1.本发明涉及一种铺设设备,尤其涉及一种用于较深海域海底软质管道的铺设设备。
背景技术:
2.为了能使得海洋天然气能够外输,人们会在海底铺设管道,由于海洋底部环境多变,人们会利用铺设装置铺设管道,现有的铺设设备不能抵抗波浪、河流和风等环境因素,使得铺设管道效率低,并且现有的铺设设备还需人们潜入海底加以配合方可铺设成功,这样就耗费了人力,所以,人们需要设计一种铺设设备。
3.因此,特别需要设计一种自动下降的、自动移动的和自动固定的用于较深海域海底软质管道的铺设设备,以解决现有技术中存在的问题。
技术实现要素:
4.为了克服现有铺设设备需人工辅助的缺点,技术问题:提供一种自动下降的、自动移动的和自动固定的用于较深海域海底软质管道的铺设设备。
5.为实现上述目的,本发明提供如下技术方案:一种用于较深海域海底软质管道的铺设设备,包括有水箱、储料箱、压力传感器、盖板、卡位机构和下压固定机构,水箱上部设有储料箱,储料箱内底部设有压力传感器,储料箱上侧放置有盖板,水箱上设有卡位机构,卡位机构上设有下压固定机构。
6.可选地,卡位机构包括有第一固定架、固定块、滑动板、卡块、第一伸缩杆、第一弹簧和楔形块,水箱上设有第一固定架,第一固定架两部均设有固定块,两个固定块上均设有第一伸缩杆,两个第一伸缩杆上均设有楔形块,楔形块与同侧的固定块之间均连接有第一弹簧,第一弹簧绕在第一伸缩杆上,第一固定架上滑动式设有滑动板,滑动板两侧均设有卡块。
7.可选地,下压固定机构包括有第一电动推杆、第二伸缩杆、第二弹簧、推动块、推动架、滑杆、压块、u型槽、第三伸缩杆和第三弹簧,滑动板上安装有第一电动推杆,滑动板下侧均匀设有三个第二伸缩杆,三个第二伸缩杆之间连接有推动块,推动块与滑动板之间连接有第二弹簧,第二弹簧有三个,第二弹簧绕在第二伸缩杆上,第一电动推杆伸缩杆上连接有推动架,推动架两侧均滑动式设有滑杆,两个滑杆之间连接有压块,压块两侧均设有第三伸缩杆,两个第三伸缩杆之间连接有u型槽,u型槽与压块滑动式连接,推动块与u型槽滑动式连接,u型槽两侧与压块之间均连接有第三弹簧,第三弹簧绕在第三伸缩杆上。
8.可选地,还包括有下沉机构,下沉机构包括有移动块、第四伸缩杆、第四弹簧、浮力块、电磁阀、距离传感器和液位传感器,水箱内底部两侧均设有第四伸缩杆,两个第四伸缩杆上均设有移动块,两个移动块与水箱之间均连接有第四弹簧,第四弹簧绕在第四伸缩杆上,两个移动块下侧均设有浮力块,水箱底部设有电磁阀,水箱底部远离电磁阀的一侧设有距离传感器,水箱内设有液位传感器。
9.可选地,还包括有定位机构,定位机构包括有第二固定架、绕线轮、拉绳和第一减速电机,水箱上部远离储料箱的一侧设有第二固定架,第二固定架上转动式设有绕线轮,绕线轮上绕有拉绳,第二固定架上安装有第一减速电机,第一减速电机输出轴与绕线轮连接。
10.可选地,还包括有上浮机构,上浮机构包括有安装架、密封圈、放料筒、安装块、第二电动推杆、挡板和气囊,水箱两侧均设有安装架,两个安装架上侧均设有密封圈,两个密封圈上均设有放料筒,两个安装架上部均设有两个安装块,安装块有四个,同侧的两个安装块之间安装有第二电动推杆,两个第二电动推杆伸缩杆上均连接有挡板,挡板与同侧的安装架滑动式连接,两个安装架下侧均设有气囊。
11.可选地,还包括有移动机构,移动机构包括有安装杆、第三电动推杆、安装板、第二减速电机、转轴、叶片、第四电动推杆和顶板,水箱两侧均设有两个安装杆,安装杆有四个,同在一侧的两个安装杆上均安装有第三电动推杆,同在另一侧的两个安装杆上均安装有第四电动推杆,水箱两侧均设有两个安装板,同侧的两个安装板之间转动式设有转轴,两个转轴上均安装有第二减速电机,两个第二减速电机输出轴上均连接有叶片,第二减速电机两侧均设有顶板,顶板有四个。
12.可选地,还包括有控制箱,储料箱上安装有控制箱,控制箱内安装有开关电源、电源模块和控制模块,开关电源为本用于较深海域海底软质管道的铺设设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器、液位传感器和压力传感器均与控制模块通过电性连接,第一电动推杆、第二电动推杆、第三电动推杆、第四电动推杆、第二减速电机和电磁阀均与控制模块通过继电器控制模块连接,第一减速电机与控制模块通过直流电机正反转模块连接。
13.有益效果为:1、本发明通过将水箱放置在水面上,在水压和人力的作用下,移动块和浮力块向下移动,使得海水流入水箱内,随后在重力的作用下,水箱向下移动,实现了下降的效果,方便了对管道进行铺设;2、当水箱内的海水的液位达到预设值,同时水箱与海底的距离达到预设值时,第一电动推杆伸缩杆向前移动,使得u型钉向下移动将管道固定在海底,实现了固定的作用,节省了人力;3、根据系统程序的设定,使得第三电动推杆和第四电动推杆按照程序启动,从而使得转动叶片改变方向,实现了自动移动的效果。
附图说明
14.图1为本发明的第一视角立体结构示意图。
15.图2为本发明的第二视角立体结构示意图。
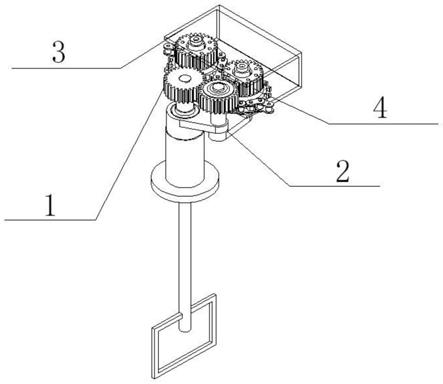
16.图3为本发明的部分立体结构示意图。
17.图4为本发明的卡位机构第一部分立体结构示意图。
18.图5为本发明的卡位机构第二部分立体结构示意图。
19.图6为本发明的下压固定机构第一部分立体结构示意图。
20.图7为本发明的下压固定机构剖视立体结构示意图。
21.图8为本发明的下压固定机构第二部分立体结构示意图。
22.图9为本发明的下沉机构第一部分立体结构示意图。
23.图10为本发明的下沉机构第二部分立体结构示意图。
24.图11为本发明的下沉机构剖视立体结构示意图。
25.图12为本发明的定位机构立体结构示意图。
26.图13为本发明的定位机构剖视立体结构示意图。
27.图14为本发明的上浮机构立体结构示意图。
28.图15为本发明的移动机构第一部分立体结构示意图。
29.图16为本发明的移动机构第二部分立体结构示意图。
30.图17为本发明的移动机构第三部分立体结构示意图。
31.图18为本发明的电路框图。
32.图19为本发明的电路原理图。
33.附图标记说明:1_水箱,2_储料箱,21_压力传感器,3_盖板,4_控制箱,5_卡位机构,51_第一固定架,52_固定块,53_滑动板,54_卡块,55_第一伸缩杆,56_第一弹簧,57_楔形块,6_下压固定机构,61_第一电动推杆,62_第二伸缩杆,63_第二弹簧,64_推动块,65_推动架,66_滑杆,67_压块,68_u型槽,69_第三伸缩杆,610_第三弹簧,7_下沉机构,71_移动块,72_第四伸缩杆,73_第四弹簧,74_浮力块,75_电磁阀,76_距离传感器,77_液位传感器,8_定位机构,81_第二固定架,82_绕线轮,83_拉绳,84_第一减速电机,9_上浮机构,91_安装架,92_密封圈,93_放料筒,94_安装块,95_第二电动推杆,96_挡板,97_气囊,10_移动机构,101_安装杆,102_第三电动推杆,103_安装板,104_第二减速电机,105_转轴,106_叶片,107_第四电动推杆,108_顶板。
具体实施方式
34.下面结合附图详细说明本发明的优选技术方案。
35.实施例1一种用于较深海域海底软质管道的铺设设备,如图1-19所示,包括有水箱1、储料箱2、压力传感器21、盖板3、卡位机构5和下压固定机构6,水箱1上部后侧设有储料箱2,储料箱2上侧放置有盖板3,储料箱2内底部设有压力传感器21,水箱1前侧设有卡位机构5,卡位机构5前侧设有下压固定机构6。
36.卡位机构5包括有第一固定架51、固定块52、滑动板53、卡块54、第一伸缩杆55、第一弹簧56和楔形块57,水箱1前侧设有第一固定架51,第一固定架51左右两部均设有固定块52,两个固定块52前侧均设有第一伸缩杆55,两个第一伸缩杆55前侧均设有楔形块57,楔形块57与同侧的固定块52之间均连接有第一弹簧56,第一弹簧56绕在第一伸缩杆55上,第一固定架51前侧滑动式设有滑动板53,滑动板53左右两侧均设有卡块54,卡块54与同侧的楔形块57配合。
37.下压固定机构6包括有第一电动推杆61、第二伸缩杆62、第二弹簧63、推动块64、推动架65、滑杆66、压块67、u型槽68、第三伸缩杆69和第三弹簧610,滑动板53前部安装有第一电动推杆61,滑动板53前部下侧均匀设有三个第二伸缩杆62,三个第二伸缩杆62前侧之间连接有推动块64,推动块64与滑动板53之间连接有第二弹簧63,第二弹簧63有三个,第二弹簧63绕在第二伸缩杆62上,第一电动推杆61伸缩杆上连接有推动架65,推动架65左右两侧
均滑动式设有滑杆66,两个滑杆66之间连接有压块67,压块67左右两侧均设有第三伸缩杆69,两个第三伸缩杆69之间连接有u型槽68,u型槽68与压块67滑动式连接,推动块64与u型槽68滑动式连接,u型槽68左右两侧与压块67之间均连接有第三弹簧610,第三弹簧610绕在第三伸缩杆69上。
38.还包括有下沉机构7,下沉机构7包括有移动块71、第四伸缩杆72、第四弹簧73、浮力块74、电磁阀75、距离传感器76和液位传感器77,水箱1内底部左右两侧均设有第四伸缩杆72,两个第四伸缩杆72上均设有移动块71,两个移动块71与水箱1之间均连接有第四弹簧73,第四弹簧73绕在第四伸缩杆72上,两个移动块71下侧均设有浮力块74,水箱1底部设有电磁阀75,水箱1底部前侧设有距离传感器76,水箱1内前侧设有液位传感器77。
39.还包括有定位机构8,定位机构8包括有第二固定架81、绕线轮82、拉绳83和第一减速电机84,水箱1上部前侧焊接有第二固定架81,第二固定架81上转动式设有绕线轮82,绕线轮82上绕有拉绳83,第二固定架81右侧安装有第一减速电机84,第一减速电机84输出轴与绕线轮82连接。
40.还包括有上浮机构9,上浮机构9包括有安装架91、密封圈92、放料筒93、安装块94、第二电动推杆95、挡板96和气囊97,水箱1左右两侧均设有安装架91,两个安装架91上侧均设有密封圈92,两个密封圈92上均设有放料筒93,两个安装架91上部后侧均设有两个安装块94,安装块94有四个,同侧的两个安装块94之间安装有第二电动推杆95,两个第二电动推杆95伸缩杆上均连接有挡板96,挡板96与同侧的安装架91滑动式连接,两个安装架91下侧均设有气囊97。
41.还包括有移动机构10,移动机构10包括有安装杆101、第三电动推杆102、安装板103、第二减速电机104、转轴105、叶片106、第四电动推杆107和顶板108,水箱1前部左右两侧均设有两个安装杆101,安装杆101有四个,同在右侧的两个安装杆101上均安装有第三电动推杆102,同在左侧的两个安装杆101上均安装有第四电动推杆107,水箱1前部左右两侧均设有两个安装板103,同侧的两个安装板103之间转动式设有转轴105,两个转轴105上均安装有第二减速电机104,两个第二减速电机104输出轴上均连接有叶片106,第二减速电机104左右两侧均设有顶板108,顶板108有四个,同在左侧的两个顶板108与第三电动推杆102伸缩杆配合,同在右侧的两个顶板108与第四电动推杆107伸缩杆配合。
42.还包括有控制箱4,储料箱2后部安装有控制箱4,控制箱4内安装有开关电源、电源模块和控制模块,开关电源为本用于较深海域海底软质管道的铺设设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器76、液位传感器77和压力传感器21均与控制模块通过电性连接,第一电动推杆61、第二电动推杆95、第三电动推杆102、第四电动推杆107、第二减速电机104和电磁阀75均与控制模块通过继电器控制模块连接,第一减速电机84与控制模块通过直流电机正反转模块连接。
43.当人们需要在海底铺设管道时,人们可以使用这种用于较深海域海底软质管道的铺设设备,首先人们手动搬动盖板3,将盖板3拿出,然后人们将绕卷完成的一整段管道放置在储料箱2内,将管道的一端穿过储料箱2,使得管道的一端位于滑动板53与u型槽68下侧,随后盖板3放置在储料箱2上,然后人们向后移动推动块64,从而使得第二伸缩杆62被压缩,使得第二弹簧63被压缩,随后将固定用的u型钉有序的放置在推动块64前侧并位于u型槽68
内,最前面的u型钉位于压块67下侧,随后人们将该设备放置在海面上,然后人们手动向下按压该设备,在水压的情况下,海水流入水箱1内,从而使得水箱1向下移动至海底,随后人们向下移动滑动板53,从而使得卡块54向下移动,当卡块54向下移动与楔形块57接触时,卡块54带动楔形块57向后移动,从而使得第一伸缩杆55被压缩,使得第一弹簧56被压缩,当卡块54向下移动远离楔形块57时,第一弹簧56复位带动楔形块57向前移动复位,从而使得第一伸缩杆55被拉伸,使得楔形块57将卡块54卡住,随后人们手动按下电源总开关,将本装置上电,使得控制模块控制第一电动推杆61伸缩杆向前伸长三秒后随即向后缩短三秒后关闭,第一电动推杆61伸缩杆带动推动架65向前移动,从而使得压块67向下移动,使得u型钉向下移动扎入海底,u型钉能够将管道固定在海底,进而使得第三伸缩杆69和第三弹簧610被拉伸,随后第一电动推杆61伸缩杆带动推动架65向后移动,从而使得压块67向上移动,第三伸缩杆69和第三弹簧610起缓冲的作用,此时第二弹簧63复位带动推动块64向前移动,第二伸缩杆62被拉伸,使得推动块64推动u型钉位于压块67下侧,随后人们向后移动该设备,使得储料箱2内的一小段管道被拉出,第一电动推杆61关闭二十秒后,控制模块再次控制第一电动推杆61伸缩杆向前伸长三秒后随即向后缩短三秒后关闭,如此循环,当压力传感器21感受不到管道的压力时,说明管道已铺设完成,此时u型钉已用完,使得第二弹簧63复位带动推动块64复位,从而使得第二伸缩杆62被拉伸,此时第一电动推杆61已是关闭状态将不在启动,随后人们再次按下电源总开关,将本装置断电,然后人们将该设备移动至陆地,使得水箱1内的水流出,随后人们向后移动楔形块57,使得第一弹簧56和第一伸缩杆55被压缩,然后人们向上移动滑动板53,从而使得卡块54向上移动,当卡块54向上移动远离楔形块57时,人们松开楔形块57,使得第一弹簧56复位带动楔形块57复位,从而使得第一伸缩杆55被拉伸。
44.人们手动向下按该设备时,在水压的作用下,移动块71和浮力块74向下移动,从而使得第四伸缩杆72被压缩,进而第四弹簧73被压缩,使得海水流入水箱1内,继而在重力的作用下该设备向下移动至海底,当液位传感器77感应到水箱1内的液位达到预设值时,同时距离传感器76与海底之间的距离达到预设值时,控制模块控制第一电动推杆61伸缩杆向前伸长三秒后随即向后缩短三秒后关闭,当压力传感器21感应不到压力时,控制模块控制电磁阀75启动,从而使得水箱1内的海水流出,进而该设备向海面上移动,当液位传感器77感应到水箱1内的液位低于预设值时,控制模块控制电磁阀75关闭,此时第四弹簧73复位带动移动块71和浮力块74向上移动,使得第四伸缩杆72被拉伸。
45.首先人们将拉绳83的一端固定,当该设备向下移动时,绕线轮82发生转动,当液位传感器77感应不到液位时,说明该设备已浮在海面上,使得控制模块控制第一减速电机84输出轴转动,从而使得绕线轮82转动将拉绳83绕在绕线轮82上,当该设备回到拉绳83固定端时,人们手动按下电源总开关将本装置断电,控制模块控制第一减速电机84关闭。
46.首先人们在放料筒93放入催化剂,将双氧水注入至气囊97内,当压力传感器21感应不到压力时,控制模块控制第二电动推杆95伸缩杆向外侧伸长三秒后关闭,第二电动推杆95伸缩杆带动挡板96向外侧移动,从而使得放料筒93内的催化剂落入双氧水,随后催化剂与双氧水发生反应,使得气囊97变大,进而该设备向上移动,当液位传感器77感应不到液位时,控制模块控制第二电动推杆95伸缩杆向内侧缩短三秒后关闭,第二电动推杆95伸缩杆带动挡板96向内侧移动,随后气囊97慢慢变小复位。
47.人们先设定该设备铺设管道线路的程序,当距离传感器76感应到与海底之间的距离达到预设值时,控制模块控制第二减速电机104输出轴转动,第二减速电机104输出轴带动叶片106转动,同时依照程序设定的线路调整第三电动推杆102和第四电动推杆107启动,当需要左转时,根据程序设定控制模块控制第三电动推杆102伸缩杆向前伸长程序设定的时间随即向后缩短程序设定的时间后关闭,第三电动推杆102伸缩杆带动顶板108运动,从而使得第二减速电机104和转轴105转动,使得该设备运动,当需要右转时,控制模块控制第四电动推杆107伸缩杆向前伸长程序设定的时间随即向后缩短程序设定的时间后关闭,第四电动推杆107伸缩杆带动顶板108反向运动,从而使得第二减速电机104和转轴105反向运动,使得该设备反向运动,随后当需要左转时,控制模块继续控制第三电动推杆102伸缩杆向前伸长程序设定的时间随即向后缩短程序设定的时间后关闭,如此循环,当压力传感器21感应不到压力时,控制模块控制第三电动推杆102伸缩杆和第四电动推杆107伸缩杆移动至初始位置后关闭,同时控制模块控制第二减速电机104关闭。
48.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。