多普勒处理,获得n个包含目标回波和杂波的距离-多普勒谱;
12.步骤六、利用恒虚警检测n个包含目标和杂波的距离-多普勒谱,获取n个包含目标的距离-多普勒单元的位置;
13.步骤七、利用压缩感知理论对n个包含目标的距离-多普勒单元的位置进行角度估计,获取目标的角度估计值;
14.步骤八、利用步骤三获取的n列杂波信号和步骤七获取的目标的角度估计值,采用空域滤波法,对步骤六获取的n个包含目标的距离-多普勒单元的位置进行滤波,获得目标信号。
15.进一步地,本发明中,步骤一中,对雷达n个通道接收的回波信号分别进行采样的方法为:
16.先对n个通道接收的回波信号分别进行混频、滤波,再进行正交双通道ad采样处理。
17.进一步地,本发明中,步骤二中,对每个通道的接收信号进行距离-多普勒处理的方法为:二维快速傅里叶变换。
18.进一步地,本发明中,步骤三中,n列杂波信号的第n列为:
[0019][0020]
其中,fn(k,m)表示第n列杂波信号,也是第n个通道接收的所有杂波点的和,其中,1≤n≤n,m代表第m个距离-多普勒单元,k表示距离-多普勒谱中的零多普勒频率对应的列数,d表示雷达相邻通道的距离,αh代表第h个杂波的复反射系数,h表示杂波的总数。
[0021]
进一步地,本发明中,步骤五中,获得的n个包含目标回波和杂波的距离-多普勒谱中的第n个通道的距离-多普勒谱为:
[0022][0023]
式中,为第n个通道的距离-多普勒谱,θ
μ
代表真实目标角度的估计值,β代表真实目标的复反射系数,δαh是复反射系数的扰动,λ发射信号波长。
[0024]
进一步地,本发明中,步骤六中,获取n个包含目标的距离-多普勒单元的位置的具体方法为:
[0025]
计算每个距离-多普勒单元的幅度s1,并将幅度s1与自身相邻的s个距离-多普勒谱单元幅度的平均值比较,当满足s1>γs2时,将幅度s1对应的距离-多普勒单元判定为包含目标单元,获取包含目标的距离-多普勒单元的位置,其中p
fa
代表虚警概率。
[0026]
进一步地,本发明中,步骤七中,获取目标的角度估计值的方法为:
[0027]
利用公式:
[0028]
[0029]
对目标的角度进行估计,式中,||
·
||1和||
·
||2分别代表向量的范数和范数,a(θ)代表阵列流型矩阵,θ=[θ0,
…
,θ
q-1
]
t
是角度抽样值构成的向量,a(θ)=[a(θ0),
…
,a(θ
q-1
)],其中a(θq)=[1,
…
,exp(j2π(n-1)dsinθq/λ)]
t
,0≤q≤q-1,q为角度抽样值的个数,其中,(p
t
,m
t
)为目标所处距离-多普勒单元位置,p
t
为目标所处多普勒单元位置,m
t
为目标所处距离单元的位置,为第0个通道接收的包含目标的距离-多普勒谱,第n-1个通道接收的包含目标的距离-多普勒谱,μ是一个q维的复数向量。
[0030]
进一步地,本发明中,步骤八中,获得目标信号的方法为:
[0031]
利用公式:
[0032][0033]
s.t. ah(θ
μ
)w=1
[0034]
求解目标的空域复加权向量w,所述w是n行1列的复向量;wh为向量w为共轭转置,fh(k,m
t
)为f(k,m
t
)的共轭转置,f(k,m
t
)=[f0(k,m
t
),
…
,f
n-1
(k,m
t
)]
t
,f(k,m
t
)为第m
t
个距离单元,第k个多普勒单元位置处杂波向量,其中,f0(k,m
t
)表示第0个雷达通道m
t
个距离单元,第k个多普勒单元位置处杂波信号,f
n-1
(k,m
t
)为表示第n-1个雷达通道m
t
个距离单元,第k个多普勒单元位置处杂波信号;a(θ
μ
)代表代表角度为θ
μ
的阵列导向矢量,ah(θ
μ
)为a(θ
μ
)的共轭转置;
[0035]
w=[fh(k,m
t
)f(k,m
t
)]-1
a(θ
μ
){ah(θ
μ
)[fh(k,m
t
)f(k,m
t
)]-1
a(θ
μ
)}-1
[0036]
再利用目标的空域复加权向量w和杂波单元抑制公式:
[0037][0038]
获取消除杂波后的目标回波信号,代表第m
t
个距离单元、第k个多普勒单元处对杂波抑制后的结果,第m
t
个距离单元,第k个多普勒单元位置处杂波和目标回波向量。
[0039]
本发明中充分应用了杂波信号的空域信息,从而提升了杂波抑制效果,避免了滤除目标的问题,相比传统mtd算法,而由于本发明算法仅处理杂波区域宽度为k的部分,因此并未影响目标的的强度,可以有效保留目标、且尽可能消除杂波干扰。
附图说明
[0040]
图1是本发明所述基于空域滤波的静止地物杂波对消方法的流程图;
[0041]
图2是杂波抑制前的时频图;
[0042]
图3是使用mtd算法抑制杂波的结果图;
[0043]
图4是采用本发明所述杂波抑制算法的结果图。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0046]
具体实施方式一:下面结合图1说明本实施方式,本实施方式所述基于空域滤波的静止地物杂波对消方法,包括:
[0047]
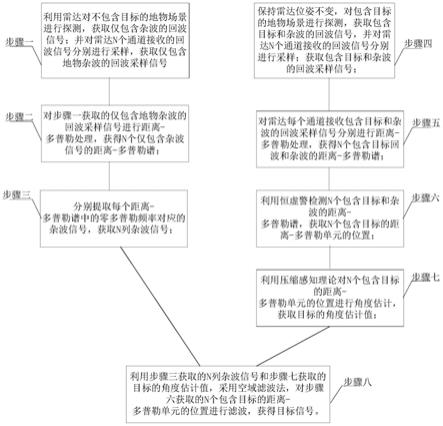
步骤一、利用雷达对不包含目标的地物场景进行探测,获取仅包含杂波的回波信号;并对雷达n个通道接收的回波信号分别进行采样,获取仅包含地物杂波的回波采样信号;
[0048]
对雷达n个通道接收的回波信号分别进行采样的方法为:
[0049]
先对n个通道接收的回波信号分别进行混频、滤波,再进行正交双通道ad采样处理;
[0050]
步骤二、对步骤一获取的仅包含地物杂波的回波采样信号进行距离-多普勒处理,获得n个仅包含杂波信号的距离-多普勒谱;
[0051]
对每个通道的接收信号进行距离-多普勒处理的方法为:二维快速傅里叶变换;
[0052]
步骤三、分别提取每个距离-多普勒谱中的零多普勒频率对应的杂波信号,获取n列杂波信号;
[0053]
n列杂波信号的第n列为:
[0054][0055]
其中,fn(k,m)表示第n列杂波信号,也是第n个通道接收的所有杂波点的和,其中,1≤n≤n,m代表第m个距离-多普勒单元,k表示距离-多普勒谱中的零多普勒频率对应的列数,d表示雷达相邻通道的距离,αh代表第h个杂波的复反射系数,h表示杂波的总数。
[0056]
步骤四、保持雷达位姿不变,对包含目标的地物场景进行探测,获取包含目标和杂波的回波信号,并对雷达n个通道接收的回波信号分别进行采样;获取包含目标和杂波的回波采样信号;
[0057]
步骤五、对雷达每个通道接收的包含目标和杂波的回波采样信号分别进行距离-多普勒处理,获得n个包含目标回波和杂波的距离-多普勒谱;
[0058]
n个包含目标回波和杂波的距离-多普勒谱中的第n个通道的距离-多普勒谱为:
[0059][0060]
式中,为第n个通道的距离-多普勒谱,θ
μ
代表真实目标角度的估计值,β代表真实目标的复反射系数,δαh是复反射系数的扰动,λ发射信号波长;
[0061]
步骤六、利用恒虚警检测n个包含目标和杂波的距离-多普勒谱,获取n个包含目标的距离-多普勒单元的位置;
[0062]
获取n个包含目标的距离-多普勒单元的位置的具体方法为:
[0063]
计算每个距离-多普勒单元的幅度s1,并将幅度s1与自身相邻的s个距离-多普勒谱单元幅度的平均值比较,当满足s1>γs2时,将幅度s1对应的距离-多普勒单元判定为包含目标单元,获取包含目标的距离-多普勒单元的位置,其中p
fa
代表虚警概率。
[0064]
步骤七、利用压缩感知理论对n个包含目标的距离-多普勒单元的位置进行角度估计,获取目标的角度估计值;
[0065]
获取目标的角度估计值的方法为:
[0066]
利用公式:
[0067][0068]
对目标的角度进行估计,式中,||
·
||1和||
·
||2分别代表向量的范数和范数,a(θ)代表阵列流型矩阵,θ=[θ0,
…
,θ
q-1
]
t
是角度抽样值构成的向量,a(θ)=[a(θ0),
…
,a(θ
q-1
)],其中a(θq)=
·
1,
…
,exp(j2π(n-1)dsinθq/λ)]
t
,0≤q≤q-1,q为角度抽样值的个数,其中,(p
t
,m
t
)为目标所处距离-多普勒单元位置,p
t
为目标所处多普勒单元位置,m
t
为目标所处距离单元的位置,为第0个通道接收的包含目标的距离-多普勒谱,第n-1个通道接收的包含目标的距离-多普勒谱,μ是一个q维的复数向量;
[0069]
步骤八、利用步骤三获取的n列杂波信号和步骤七获取的目标的角度估计值,采用空域滤波法,对步骤六获取的n个包含目标的距离-多普勒单元的位置进行滤波,获得目标信号;
[0070]
获得目标信号的方法为:
[0071]
利用公式:
[0072][0073]
s.t. ah(θ
μ
)w=1
[0074]
求解目标的空域复加权向量w,所述w是n行1列的复向量;wh为向量w为共轭转置,fh(k,m
t
)为f(k,m
t
)的共轭转置,f(k,m
t
)=[f0(k,m
t
),
…
,f
n-1
(k,m
t
)]
t
,f(k,m
t
)为第m
t
个距离单元,第k个多普勒单元位置处杂波向量,其中,f0(k,m
t
)表示第0个雷达通道m
t
个距离单元,第k个多普勒单元位置处杂波信号,f
n-1
(k,m
t
)为表示第n-1个雷达通道m
t
个距离单元,第k个多普勒单元位置处杂波信号;a(θ
μ
)代表代表角度为θ
μ
的阵列导向矢量,ah(θ
μ
)为a(θ
μ
)的共轭转置;
[0075]
w=[fh(k,m
t
)f(k,m
t
)]-1
a(θ
μ
){ah(θ
μ
)[fh(k,m
t
)f(k,m
t
)]-1
a(θ
μ
)}-1
[0076]
再利用目标的空域复加权向量w和杂波单元抑制公式:
[0077][0078]
获取消除杂波后的目标回波信号,代表第m
t
个距离单元、第k个多普勒单元处对杂波抑制后的结果,第m
t
个距离单元,第k个多普勒单元位置处杂波和目标
回波向量。
[0079]
发明所述方法提出了一种具有杂波先验的、基于空域滤波算法的静止地物杂波抑制方法,具体表现为可以在杂波污染目标时,仍能保留目标、滤除杂波。
[0080]
图2给出了杂波抑制前的时频图,横轴代表时间,纵轴代表目标的速度。杂波出现在速度为0的位置,在图2中表现为时频图中心的一条横线,即任何时刻都存在地物杂波,杂波在时间维不可区分。目标出现在负速度处,代表目标原理雷达运动。在0.5秒处,目标速度为0,与杂波重合,此时目标和杂波不可区分。同时,在1.1秒、1.7秒、2.2秒、2.7秒、3.3秒和3.9秒处可见目标运动的多普勒也与杂波重合,如果不进行杂波抑制,杂波和目标将不可区分,严重影响对时频图的识别分类。
[0081]
图3给出了使用mtd算法抑制杂波的结果。mtd算法利用相邻脉冲对消速度为0的区域,可以明显观察到速度为0的区域产生了很深的零陷,杂波被完全消除了。然而,根据上文分析,由于目标和杂波存在多出重合,因此mtd算法同样消除了多处目标。在3.3秒和3.9秒,可以明显观察到mtd减弱了目标强度,3.3秒处目标损失了35db的强度,3.9秒处目标损失了26db的信噪比。从整体上看,目标的大部分范围被抑制,减少了目标的有效信息量。
[0082]
图4给出本发明杂波抑制算法的结果。与图1对比,速度为0的强杂波被有效地抑制,与图2对比,本发明方法还有效保留了目标信息。经过验证,杂波被抑制了20db到30db,而由于本发明算法仅处理杂波区域宽度为k的部分,因此并未影响目标的的强度,相比传统mtd算法,本发明算法在保留目标信息的角度上具有极大的优势。
[0083]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。