技术特征:
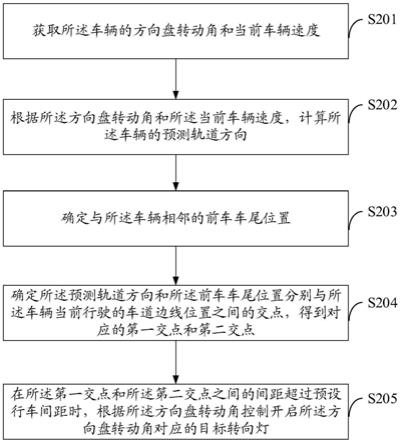
1.一种转向灯控制方法,其特征在于,应用于车辆中,所述方法包括:获取所述车辆的方向盘转动角和当前车辆速度;根据所述方向盘转动角和所述当前车辆速度,计算所述车辆的预测轨道方向;确定与所述车辆相邻的前车车尾位置;确定所述预测轨道方向和所述前车车尾位置分别与所述车辆当前行驶的车道边线位置之间的交点,得到对应的第一交点和第二交点;在所述第一交点和所述第二交点之间的间距超过预设行车间距时,根据所述方向盘转动角控制开启所述方向盘转动角对应的目标转向灯。2.根据权利要求1所述的方法,其特征在于,所述根据所述方向盘转动角控制开启所述方向盘转动角对应的目标转向灯包括:根据所述方向盘转动角,确定所述车辆中车轮转向轴的转向角度;控制开启与所述转向角度对应的目标转向灯。3.根据权利要求2所述的方法,其特征在于,所述控制开启与所述转向角度对应的目标转向灯包括:若所述转向角度用于控制所述车轮转向轴左转,则控制开启所述车辆的左转灯;或者,若所述转向角度用于控制所述车轮转向轴右转,则控制开启所述车辆的右转灯。4.根据权利要求1所述的方法,其特征在于,所述根据所述方向盘转动角和所述当前车辆速度,计算所述车辆的预测轨道方向包括:根据所述方向盘转动角和所述当前车辆速度,从配置库中查询获得对应的所述预测轨道方向;其中,所述配置库中预先配置有不同车速、方向盘转角及轨道变化方向三者之间的映射关系。5.根据权利要求1所述的方法,其特征在于,所述根据所述方向盘转动角和所述当前车辆速度,计算所述车辆的预测轨道方向包括:根据预设的转向预测算法,对所述方向盘转动角和所述当前车辆速度进行预测计算,得到所述预测轨道方向。6.根据权利要求1所述的方法,其特征在于,所述确定所述预测轨道方向和所述前车车尾位置分别与所述车辆当前行驶的车道边线位置之间的交点之前,所述方法还包括:获取所述车辆的视频流;根据所述视频流,计算所述车辆当前行驶的车道边线位置及所述前车车尾位置。7.根据权利要求1-6中任一项所述的方法,其特征在于,所述方法还包括:在检测到所述车辆的方向盘复位后,重复执行所述获取所述车辆的方向盘转动角和当前车辆速度的步骤,直至所述车辆行车结束。8.一种转向灯控制装置,其特征在于,所述装置包括获取模块、计算模块、确定模块及控制模块,其中:所述获取模块,用于获取所述车辆的方向盘转动角和当前车辆速度;所述计算模块,用于根据所述方向盘转动角和所述当前车辆速度,计算所述车辆的预测轨道方向;所述确定模块,用于确定与所述车辆相邻的前车车尾位置;
所述确定模块,还用于确定所述预测轨道方向和所述前车车尾位置分别与所述车辆当前行驶的车道边线位置之间的交点,得到对应的第一交点和第二交点;所述控制模块,用于在所述第一交点和所述第二交点之间的间距超过预设行车间距时,根据所述方向盘转动角控制开启所述方向盘转动角对应的目标转向灯。9.一种终端设备,其特征在于,所述终端设备包括:处理器、存储器、通信接口和总线;所述处理器、所述存储器和所述通信接口通过所述总线连接并完成相互间的通信;所述存储器存储可执行程序代码;所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于执行如上权利要求1-7中任一项所述的转向灯控制方法。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有程序,当所述程序运行在终端设备时执行如上权利要求1-7中任一项所述的转向灯控制方法。
技术总结
本发明公开了一种转向灯控制方法、装置、终端设备及介质,所述方法包括:获取所述车辆的方向盘转动角和当前车辆速度;根据所述方向盘转动角和所述当前车辆速度,计算所述车辆的预测轨道方向;确定与所述车辆相邻的前车车尾位置;确定所述预测轨道方向和所述前车车尾位置分别与所述车辆当前行驶的车道边线位置之间的交点,得到对应的第一交点和第二交点;在所述第一交点和所述第二交点之间的间距超过预设行车间距时,根据所述方向盘转动角控制开启所述方向盘转动角对应的目标转向灯。采用本发明,能解决现有技术中驾驶员不打转向灯导致后车无法预判、出现交通事故等技术问题。出现交通事故等技术问题。出现交通事故等技术问题。
技术研发人员:万君彦
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:2022.01.19
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。