1.本发明涉及计量技术领域,尤指一种双称重体积和密度测量方法。
背景技术:
2.基于流体静力学浮力测量经典理论的液体静力比较法是砝码体积测量的参考方法。空气和液体两种流体接近1000倍的密度差保障了较高的体积测量精度,但液体介质的不稳定性和腐蚀性物理缺陷导致该方法存在难以解决的技术问题。
3.如何基于流体静力学浮力测量原理本质在单空气流体中实现双称重体积测量技术。它对基于砝码体积的空气浮力误差精确修正具有重要影响,对保证量子基准时期标准砝码真空和空气中质量量值一致性有着实际意义。
技术实现要素:
4.本发明的目的是提供一种双称重体积和密度测量方法,构建双称重体积测量模型以获得被测砝码体积和密度。
5.本发明提供的技术方案如下:
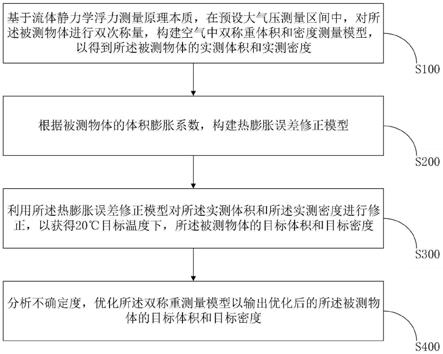
6.本发明提供一种双称重体积和密度测量方法,包括步骤:基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被测物体的实测体积和实测密度;
7.根据被测物体的体积膨胀系数,构建热膨胀误差修正模型;
8.利用所述热膨胀误差修正模型对所述实测体积和所述实测密度进行修正,以获得20℃目标温度下,所述被测物体的目标体积和目标密度;
9.分析不确定度,优化所述双称重测量模型以输出优化后的所述被测物体的目标体积和目标密度。
10.在一些实施例中,基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被测物体的实测体积和实测密度之前,还包括:
11.获取空气密度综合误差相对较小的大气压可靠变化区间;
12.在大气压可靠变化区间内选择两个不同的大气压,对所述被测物体进行测量;
13.获取两个不同气压下,所述被测物体双次称量的质量。
14.在一些实施例中,所述基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被测物体的实测体积和实测密度,包括:
15.当所述被测物体的质量处于第一质量区间时,在第一大气压下,通过空气静力学浮力测量原理,测得第一气压对应的空气密度下,被测物体和标准物体之间的表观质量差:m
t-mr=(v
t-vr)ρ
a1
δm1;
16.其中,mr、vr分别为标准物体的质量和体积,m
t
、v
t
分别为被测物体的质量和体积,
ρ
a1
为第一气压对应的空气密度,δm1表示在第一气压对应的空气密度下的被测物体与标准物体的质量差;
17.调整测量时的气压至第二气压,通过空气静力学浮力测量原理,测得第二气压对应的空气密度下,被测物体和标准物体之间的表观质量差:m
t-mr=(v
t-vr)ρ
a2
δm2;
18.其中,mr、vr分别为标准物体的质量和体积,m
t
、v
t
分别为被测物体的质量和体积,ρ
a2
为第二气压对应的空气密度,δm2表示在第二气压对应的空气密度下的被测物体与标准物体的质量差;
19.通过双称重测量模型根据所述被测物体和标准物体的质量差,计算所述被测物体和所述标准物体的体积差;
20.基于所述体积差和所述标准物体的体积,得到所述被测物体的实测体积;
21.根据所述被测物体的质量和所述被测物体的实测体积,获得所述被测物体的实测密度。
22.在一些实施例中,通过所述双称重测量模型计算所述实测体积:
[0023][0024]
通过所述双称重测量模型计算所述实测密度:
[0025][0026]
其中,δm1和δm2分别表示在第一气压对应的空气密度和第二气压对应的空气密度下的被测物体与标准物体的质量差;vr和v
t
分别是标准物体和被测物体的实测体积;ρ0是参考密度;ρc是被测物体的材料密度;ρ
a1
和ρ
a2
分别为第一气压和第二气压对应的空气密度。
[0027]
在一些实施例中,所述热膨胀误差修正模型,包括:
[0028]
体积热膨胀误差修正模型:
[0029][0030]
密度热膨胀误差修正模型:
[0031]
ρ(t
eff
)=ρ(t
mea
)
×
[1 γ(t
mea-t
ref
)];
[0032]
其中:ρ(t
eff
)、v
eff
分别是目标温度时被测物体的目标密度、目标体积;ρ(t
mea
)、v
mea
分别是被测物体的实测密度、实测体积;t
mea
是测量时的实际温度;t
ref
是目标温度;γ是被测物体的体积膨胀系数。
[0033]
在一些实施例中,所述利用所述热膨胀误差修正模型对所述实测体积和所述实测密度进行修正,以获得所述被测物体的目标体积和目标密度,包括:
[0034]
通过以下公式对处于第一质量区间的所述被测物体的实测体积和实测密度进行修正:
[0035]
[0036][0037]
其中,v
t.eff
是所述被测物体的目标体积;v
r.eff
是目标温度下静水力学法测得的标准物体的体积;ρ
t.eff
是所述被测物体的目标密度。
[0038]
在一些实施例中,所述在所述预设大气压测量区间中,对所述被测物体进行双次测量,以得到所述被测物体的实测体积和实测密度,包括:
[0039]
当所述被测物体的质量处于第二质量区间时,将支撑物体和标准物体在不同空气密度下进行比较称重,以获得所述支撑物体和所述标准物体的体积差;
[0040]
将所述被测物体放置于所述支撑物体,并在所述不同空气密度下与所述标准物体进行比较称重,以获得所述支撑物体和所述被测物体组合与所述标准物体的体积差;
[0041]
基于所述支撑物体和所述标准物体的体积差,以及所述支撑物体和所述被测物体组合与所述标准物体的体积差,计算获得所述被测物体的实测体积;
[0042]
其中,所述第一质量区间的最小值大于所述第二质量区间的最大值。
[0043]
在一些实施例中,所述利用所述热膨胀误差修正模型对所述实测体积和所述实测密度进行修正,以获得所述被测物体的目标体积和目标密度,其中,所述热膨胀误差修正模型为:
[0044][0045][0046]
其中,δm1和δm2是不同空气密度下支撑物体与标准物体之间的质量差,δm3和δm4是不同密度下支撑物体与被测物体的质量和与所述标准物体的差值,ρ
a1
和ρ
a3
表示第一气压对应的空气密度,ρ
a2
和ρ
a4
表示第二气压对应的空气密度;t
mea43
为支撑物体和被测物体组合与标准物体比较测量时的温度,t
mea21
为支撑物体与标准物体比较测量时的温度。
[0047]
在一些实施例中,所述分析不确定度,优化所述双称重测量模型以输出优化后的所述被测物体的目标体积和目标密度,其中,通过以下公式计算处于第一质量区间的被测物体的体积测量的不确定度:
[0048][0049]
其中,不同大气压下,被测物体与标准物体双次称量的质量差测量不确定度分别为u(δm1)和u(δm2);空气密度测量不准引入的不确定度u(ρ
a1
)和u(ρ
a2
);被测物体的体积热膨胀系数引入的不确定度u(γ);标准物体的体积测量不确定度u(vr);所述被测物体的体积测量不确定度u(v
t
)。
[0050]
在一些实施例中,所述分析不确定度,优化所述双称重测量模型以输出优化后的所述被测物体的目标体积和目标密度,其中,计算所述处于第二质量区间的被测物体的体积测量的不确定度包括:
[0051]
通过两个标准物体在不同空气密度下进行比较,以获取被测物体与标准物体的质
量差测量不确定度;
[0052]
通过被测物体和支撑物体、与所述标准物体在不同空气密度下进行比较,以获取所述支撑物体和所述被测物体组合、与所述标准物体的质量差测量不确定度;
[0053]
通过以下公式计算所述处于第二质量区间的被测物体的体积测量的不确定度:
[0054][0055]
其中,不同大气压下,支撑物体与标准物体双次称量的质量差测量不确定度分别为u(δm1)和u(δm2);支撑物体和被测物体组合与标准物体双次称量的质量差测量不确定度分别为u(δm3)和u(δm4);支撑物体与标准物体比较测量时,空气密度测量不准引入的不确定度u(ρ
a1
)和u(ρ
a2
);支撑物体和被测物体组合与标准物体比较测量时,空气密度测量不准引入的不确定度u(ρ
a3
)和u(ρ
a4
);被测物体的体积热膨胀系数引入的不确定度u(γ);质量比较仪线性误差引入的测量不确定度u
linearity
;所述被测物体的体积测量不确定度u(v
t
)。;所述支撑物体和所述被测物体组合、与所述标准物体的质量差。
[0056]
本发明提供的一种双称重体积和密度测量方法,至少具有以下技术效果:
[0057]
1)基于流体静力学浮力测量原理本质,在单空气流体中实现双称重体积测量技术。
[0058]
2)基于双称重体积测量原理,采用最小二乘法拟合不同规格、不同材质砝码体积测量结果随空气密度变化曲线,并采用砝码体积热膨胀误差修正关键技术,构建双称重体积测量热膨胀误差修正模型。
[0059]
3)采用不确定度交叉评估和比对验证相结合的关键技术,揭示测量模型各输入量对测量结果的影响机理,提出关键影响量误差补偿方法,实现测量模型的优化。
附图说明
[0060]
下面将以明确易懂的方式,结合附图说明优选实施方式,对本方案的上述特性、技术特征、优点及其实现方式予以进一步说明。
[0061]
图1是本发明实施例的一种双称重体积和密度测量方法的整体流程示意图;
[0062]
图2是本发明实施例的步骤s200的一个实施方式的示意图;
[0063]
图3是本发明实施例的步骤s200的一个实施方式的示意图。
具体实施方式
[0064]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
[0065]
为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
[0066]
在一个实施例中,如图1所示,本发明提供一种双称重体积和密度测量方法,包括步骤:
[0067]
s100基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被测物体的实测体积和实测密度。
[0068]
具体的,预设大气压测量区间是本实施例利用模型实验分析技术揭示大气压对空气密度的影响机理。
[0069]
在本实施例中,通过表面解吸模型实验分析技术阐明双称重体积测量中砝码表面解吸误差随气压变化的机制,结合中瑞联合实验研究基础,揭示大气压对空气密度的影响机理,为建立可靠的大气压测量区间提供理论基础,保障空气密度精确测量。
[0070]
示例性的,为了获得较高的不确定度,本实施例中采用了以下设备:
[0071]
(1)置于空气密封舱内,实际分度值为10μg的质量比较仪ax1005。空气密封舱与高精度的气泵相连,用以调节密封舱中的气压。
[0072]
(2)高精度环境控制设备。例如20℃
±
0.1℃的温度计,相对湿度波动小于10%的湿度计和分度值为0.6hpa的气压计。
[0073]
(3)已知质量和密度的标准砝码。为了研究不同材料标准对空气中双称量法体积测量不确定度的影响,在1kg砝码体积测量过程中,本实施例中分别采用不锈钢砝码、硅球和铂铱合金砝码作为标准。
[0074]
s200根据被测物体的体积膨胀系数,构建热膨胀误差修正模型。
[0075]
具体的,被测物体包括被测砝码,被测砝码是通过金属材料制成,根据金属材料的热膨胀机制,利用材料线膨胀系数推导其体积膨胀系数,提出砝码体积热膨胀误差补偿算法。基于材料热膨胀机制创新构建双称重体积测量法热膨胀误差修正模型。
[0076]
s300利用所述热膨胀误差修正模型对所述实测体积和所述实测密度进行修正,以获得20℃目标温度下,所述被测物体的目标体积和目标密度。
[0077]
示例性的,在本实施例中,基于单空气流体双密度重复称量理论假设,创新构建砝码双称重体积测量法热膨胀误差修正模型,修正实际温度下测得的砝码体积,以获得20℃标准温度下砝码体积,实现高精度体积测量新方法研究。
[0078]
s400分析不确定度,优化双称重测量模型以输出优化后的被测物体的目标体积和目标密度。
[0079]
具体的,在本实施例中,基于gum不确定度评估实现模型优化。
[0080]
示例性的,采用gum不确定度评估技术,开展双称重体积热膨胀误差修正模型的不确定度研究,提出双称重体积热膨胀误差修正模型不确定度评估新方法,揭示空气密度、比较仪计量特性、热膨胀影响和测量重复性等不确定度输入量的分散性、相关性和对测量结果的影响机理。
[0081]
其中,空气中双称量法也是基于阿基米德定律的体积测量方法,它无需将砝码浸入水中,可以直接测量砝码体积和质量。相比于静水力学法,它是高效、清洁的测量方法。
[0082]
在一个实施例中,在基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被
测物体的实测体积和实测密度之前,还包括:
[0083]
获取空气密度综合误差相对较小的大气压可靠变化区间。
[0084]
在大气压可靠变化区间内选择两个不同的大气压,对所述被测物体进行测量。
[0085]
获取两个不同气压下,所述被测物体双次称量的质量。
[0086]
在一个实施例中,如图2所示,所述基于流体静力学浮力测量原理本质,在预设大气压测量区间中,对所述被测物体进行双次称量,构建空气中双称重体积和密度测量模型,以得到所述被测物体的实测体积和实测密度,包括:
[0087]
s110当所述被测物体的质量处于第一质量区间时,在第一大气压下,通过空气静力学浮力测量原理,测得第一气压对应的空气密度下,被测物体和标准物体之间的表观质量差:m
t-mr=(v
t-vr)ρ
a1
δm1。
[0088]
其中,mr、vr分别为标准物体的质量和体积,m
t
、v
t
分别为被测物体的质量和体积,ρ
a1
为第一气压对应的空气密度,δm1表示在第一气压对应的空气密度下的被测物体与标准物体的质量差。
[0089]
s111调整测量时的气压至第二气压,通过空气静力学浮力测量原理,测得第二气压对应的空气密度下,被测物体和标准物体之间的表观质量差:m
t-mr=(v
t-vr)ρ
a2
δm2。
[0090]
其中,mr、vr分别为标准物体的质量和体积,m
t
、v
t
分别为被测物体的质量和体积,ρ
a2
为第二气压对应的空气密度,δm2表示在第二气压对应的空气密度下的被测物体与标准物体的质量差。
[0091]
s112通过双称重测量模型根据所述被测物体和标准物体的质量差,计算所述被测物体和所述标准物体的体积差。
[0092]
s113基于所述体积差和所述标准物体的体积,得到所述被测物体的实测体积。
[0093]
s114根据所述被测物体的质量和所述被测物体的实测体积,获得所述被测物体的实测密度。
[0094]
具体的,第一质量区间为20g~1kg,当被测砝码的质量处于20g~1kg时,通过双称重测量模型测量实测体积和实测密度。
[0095]
在一个实施例中,通过所述双称重测量模型计算所述实测体积:
[0096][0097]
通过所述双称重测量模型计算所述实测密度:
[0098][0099]
其中,δm1和δm2分别表示在第一气压对应的空气密度和第二气压对应的空气密度下的被测物体与标准物体的质量差;vr和v
t
分别是标准物体和被测物体的实测体积;ρ0是参考密度;ρc是被测物体的材料密度;ρ
a1
和ρ
a2
分别为第一气压和第二气压对应的空气密度。
[0100]
具体的,空气双称重技术是在不同的空气密度下进行折算质量测量。根据被测砝码和标准砝码之间的表观质量差,计算两者间的体积差,如公式(2.2.2-19)所示。当已知参考砝码体积vr时,就可以测定被测砝码体积v
t
。
[0101][0102]
其中:mr和m
t
分别为标准砝码和被测砝码的真空质量,vr和v
t
分别是标准砝码和被测砝码的体积,δm1和δm2分别表示在第一气压对应的空气密度和第二气压对应的空气密度下,被测砝码与标准砝码的折算质量差,ρ0是参考密度1.2kg/m3,ρc是假定砝码材料密度8000kg/m3,ρ
a1
和ρ
a2
分别为测量的第一气压和第二气压对应的空气密度。
[0103]
在一个实施例中,热膨胀误差修正模型,包括:
[0104]
体积热膨胀误差修正模型:
[0105][0106]
密度热膨胀误差修正模型:
[0107]
ρ(t
eff
)=ρ(t
mea
)
×
[1 γ(t
mea-t
ref
)]。
[0108]
其中:ρ(t
eff
)、v
eff
分别是目标温度时被测物体的目标密度、目标体积;ρ(t
mea
)、v
mea
分别是被测物体的实测密度、实测体积;t
mea
是体积测量时的实际温度;t
ref
是目标温度;γ是被测物体的体积膨胀系数。
[0109]
在一个实施例中,所述利用所述热膨胀误差修正模型对所述实测体积和所述实测密度进行修正,以获得所述被测物体的目标体积和目标密度,包括:
[0110]
通过以下公式对处于第一质量区间的所述被测物体的实测体积和实测密度进行修正:
[0111][0112][0113]
其中,v
t.eff
是所述被测物体的目标体积;v
r.eff
是目标温度下静水力学法测得的标准物体的体积;ρ
t.eff
是所述被测物体的目标密度。
[0114]
在一个实施例中,如图3所示,所述在所述预设大气压测量区间中,对所述被测物体进行双次测量,以得到所述被测物体的实测体积和实测密度,包括:
[0115]
s120当所述被测物体的质量处于第二质量区间时,将支撑物体和标准物体在不同空气密度下进行比较称重,以获得所述支撑物体和所述标准物体的体积差。
[0116]
s121将所述被测物体放置于所述支撑物体,并在所述不同空气密度下与所述标准物体进行比较称重,以获得所述支撑物体和所述被测物体组合与所述标准物体的体积差。
[0117]
s122基于所述支撑物体和所述标准物体的体积差,以及所述支撑物体和所述被测物体组合与所述标准物体的体积差,计算获得所述被测物体的实测体积。
[0118]
其中,所述第一质量区间的最小值大于所述第二质量区间的最大值。
[0119]
具体的,第二质量区间为≤10g,第一质量区间为20g~1kg。
[0120]
其中,支撑物体为支撑砝码,标准物体为标准砝码。
[0121]
在一个实施例中,所述利用所述热膨胀误差修正模型对所述实测体积和所述实测
密度进行修正,以获得所述被测物体的目标体积和目标密度,其中,所述热膨胀误差修正模型为:
[0122][0123][0124]
其中,δm1和δm2是不同空气密度下支撑物体与标准物体之间的质量差,δm3和δm4是不同密度下支撑物体与被测物体的质量和与所述标准物体的差值,ρ
a1
和ρ
a3
表示第一气压对应的空气密度,ρ
a2
和ρ
a4
表示第二气压对应的空气密度;t
mea43
为支撑物体和被测物体组合与标准物体比较测量时的温度,t
mea21
为支撑物体与标准物体比较测量时的温度。
[0125]
在一些实施例中,所述分析不确定度,优化所述双称重测量模型以输出优化后的所述被测物体的目标体积和目标密度,其中,通过以下公式计算处于第一质量区间的被测物体的体积测量的不确定度:
[0126][0127]
其中,不同大气压下,被测物体与标准物体双次称量的质量差测量不确定度分别为u(δm1)和u(δm2);空气密度测量不准引入的不确定度u(ρ
a1
)和u(ρ
a2
);被测物体的体积热膨胀系数引入的不确定度u(γ);标准物体的体积测量不确定度u(vr);所述被测物体的体积测量不确定度u(v
t
)。
[0128]
在一个实施例中,所述分析不确定度,优化所述双称重测量模型以输出优化后的所述被测物体的目标体积和目标密度,其中,计算所述处于第二质量区间的被测物体的体积测量的不确定度包括:
[0129]
通过两个标准物体在不同空气密度下进行比较,以获取被测物体与标准物体的质量差测量不确定度。
[0130]
通过被测物体和支撑物体、与所述标准物体在不同空气密度下进行比较,以获取所述支撑物体和所述被测物体组合、与所述标准物体的质量差测量不确定度。
[0131]
通过以下公式计算所述处于第二质量区间的被测物体的体积测量的不确定度:
[0132][0133]
其中,不同大气压下,支撑物体与标准物体双次称量的质量差测量不确定度分别为u(δm1)和u(δm2);支撑物体和被测物体组合与标准物体双次称量的质量差测量不确定度分别为u(δm3)和u(δm4);支撑物体与标准物体比较测量时,空气密度测量不准引入的不确定度u(ρ
a1
)和u(ρ
a2
);支撑物体和被测物体组合与标准物体比较测量时,空气密度测量不准引入的不确定度u(ρ
a3
)和u(ρ
a4
);被测物体的体积热膨胀系数引入的不确定度u(γ);质量比较仪线性误差引入的测量不确定度u
linearity
;所述被测物体的体积测量不确定度u(v
t
)。所述支撑物体和所述被测物体组合、与所述标准物体的质量差。
[0134]
在一个实施例中,本发明提供一种双称重体积和密度测量方法,具体包括:
[0135]
单空气流体小密度变化区间内双称重体积/密度测量技术(简称:空气双称重技术)本质上是一种特殊的静水力学法,它将介质水更换成了空气。静水力学法中,砝码从空气浸入水中,两种介质的密度差约为1000倍。但是在空气中双称量法中,砝码从一种密度的空气浸入另一种密度的空气,两种介质密度差一般不大于40%。随着介质密度差的减小,如空气浮力、吸附作用等对测量结果的影响逐渐显现。
[0136]
空气双称重技术是在不同的空气密度下进行折算质量测量。根据被测砝码和标准砝码之间的表观质量差,计算两者间的体积差,如公式(2.2.2-19)所示。当已知参考砝码体积vr时,就可以测定被测砝码体积v
t
。
[0137][0138]
其中:mr和m
t
分别为标准砝码和被测砝码的真空质量,vr和v
t
分别是标准砝码和被测砝码的体积,δm1和δm2分别表示在第一气压对应的空气密度和第二气压对应的空气密度下,被测砝码与标准砝码的折算质量差,ρ0是参考密度1.2kg/m3,ρc是假定砝码材料密度8000kg/m3,ρ
a1
和ρ
a2
分别为测量的第一气压和第二气压对应的空气密度。
[0139]
如公式(2.2.2-19)所示,在空气双称重技术中,若不考虑其他影响量,砝码间的真空质量差与空气密度差成线性变化,斜率为(v
r-v
t
)。根据这一特性,当已知标准砝码体积vr时,就可以测定被测砝码体积v
t
。根据线性公式的性质,斜率(v
r-v
t
)的测量准确度随截距(ρ
a2-ρ
a1
)正向变化。因此,想要获得精准的体积差,就需要两次称量的空气密度差尽量大。但是实际测量中,空气密度差并不可能无限放大。因为随着空气气压的降低,砝码表面的解吸作用逐渐明显,从而影响测量结果。空气双称重技术砝码体积/密度测量中,若想获得较佳的测量不确定度,首先必须确定一个合适的空气密度变化范围。
[0140]
(1)空气密度变化范围的确定
[0141]
空气双称重技术两次测量的空气密度值相差越大,其测得的体积值越接近静水力学法的测量结果。但是空气气压也不是任意变化的,随着气压的降低,砝码表面的污染物和水汽随着周围压力的减小而解吸,解吸作用逐渐成为测量结果的主要影响量。而且,由于空气密度通常依据cipm-2007推荐公式计算,空气气压的变化范围也受推荐公式适用范围限制。综述上述,空气双称重技术的合适气压变化比率为20%左右。而在这个范围内的吸附作用影响经实验研究可以忽略不计。
[0142]
(2)热膨胀修正
[0143]
由于材料的热膨胀,砝码的体积随着温度的变化而变化。为了保证体积值的统一,oimlr111规定砝码的体积为20℃的体积。但是实际体积测量过程中,实验室温度偏离20℃。因此,需要根据如下公式对被测砝码的体积进行温度修正,即将实测体积或密度转化为20℃时的体积或密度。
[0144][0145]
ρ(t
eff
)=ρ(t
mea
)
×
[1 γ(t
mea-t
ref
)];公式(2.2.2-12)
[0146]
其中:ρ(t
eff
)、v
eff
分别是目标温度时被测物体的目标密度、目标体积;ρ(t
mea
)、v
mea
分别是被测物体的实测密度、实测体积;t
mea
是测量时的实际温度;t
ref
是目标温度;γ是被测物体的体积膨胀系数。例如:不锈钢材料的线膨胀系数(cte)为每米0.016mm/℃,其体积膨胀系数为γ=(1 1.6
×
10
–5)3≈4.8
×
10
–5m3/℃。
[0147]
(3)20g~1kg砝码体积测量
[0148]
空气双称重技术本质上是将介质从水变成空气的特殊的静水力学法,它同样基于阿基米德定律。公式(2.2.2-19)已经给出了体积测量的基本公式。但是该公式没有考虑砝码的热膨胀。结合砝码体积热膨胀公式(2.2.2-12),公式(2.2.2-19)可以转化为:
[0149][0150]
其中:δm1和δm2分别是不同空气密度下测得的被测砝码和标准砝码之间的质量差,ρ
a1
和ρ
a2
分别为起始环境气压下的空气密度和气压下降20%后的空气密度,v
r.eff
表示20℃下静水力学法测得的标准砝码体积。
[0151]
(4)小于10g的砝码的体积测量
[0152]
但是当小于10g的砝码进行空气中双称量法体积测量时,由于砝码底面积太小,难以直接放在at106质量比较仪秤盘上,因此,在测量过程中采用100g不锈钢圆柱体砝码作为支撑砝码。以1g砝码的体积测量为例:
[0153]
首先,支撑砝码与100g标准砝码在不同空气密度下进行比较称量,以获得支撑砝码与标准砝码之间的体积差δv
sup-ref
。然后将1g的被测砝码放置于支撑砝码上再与同一标准砝码在不同空气密度下进行比较称量,以获得支撑砝码和被测砝码的体积与标准砝码体积的差值(v1 δv
sup-ref
)。通过第一步测得的δv
sup-ref
值获得1g砝码的体积值。
[0154]
1g~10g砝码的空气中双称量法体积测量公式如公式(2.2.2-21)所示。
[0155][0156]
其中:δm1和δm2是不同空气密度下两个100g砝码之间的质量差,δm3和δm4是不同密度下支撑砝码与被测砝码的质量和与标准100g砝码的差值,ρ
a1
和ρ
a3
表示实验室正常气压下的空气密度,ρ
a2
和ρ
a4
表示气压下降20%后的空气密度。
[0157]
(5)20g~1kg砝码密度测量
[0158][0159]
其中:m
t
为被测砝码质量值,δm1和δm2分别是不同空气密度下测得的被测砝码和标准砝码之间的质量差,ρ
a1
和ρ
a2
分别为起始环境气压下的空气密度和气压下降20%后的空气密度,v
r.eff
表示20℃下静水力学法测得的标准砝码体积。
[0160]
(6)小于10g的砝码的密度测量
[0161]
1g~10g砝码的空气中双称量法体积测量公式如公式(2.2.2-23)所示。
[0162][0163]
其中:m
t
为被测砝码质量值,δm1和δm2是不同空气密度下两个100g砝码之间的质
量差,δm3和δm4是不同密度下支撑砝码与被测砝码的质量和与标准100g砝码的差值,ρ
a1
和ρ
a3
表示实验室正常气压下的空气密度,ρ
a2
和ρ
a4
表示气压下降20%后的空气密度。
[0164]
值得注意的是,在空气中双称量法体积测量中,当比较仪密封舱内气压发生改变后,需要等待一段时间,待密封舱内的气压趋于稳定后才能开始测量。这个时间视密封舱和气泵的性能而异,一般为3小时。
[0165]
2.2.4不确定度评定
[0166]
(1)20g~1kg砝码体积测量不确定度评定
[0167]
根据公式(2.2.2-20)的数学模型,空气中双称量法的不确定度来源主要有:
[0168]
·
不同空气密度下,被测砝码与标准砝码质量差测量不确定度u(δm1),u(δm2)。该不确定度分量包含测量过程的重复性,质量比较仪引入的不确定度和空气浮力引入的不确定度。天平的线性误差引入的相对不确定度在相同标称值砝码的比较测量中,一般只有10-11
,可以忽略不计。
[0169]
·
不同气压下,空气密度测量不准引入的不确定度u(ρ
a1
),u(ρ
a2
)。由于空气密度均基于cipm-2007推荐公式计算,因此u(ρ
a1
),u(ρ
a2
)全相关。
[0170]
·
被测砝码体积热膨胀系数引入的不确定度u(γ)。
[0171]
·
标准砝码体积测量不确定度u(vr)。
[0172]
不考虑其他分量之间的相关性,空气中双称量法体积测量的合成标准不确定度为:
[0173][0174]
其中:
[0175][0176][0177]
(2)小于10g砝码体积测量不确定度评定
[0178]
根据公式(2.2.2-21)的数学模型,小于10g砝码体积的测量实际上由两次空气中双称量法组成。
[0179]
第一次是两个100g砝码在不同空气密度u(ρ
a1
),u(ρ
a2
)下比较,获得u(δm1),u(δm2)。
[0180]
第二次是被测砝码和100g支撑砝码与100g标准砝码在不同空气密度u(ρ
a3
),u(ρ
a4
)下比较,获得u(δm3),u(δm4)。
[0181]
被测砝码的体积为两次双称量法体积测量结果的差值,因此,在这个数学模型中,标准砝码的体积测量不确定度不重要了。
[0182]
不确定度主要与测量过程的不确定度u(δm1),u(δm2),u(δm3),u(δm4),和空气密度测量不确定度u(ρ
a1
),u(ρ
a2
),u(ρ
a3
),u(ρ
a4
)有关。
[0183]
由于两次空气中双称量法的初始气压和气压下降比例均相同,因此可以认为u(ρ
a1
)和u(ρ
a3
),u(ρ
a2
)和u(ρ
a4
)全相关。其它分量的确定同20g~1kg一样。
[0184]
唯一不同的是,在这个测量过程中,砝码间的质量差≥1g,因此,质量比较仪线性引入的不确定度不可忽略。该不确定度可以估计为比较仪的局部线性最大误差与电称量范围的比值与砝码间质量差的乘积。
[0185]
例如:本实验中,metas质量实验室at106质量比较仪的最大线性误差为8μg,电称量范围为11g。
[0186]
由此,可以估计1g砝码体积测量时,质量比较仪线性引入的不确定度为u
linearity
=8
×
10-9
×
0.001/0.011≈7.273
×
10-10
kg。砝码体积测量的合成标准不确定度为:
[0187][0188]
其中:
[0189][0190][0191][0192][0193]
(3)砝码密度测量不确定度评定
[0194]
空气双称量技术可以同时测量被测砝码的质量和体积,因此被测砝码的密度值可以通过质量和体积的比值计算而得。
[0195]
通过公式(2.2.3-2),可以将被测砝码的体积相对不确定度转化为密度相对不确定度。同样,以静水力学法的测量结果为参考值,两种方法的密度比对结果如表2.2.3-4所
示。
[0196]
表中空气中双称量法测得的结果为静水力学体积测量前的结果,不确定度为k=2的相对扩展不确定度。
[0197][0198]
其中,ρ表示被测砝码密度,u(m)是被测砝码的质量标准物体不确定度,m是被测砝码的在静水力学法体积测量前进行的空气中双称量体积测量中,950hpa下测得的质量值。u(v)是被测砝码体积标准物体不确定度,v被测砝码的体积值。
[0199]
应当说明的是,上述实施例均可根据需要自由组合。以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。