技术特征:
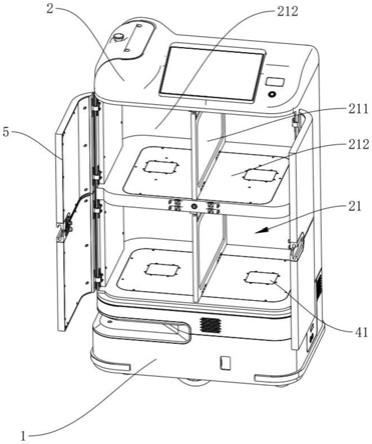
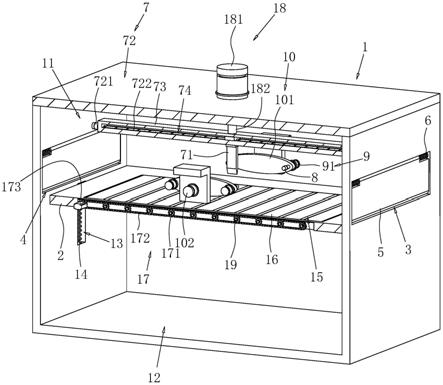
1.一种运输机器人,其特征在于,包括:机器人主体(1);货箱(2),其设置于所述机器人主体(1)上,所述货箱(2)包括至少一层储物仓(21),所述储物仓(21)沿水平方向通过隔板(211)分隔成多个单元格(212),所述隔板(211)可拆卸安装于所述储物仓(21)内,以使相邻所述单元格(212)能够拼接形成通仓(213),所述单元格(212)和所述通仓(213)均对应有预设型号的标本箱(3);检测机构,所述检测机构信号连接于所述机器人主体(1),所述检测机构用于检测所述标本箱(3)是否正确放置于所述单元格(212)或所述通仓(213)内并发送第一检测信号;所述机器人主体(1)根据所述第一检测信号判断是否移动。2.根据权利要求1所述的运输机器人,其特征在于,所述检测机构包括rfid检测单元(41),所述rfid检测单元(41)设置于所述单元格(212)内,所述rfid检测单元(41)能够识别设置于所述标本箱(3)上的标签。3.根据权利要求2所述的运输机器人,其特征在于,每个所述单元格(212)均设置有所述rfid检测单元(41)。4.根据权利要求3所述的运输机器人,其特征在于,适配于所述通仓(213)的所述标本箱(3)上设置有多个所述标签,所述标签的数量与所述通仓(213)内所述rfid检测单元(41)的数量相同。5.根据权利要求1所述的运输机器人,其特征在于,所述储物仓(21)的开口设置有隔仓门(5)。6.根据权利要求5所述的运输机器人,其特征在于,每个所述储物仓(21)内安装一个隔板(211),以形成两个所述单元格(212),所述储物仓(21)的开口设置有用于封堵两个所述单元格(212)的两个所述隔仓门(5),两个所述隔仓门(5)为对开门结构。7.根据权利要求1所述的运输机器人,其特征在于,所述储物仓(21)内还设置有检测件,所述检测件用于检测所述隔板(211)是否移除并发送第二检测信号,所述检测机构接收所述第二检测信号。8.根据权利要求1所述的运输机器人,其特征在于,所述储物仓(21)的顶壁和底壁设置有滑槽,所述隔板(211)滑动安装于所述滑槽内;或所述储物仓(21)的顶壁和底壁铰接有固定板,所述隔板(211)通过固定件连接于所述固定板。9.一种运输机器人的控制方法,其特征在于,应用于如权利要求1-8任一项所述的运输机器人,包括以下步骤:s1、发送配送信息,所述运输机器人根据所述配送信息移动至上货位置;s2、将盛放货物的标本箱(3)放入单元格(212)或通仓(213)内;s3、检测机构检测所述标本箱(3)是否正确放置于所述单元格(212)或所述通仓(213)内;若是,进行s4;s4、所述运输机器人根据所述配送信息移动至取货位置。10.根据权利要求9所述的运输机器人的控制方法,其特征在于,在所述s3步骤中,若否,提示操作不当,且所述运输机器人不移动。
技术总结
本发明涉及机器人技术领域,公开一种运输机器人及其控制方法。其中运输机器人包括机器人主体、货箱和检测机构。货箱设置于机器人主体上,货箱包括至少一层储物仓,储物仓沿水平方向通过隔板分隔成多个单元格,隔板可拆卸安装于储物仓内,以使相邻单元格能够拼接形成通仓,所述单元格和所述通仓均对应有预设型号的标本箱;检测机构信号连接于机器人主体,检测机构用于检测标本箱是否正确放置于单元格或通仓内并发送第一检测信号;机器人主体根据第一检测信号判断是否移动。本发明能够将不同尺寸的物品放置于不同型号的标本箱内,提高了货箱的利用率,以及运输机器人的运输准确性,提高生产效率。高生产效率。高生产效率。
技术研发人员:潘晶 冯义兴 田华
受保护的技术使用者:上海钛米机器人股份有限公司
技术研发日:2022.02.15
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。