧为朝向y轴左侧的一侧。
[0130]
如图9所示,由于点p2位于点p1的右侧,因此车辆可以确定目标对象位于该发声区域的中轴线的顺时针侧。之后,车辆可以确定点p1和点p2之间的目标连线,与y轴的角度,继而可以将定向喇叭沿顺时针方向旋转该角度。其中,该目标连线与y轴的角度即为图9所示的角γ,且角γ满足:γ=arctan[(p2.x-p1.x)/(p2.y-p1.y)]。
[0131]
继续以p1.x为40,p1.y为30,p2.x为80,p2.y为60为例,则车辆可以通过执行下述指令,确定定向喇叭应当旋转的角度:
[0132]
var p1:point=new point(40,30);
[0133]
var p2:point=new point(80,60);
[0134]
var angle:number=math.atan2((p2.x-p1.x),(p2.y-p1.y));//弧度0.9272952180016122
[0135]
var theta:number=angle*(180/math.pi);//角度53.13010235415598。
[0136]
根据上述指令,车辆确定在确保目标对象位于旋转后的定向喇叭的发声区域内时,定向喇叭应当旋转的角度为53.13010235415598
°
。
[0137]
如图10所示,由于点p2位于点p1的左侧,因此车辆可以确定目标对象位于该发声区域的中轴线的逆时针侧。之后,车辆可以确定点p1和点p2之间的目标连线,与y轴的角度,继而可以将定向喇叭沿逆时针方向旋转该角度。其中,该目标连线与x轴的角度即为图10所示的角δ,且角δ满足:δ==arctan[(p2.x-p1.x)/(p2.y-p1.y)]。
[0138]
以p1.x为-40,p1.y为30,p2.x为-80,p2.y为60为例,则车辆可以通过执行下述指令,确定定向喇叭应当旋转的角度:
[0139]
var p1:point=new point(-40,30);
[0140]
var p2:point=new point(-80,60);
[0141]
var angle:number=math.atan2((p2.x
–
p2.x),(p2.y
–
p1.y))//弧度0.9272952180016122
[0142]
var theta:number=angle*(180/math.pi);//角度-53.13010235415598。
[0143]
根据上述指令,车辆确定在确保目标对象位于旋转后的定向喇叭的发声区域内时,定向喇叭应当旋转的角度为-53.13010235415598
°
。
[0144]
在本技术实施例中,车辆在确定目标对象与定向喇叭的参考点的目标连线相对于定向喇叭的发声区域的偏转角度之后,可以通过执行下述指令旋转定向喇叭,以使目标对象位于旋转后的定向喇叭的发声区域中:
[0145]
if(-15《(angle-degree)《15)
[0146]
do nothing;
[0147]
else if(-180≤(angle-degree)≤-15)
[0148]
逆时针旋转马达degree-angle度;
[0149]
else if(15≤(angle-degree)≤180)
[0150]
顺时针旋转马达angle-degree度。
[0151]
上述指令中,degree为全局变量,且取值为0。angle为偏转角度。
[0152]
在另一种可选的实现方式中,定向喇叭的最大覆盖区域能够划分为多个子区域,每个子区域的角度小于或等于定向喇叭的发声区域的角度。这种实现方式下,车辆基于目标对象的位置旋转定向喇叭的过程可以包括:车辆先基于目标对象的位置,从多个子区域中确定目标对象所处的目标子区域。之后,车辆基于目标子区域,定向喇叭的发声区域所处的子区域,以及子区域与旋转角度的对应关系,确定目标角度,并将定向喇叭旋转目标角度。
[0153]
示例的,假设定向喇叭的最大覆盖区域的角度为360
°
,发声区域的角度为30
°
,该最大覆盖区域被划分为图11所示的子区域1至子区域12等12个子区域。每个子区域的角度均为30
°
。每个子区域所处的角度范围可以如表2所示。表2中,每个角度范围中的角度前面的符号表示对应的子区域的边界线旋转至第一参考线的旋转方向。其中,“ ”表示沿顺时针方向旋转,
“‑”
表示沿逆时针方向旋转。
[0154]
表2
[0155][0156][0157]
从表2可以看出,子区域1对应的角度范围为-15
°
至 15
°
,子区域8对应的角度范围为-165
°
至-135
°
,子区域12对应的角度范围为-45
°
至-15
°
。
[0158]
在本技术实施例,车辆可以基于子区域与旋转角度的对应关系,确定目标对象所处的目标子区域对应的第一旋转角度,并确定定向喇叭的发声区域所处的子区域的第二偏转角度。之后,车辆可以将第一旋转角度与第二旋转角度的差值,确定为目标角度。其中,子区域与旋转角度的对应关系可以是工作人员在车辆出厂前写入至车辆中的。
[0159]
在本技术实施例中,定向喇叭的中轴线与多个子区域中的任一子区域的中轴线重合时,定向喇叭发出的声音便能够对位于该子区域中的对象起到提醒作用。基于此,假设定向喇叭的工作角度为30
°
,子区域1至子区域12中各个子区域的中轴线依次为图12所示的中轴线a至中轴线l,定向喇叭的发声区域位于子区域1中,则得到子区域与旋转角度的对应关系可以如表3所示。表3中,“ ”表示沿顺时针方向旋转,
“‑”
表示沿逆时针方向旋转。
[0160]
表3
[0161][0162][0163]
从表3可以看出,子区域2对应的偏转角度为 30
°
,子区域12对应的偏转角度为-30
°
。由于车辆是在确定目标对象未位于定向喇叭的发声区域中才确定目标角度,因此本技术实施例中的目标对象不会位于子区域1中。
[0164]
在本技术实施例中,车辆在确定目标对象所处的目标子区域,以及定向喇叭的发声区域所处的子区域之后,可以通过执行下述指令,以确定目标角度:
[0165]
if(area_current-area≤6)
[0166]
angle=(area_current-area)*30;
[0167]
else
[0168]
angle=(area_current-7)*30-180。
[0169]
上述指令中,area_current为目标对象所处的子区域的标识,area为定向喇叭所处的子区域的标识。
[0170]
根据上述描述可知,本技术实施例提供的车辆可以通过分档实现对定向喇叭的旋转控制。
[0171]
步骤207、控制定向喇叭发出目标音量的声音。
[0172]
若车辆确定目标对象位于定向喇叭的发声区域内,则可以直接控制定向喇叭发出
目标音量的声音,以提醒目标对象。或者,若车辆确定目标对象未位于定向喇叭的发声区域内,但通过旋转定向喇叭以使目标对象位于定向喇叭的发声区域后,则可以控制定向喇叭发出目标音量的声音。
[0173]
在本技术实施例中,车辆完成针对定向喇叭的参数(即前文所述的音量和/或角度)的设置后,可以发出用于提示驾驶员定向喇叭的参数已经设置完成的提示消息。之后,驾驶员可以触控车辆的喇叭按键。相应的,车辆可以响应于针对该喇叭按键的触控操作,控制定向喇叭发出目标音量的声音。
[0174]
可选的,该提示消息可以为文本消息,和/或,声音消息。
[0175]
步骤208、将定向喇叭旋转至初始位置。
[0176]
车辆在控制定向喇叭发出目标音量的声音后,可以将定向喇叭旋转至初始位置。
[0177]
对于车辆在定向提醒应用的应用界面中显示采集到的目标图像的场景,车辆可以响应于针对该应用界面的退出操作,控制定向喇叭旋转至初始位置。
[0178]
可以理解的是,在车辆响应于驾驶员的触控操作从多个对象中确定目标对象的过程中,若车辆在接收到针对显示屏的触控操作(为了便于描述,后文将车辆接收到的第一个触控操作称为第一触控操作)后的目标时长内,接收到针对显示屏的第二触控操作,第二触控操作的操作位置与第一触控操作的操作位置均位于定向喇叭的发声区域的中轴线的顺时针侧或逆时针侧,且第二触控操作的操作位置与参考点的连线相对于该发声区域的偏转角度,与目标连线相对于该发声区域的偏转角度的差值的绝对值小于第二角度阈值,则禁止基于第二触控操作的操作位置与参考点的连线相对于该发声区域的偏转角度控制定向喇叭旋转。如此,可以避免因驾驶员误触显示屏而影响定向喇叭的旋转准确性的问题。其中,目标时长可以是车辆中预先存储的。
[0179]
上述实施例是以车辆包括一个定向喇叭为例进行的示例性说明,可以理解的是,车辆也可以包括多个定向喇叭,该多个定向喇叭的有效旋转角度之和可以为360
°
。对于多个定向喇叭中的每个定向喇叭,车辆均可以采用上述方法实施例提供的控制方式进行控制,本技术实施例在此不再赘述。
[0180]
需要说明的是,本技术实施例提供的车辆的喇叭控制方法的步骤的先后顺序可以进行适当调整,步骤也可以根据情况进行相应增减。例如,步骤201和步骤202也可以根据情况删除;或者,步骤204也可以根据情况删除;又或者,步骤208也可以根据情况删除。任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化的方法,都应涵盖在本技术的保护范围之内,因此不再赘述。
[0181]
综上所述,本技术实施例提供了一种车辆的喇叭控制方法,车辆能够控制定向喇叭发出目标音量的声音对目标对象进行提醒。由于定向喇叭发声后,传递至该定向喇叭的发声区域外的声波的声强较小,因此在实现提醒目标对象的前提下,能够避免对位于该发声区域外的对象的造成噪声干扰,提高了提醒的针对性。由于目标音量是车辆基于目标对象到车辆的距离,以及距离与音量的对应关系确定的,即车辆能够自动根据目标对象到车辆的距离调节定向喇叭的音量,因此一方面提高了音量调节的效率,且提高了提醒的灵活性,另一方面可以避免因音量过大惊吓行人。
[0182]
并且,车辆能够控制定向喇叭相对于车身旋转,以使目标对象位于旋转后的定向喇叭的发声区域内,如此可以确保车辆提醒的有效性。
[0183]
本技术实施例还提供了一种车辆,参见图13,该车辆包括处理器04和定向喇叭01,定向喇叭01与车辆的车身连接,且能够相对于车身旋转。该处理器04用于:
[0184]
若检测到车辆与目标对象之间的目标距离小于距离阈值,则基于距离与音量的对应关系,确定目标距离对应的目标音量;
[0185]
若检测到目标对象未处于定向喇叭的发声区域内,则基于目标对象的位置旋转定向喇叭,使得目标对象位于旋转后的定向喇叭的发声区域内;
[0186]
控制定向喇叭发出目标音量的声音。
[0187]
可选的,该处理器04可以用于:
[0188]
基于目标对象的位置,确定目标对象与定向喇叭的参考点的目标连线相对于定向喇叭的发声区域的偏转角度;
[0189]
沿靠近目标对象的方向,将定向喇叭旋转偏转角度。
[0190]
可选的,偏转角度为目标连线与发声区域的中轴线的夹角,且偏转角度小于180度。
[0191]
可选的,该处理器04可以用于:
[0192]
若目标对象位于中轴线的顺时针侧,则沿顺时针方向将定向喇叭旋转偏转角度;
[0193]
若目标对象位于中轴线的逆时针侧,则沿逆时针方向将定向喇叭旋转偏转角度。
[0194]
可选的,定向喇叭的最大覆盖区域能够划分为多个子区域,每个子区域的角度小于或等于定向喇叭的发声区域的角度。该处理器04可以用于:
[0195]
基于目标对象的位置,从多个子区域中确定目标对象所处的目标子区域;
[0196]
基于目标子区域,定向喇叭的发声区域所处的子区域,以及子区域与旋转角度的对应关系,确定目标角度;
[0197]
将定向喇叭旋转目标角度。
[0198]
可选的,该处理器04可以用于:
[0199]
若检测到目标对象位于定向喇叭的最大覆盖区域内,且未处于定向喇叭的发声区域内,则基于目标对象的位置旋转定向喇叭。
[0200]
可选的,最大覆盖区域的角度为360度。
[0201]
可选的,处理器04还可以用于:
[0202]
将定向喇叭旋转至初始位置。
[0203]
可选的,该处理器04可以用于:
[0204]
若检测到车辆与多个对象之间的距离均小于距离阈值,则获取目标图像;
[0205]
显示目标图像,目标图像包括多个对象中每个对象的子图像;
[0206]
响应于针对多个对象中目标对象的子图像的触控操作,基于距离与音量的对应关系,确定目标距离对应的目标音量。
[0207]
综上所述,本技术实施例提供了一种车辆,该车辆能够控制定向喇叭发出目标音量的声音对目标对象进行提醒。由于定向喇叭发声后,传递至该定向喇叭的发声区域外的声波的声强较小,因此在实现提醒目标对象的前提下,能够避免对位于该发声区域外的对象的造成噪声干扰,提高了提醒的针对性。由于目标音量是车辆基于目标对象到车辆的距离,以及距离与音量的对应关系确定的,即车辆能够自动根据目标对象到车辆的距离调节定向喇叭的音量,因此一方面提高了音量调节的效率,且提高了提醒的灵活性,另一方面可
以避免因音量过大惊吓行人。
[0208]
并且,车辆能够控制定向喇叭相对于车身旋转,以使目标对象位于旋转后的定向喇叭的发声区域内,如此可以确保车辆提醒的有效性。
[0209]
本技术实施例提供了一种车辆,该车辆可以包括存储器,处理器及存储在该存储器上并可在该处理器上运行的计算机程序,该处理器执行该计算机程序时实现如上述实施例提供的车辆的喇叭控制方法,例如图3或图4所示的方法。
[0210]
本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,该计算机程序由车辆加载并执行以上述实施例提供的车辆的喇叭控制方法,例如图3或图4所示的方法。
[0211]
本技术实施例还提供了一种包含指令的计算机程序产品,当计算机程序产品在车辆上运行时,使得车辆执行上述方法实施例提供的车辆的喇叭控制方法,例如图3或图4所示的方法。
[0212]
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0213]
应当理解的是,在本文中提及的“和/或”,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。并且,本技术中术语“至少一个”的含义是指一个或多个,本技术中术语“多个”的含义是指两个或两个以上。
[0214]
本技术中术语“第一”“第二”等字样用于对作用和功能基本相同的相同项或相似项进行区分,应理解,“第一”、“第二”、“第n”之间不具有逻辑或时序上的依赖关系,也不对数量和执行顺序进行限定。例如,在不脱离各种所述示例的范围的情况下,第一方向可以被称为第二方向,并且类似地,第二方向可以被称为第一方向。
[0215]
以上所述仅为本技术的示例性实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。